
在之前有关离散信号的文章中,我曾提出一个问题:使用模数转换器(ADC)是否很简单,只需将传感器输出连接到其模拟输入,然后开始读数就可以了呢?如果ADC读数失控,什么原因?精明的读者肯定会发现我只给出了这个问题的部分答案:即接地通常是罪魁祸首。然而,它并不是唯一的问题根源。
驱动模拟输入也需要引起工程师的注意。通常三种情况下需要使用外部模拟驱动器来辅助ADC,这三种情况是:信号较小、信号比较嘈杂和高速信号。
采用尽可能大的范围
许多模拟传感器从最小读数到最大读数之间的电压摆幅都非常小。而且,理论摆幅与操作期间看到的实际摆幅也可能存在较大的差异。我们知道工程师们总喜欢按最坏情况做设计。但不利用外部驱动器适当缩放信号的情况下,而直接使用ADC,则是一个坏习惯。

举个简单的例子,家用温度计的读数范围从35°C(体温过低)到41°C(高烧),它可能仅仅利用了设备中传感器的一部分测量能力。再例如加速度计,当我们只需要±6 g时,±30 g那部分根本就用不到。
当读数仅占能力范围的一小部分时会怎样?想想看。如果高8位在ADC操作期间从未改变,那么恭喜您,我们已经将一个12位转换器变成了一个4位转换器。降低分辨率,信号中的细微差别就会消失。
因此,工程师设计传感器系统的过程可分为三步:
选择一个范围足够的传感器,并为正常操作期间预期的摆幅留出一些余量。
如果需要考虑滤除中位毛刺,则放大并移动传感器信号,并采用ADC输入范围的一半。
选择具有适当分辨率的ADC,以便在这一半范围内将读数间隔开。
可滤除一比特位甚至更高的噪声
外部放大还有另一个作用。模拟信号越强,越能抵抗噪声干扰,而且通过对ADC读数进行数字平均,还有助于消除白噪声。对于一个单端模拟子系统而言,只需一位的提升,就能将信噪比(SNR)提高到足以获得良好的性能。
很多地方都曾谈到单端输入信号与差分输入信号的概念。单端法仅使用一根导线来承载模拟信号,其返回路径依赖系统的接地。而差分法则使用两根导线,一正一负,呈现的是与系统接地无关的电压差。通过在两条导线上同时抵消噪声的影响,双绞线有助于使差分信号保持纯净。
