
Intel Automotive去年CES期间发布软件定义汽车SoC;8月份发布面向汽车的Arc A760-A显卡;我们都说Intel做汽车芯片的思路,颇有点早年PC/服务器处理器的感觉。
今年CES发布新的汽车芯片,宣布新的合作:更新车载Arc B系列显卡、发布针对区域控制器(本文将zonal controller译作区域控制器;将domain controller译作域控制器)和动力系统能源管理的所谓ACU(Adaptive Control Unit)——Intel自己说这是一种对MCU微控制器的变革;
和Red Hat红帽在汽车Linux操作系统上的合作,与为实现汽车软件开发左移而与AWS亚马逊云的合作,为车内视觉与娱乐效果而与Epic Games就PC级虚幻引擎的合作,以及就新发布的硬件开始与Stellantis和Karma合作等...


所有这些还是强化了我们对Intel车载芯片贯彻PC/服务器思路的认知。Jack Weast(英特尔院士、英特尔公司副总裁、汽车事业部总经理)在谈电动车可以更省电的话题时,就说PC领域的笔记本也是从多年前重达10斤上下、不到一小时的续航,走向现如今的轻薄本十几个小时的续航的;汽车也有机会完成类似的转变。
只不过在Intel看来,要真正达成软件定义汽车的目标,光靠做高性能芯片是不够的,所以Intel打算扩展汽车芯片产品组合:“Intel不仅是高性能计算提供商,也覆盖从动力系统到区域控制器不同业务产品”;以及真正从端到端的角度来做开发,在和整车非常接近、同架构的云上仿真环境做开发,实现所见即所得,还做到了软件开发的左移,加速产品上市时间...
本文还是依据这种思路,来谈谈Intel Automotive本次发布的芯片与合作。
软件定义架构:汽车之于PC/服务器
“如果去看媒体报道、市场材料,可能会发现大家都在做软件定义汽车。”Jack在媒体会上说,“但做软件定义,以及以正确的方式来做软件定义,其实是两件完全不同的事。”
过去两年有关汽车电子的报道文章,以及Aspencore的诸多汽车电子论坛与峰会,几乎都将“软件定义汽车”视作汽车电子发展的关键或核心。我们说软件定义汽车是随着汽车电子化程度加深、系统复杂度大幅提升,汽车EE电子电气架构由分布式走向中心化、跨域融合之后,增加中间抽象层,包括借助虚拟化之类的技术,实现更大程度的软硬解耦。
就像手机、电信通讯,乃至测试测量等诸多领域,都从以往的“硬件定义”走向了“软件定义”。手机从功能机向智能机时代的过渡,基本就可以认为是这一趋势的典型写照。其最原始驱动力还是一类产品或一个领域的数字化程度加深,系统复杂度显著增加,加上用户体验需求层面的不断提高。走向“软件定义”似乎是一切高度复杂电子系统的必由之路。