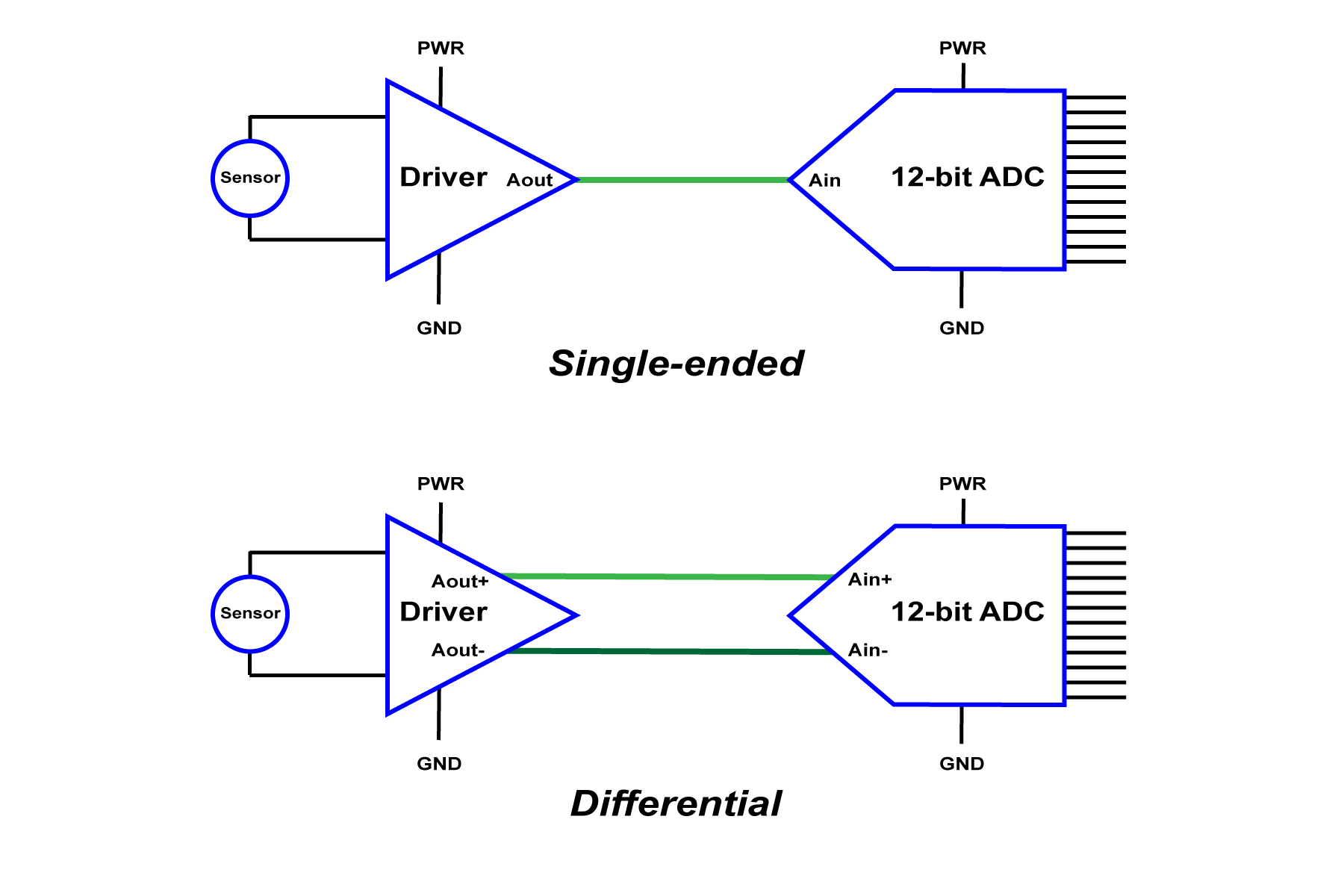
图1:单端与差分ADC信号的比较简化示意图。(资料来源:Stratiset)
上述已经暗示了使用差分输入可以对ADC性能进行升级。然而,绝大多数低成本ADC,包括微控制器中的ADC,都为单端输入。采样率较高的精密ADC通常都采用差分输入,由于可以获得期待的比特位数,这种升级是物有所值的。
更高的采样率
尽管我们尽最大的努力来做简化,但有时物理问题却不可避免。在许多ADC结构中,其模拟输入看起来是容性的,这让事情会变得有点复杂。例如,为了实现较好的捕获,一些ADC在采样保持电路中采用开关电容方案来保持信号稳定。然而,如果信号变化太大,驱动电流太小,以及充电时间不够,采样就达不到输入信号电平。
要克服电容浪涌就需要采用ADC驱动器,以快速泵送足够的电流。压摆率可以衡量驱动器的输出电压变化响应其输入的速度。高压摆率ADC驱动器还需要更高的带宽,大约为ADC驱动采样率的5到10倍。在雷达和5G设计中,采样率通常非常高,此时就需要传输线理论和阻抗匹配来发挥作用,但这通常已超出了大多数工程师的能力范围。
使部件选择更容易
在ADC技术方面,Stratiset已经取得了很大进展,现在已经达到可以为特定应用优化部件的程度。大多数ADC供应商还提供为特定任务创建的ADC驱动器选择功能,使工程师能够处理差分信号、压摆率、带宽和共模噪声抑制等。
采用外部模拟驱动器来辅助ADC,选择正确的量程,以从噪声中更好地提取信号。再结合量程可以覆盖预期物理输入信号范围的传感器,驱动器可以让ADC利用更宽的数字范围。随着速度的提高,ADC驱动器还可以为工程师在音频、无线电或视频应用提供帮助。
(参考原文:How to assist ADCs with external analog drivers)
本文为《电子工程专辑》2021年3月刊杂志文章,版权所有,禁止转载。点击申请免费杂志订