在这个问题上,我们总结Intel的理念或市场宣导大致有两个关键。其一,Intel在软件定义架构方面有着超过20年的经验,帮助包括云计算、制造、电信通信等领域转向了软件定义架构。“所以我们有最一手的经验,能够将专业知识带到汽车领域,帮助行业重构(re-architect)汽车走向软件定义。”Jack说。
这一点在我们看来是确切的。尤其是Intel在PC生态与标准上的构建历史,以及数据中心软件架构的支持——包括虚拟化、orchestration、容器等技术,都可以认为是“软件定义架构”的经验。设想汽车是一台接了四个轮子的超级计算机,其终极形态的“软件定义”,除了可能在功能安全与网络安全方面的不同,以及必然要保留的部分机械机构及其高实时性要求,“软件定义汽车”的终极形态想必和当代计算机就是相似的。
所以Intel才会有软件定义汽车SoC,以及加装独立显卡这样的硬件模块化思路,在我们看来就是一种对PC和服务器架构的思路延续。而且Jack在大约四五十分钟的媒体会主题演讲中,提到“PC”这个词有将近20次:无论是说要把PC这些年来提升效率、降低能耗的经验搬到车上,还是说PC游戏与娱乐的丰富体验+近代AIPC模型和应用生态也能用在车上。

其二,则在于针对当前暂时主导市场的竞争对手的评价:“软件定义架构并不是来自手机或平板世界的。”这是个挺有意思的评价。
就PC角度来看,Jack多次提及像是“座舱内的体验要突破手机和平板式用户接口的2D维度,走向3D”,乃至本次宣布和Epic Games的合作,把虚幻引擎带到Arc B显卡上,都在于“这不是手机、平板的版本,而是完整的PC版”。服务器角度,则像是“在汽车的功耗、性能、成本框架下,也唯有数据中心芯片特性能够正确支持负载的硬件隔离。”
还包括当代PC、服务器架构的可扩展性、灵活性,例如对外设(如多屏幕)的支持,性能扩展所需的多任务并行需求,“从技术积累角度来看,都是Intel擅长的”,而不是手机或平板生态的主场。还有在产品迭代时,Intel现有解决方案更易于迁移和实现开发资源的复用,而不需要“在下一代开发时花大力气做软件porting和调优”。
我们之前在评价Arm架构的PC时就提过,即便外观看起来是相似的笔记本PC,但源自于嵌入式设计基因的Arm PC和主流x86实现了标准模块化的PC,令OEM厂商的系统级开发方式、投入成本都不大一样。x86 PC的确还是先天具备了兼容性、可扩展性及生态快速壮大的优势。
所以Intel这番对于汽车座舱乃至整车架构的未来预期在我们看来还是有一定道理。但也需要看到,即便是笔记本PC、手机平板发展的这些年,也是双方硬件架构与标准逐步趋同的过程——Arm也不再是以前的Arm了,无论在手机、PC还是汽车上。
郭威(英特尔公司市场营销集团副总裁、英特尔中国网络与边缘及渠道数据中心事业部总经理)在答记者问时说:“我个人觉得以前的车更多是个机械产品,现在则越来越偏向电子产品了。我觉得现在的车可能更像20年前的PC或10年前的服务器。那时每一年的算力需求提升都很快。车未来5年可能也会经历这样的过程,车对算力的要求也会越来越高。”
3个板块:Intel眼中的软件定义架构
不过汽车作为一台需要行驶在路上、讲求驾乘舒适性、还要确保功能安全与网络安全的计算机,EE架构还是要比普通计算机更为复杂的。或者说计算机是当代智能汽车的一个(或多个)子集。要让这样一个复杂系统真正实现“软件定义”,并不是发布一颗软件定义汽车SoC芯片就能搞定的事。
“如果一辆车里面有100个ECU,把ADAS和信息娱乐系统整合起来,ECU的数量就从100个变为99个。”Jack说行业内盛行这样一个玩笑,“而我的目标是要把ECU缩减到50个,那还有49个ECU该怎么办?”所以Intel今年要扩充产品组合,其中就包括了区域控制器。
与此同时,对当代汽车而言光有算力还不行,“还和能效有关,不仅相关于电池的尺寸和重量,还在于电动汽车解决方案的成本”。所以藉由能耗管理SoC,包括针对OBC, DCDC, 逆变器等,提升效率、降低成本。
所以Intel当前框定做汽车芯片的三个板块,包括有
(1)中央计算——像是去年发布的软件定义汽车SoC、Arc独显;
(2)区域控制器(或域控制器)——PPT中的解释是,HPC SoC的软件定义概念应用到MCU上;并且针对安全(safety & security)实现工作负载的芯片级隔离;而且实现了可编程性,理应满足不同区域控制器的需求;
(3)面向动力系统的能源管理SoC,面向逆变器、OBC、DCDC等应用——“具备可编程性及类似ASIC的性能”,“大幅提高效率、降低成本”。
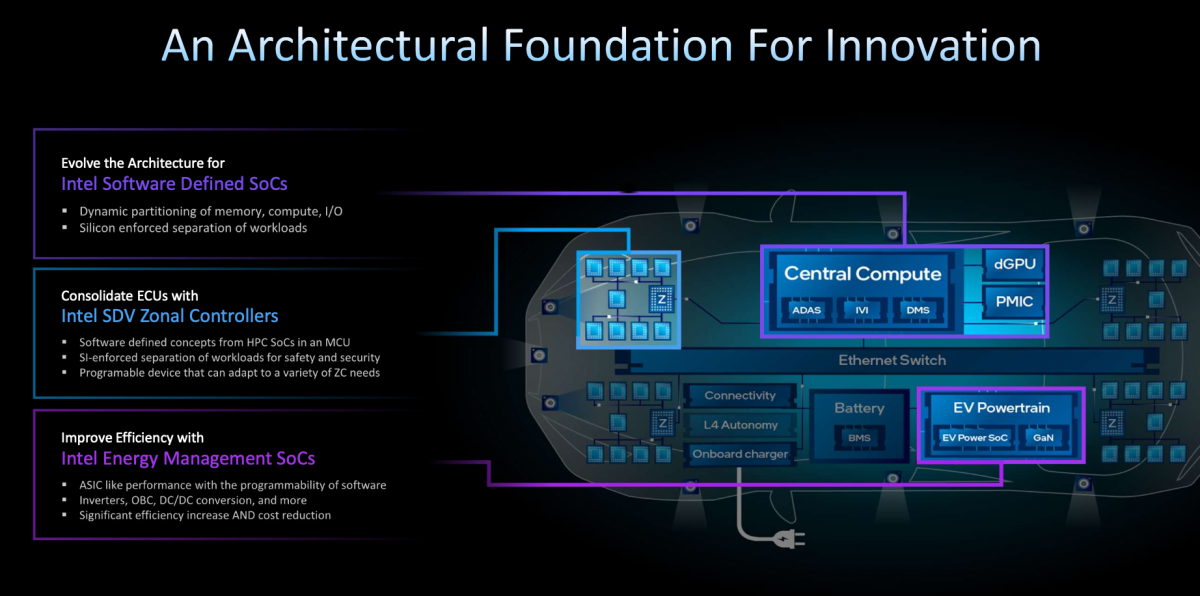
“借助(扩展到)整车的方法,关注汽车的这3个要素,这是我们关注的能够实现汽车重构的3个位置。对于车内这三个组件的每一个来说,我们相信Intel都具备了独特的适配性。”基于这种走向“整车”的思考,Jack才说就汽车领域内,现在“Intel不仅是高性能计算提供商,也覆盖从动力系统到区域控制器不同业务产品”。
在Intel看来,汽车芯片产品线的扩展及在3个板块的投入,“能够帮助汽车制造商,从整车、系统的角度,实现汽车的重构(re-architecture)”。
针对这3个板块,Jack还是做了比较细致地解释的。这里拣选一些我们认为有价值的信息谈一谈。首先在Intel看来,有了软件定义的区域控制器、有了软件定义的中央计算系统,则“工作负载可以在‘socket’之间迁移”,就好像数据中心之上的工作负载就不固定在某一个socket上跑一样——“它会跨整个机架、乃至整个数据中心”。
具体到实现上,比如电子后视镜可以在中央计算系统关闭的情况下迁移到更低功耗的计算单元上。这种能力实现需要“扩展到车内多socket之上,采用真正的软件定义思维模式”。
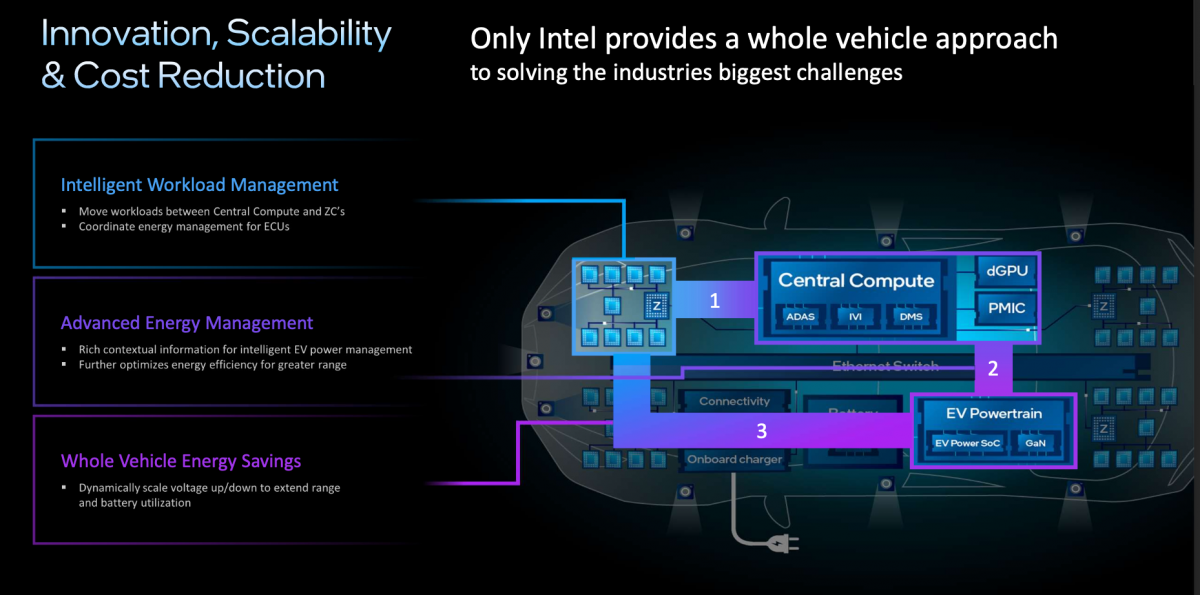
其次,有关能源/能耗管理系统,Intel认为现有解决方案大部分不够智能。比如说剩余行驶里程预测功能,常规解决方案是通过计量电池中的贮存能量,基于平均能耗来进行简单计算得到。但如果车里有超过4名乘客,甚至更高载重,或者有一段距离较长的爬坡,外界温度都在变化,则这种简单计算方法得到的里程信息就会极为不准确。
将座舱域、中央计算系统等感知到的丰富上下文信息,和动力子系统共享,不仅能够让里程预测变得更准确,而且在必要时也能改变动力系统的功耗和性能模式:比如对于一名驾车风格相对保守的司机,则发动机经常处在中低负载状态,显然令其工作在低功耗模式下有利于节能;且可以在有需要时回到性能模式。
扩展到整车范围,则不光是电子后视镜的负载迁移可以节能;还可更进一步考虑“充电时,ADAS ECU可以关闭;底特律的冬天,空调ECU也不需要开着”。“从整车角度智能管理能耗,就能获得极大程度的能耗节约”。
这些思路中的其中一些,还真是相当的PC/服务器思维。而在Intel看来,Intel Automotive也是行业内为数不多真正具备上述三项能力、能够从整车角度出发来解决问题的芯片企业。
新发布两款芯片:有颗域控制器
基于上述思路来看Intel在CES上发布的汽车芯片新品就很好理解了。首先在“中央计算”方面,Intel发布了车用Arc B系列显卡——上个月,Intel刚刚面向PC发布了Arc B570/B580显卡,我们前不久才做了体验。
面向汽车的Arc B系列显卡暂未公布具体型号,主要应用于座舱:执行包括LLM大语言模型本地推理、3A游戏图形渲染、AI内容生成(Jack举例说可以在长途驾车过程中为车上的孩子生成娱乐内容),及更出色的视觉体验等工作。

相应的在图形渲染生态支持上,Intel这次也宣布了和Epic Games的合作,“将虚幻引擎(Unreal Engine)带到Arc B系列车载显卡上”,而且强调是PC完整版的引擎,而非手机、平板所用的版本,“提供下一代视觉体验”。似乎不久之后还会有更多相关此发布的信息公布。
其次是本次CES之上Intel发布的重点产品ACU(Adaptive Control Unit,具备可适应能力的控制单元)——面向前文提到,除中央计算的另外两个组成部分:区域或域控、动力系统的能源管理。
就面向动力系统的能源管理角度,除了前文探讨Intel期望进一步从整车角度来实现软件定义汽车这一原因;从相对具体的应用来看,Intel认为当代汽车的电子动力系统效率是比较低下的。
来自墙插的电力,经过OBC, 电池管理系统, DCDC转换, 逆变器...电机获得电能、驱动车轮前进。“由于每个环节都会损失3-15%的能量,损失的电能可能达到40%。”Jack解释说,这些损耗转为热能,还需要耗散和管理。“所以我们需要关注效率问题”,“我们在路上损失了这么多的能耗,皆因现有算法方式(algorithmic approaches,如SVPWM)和芯片方案的低效。”
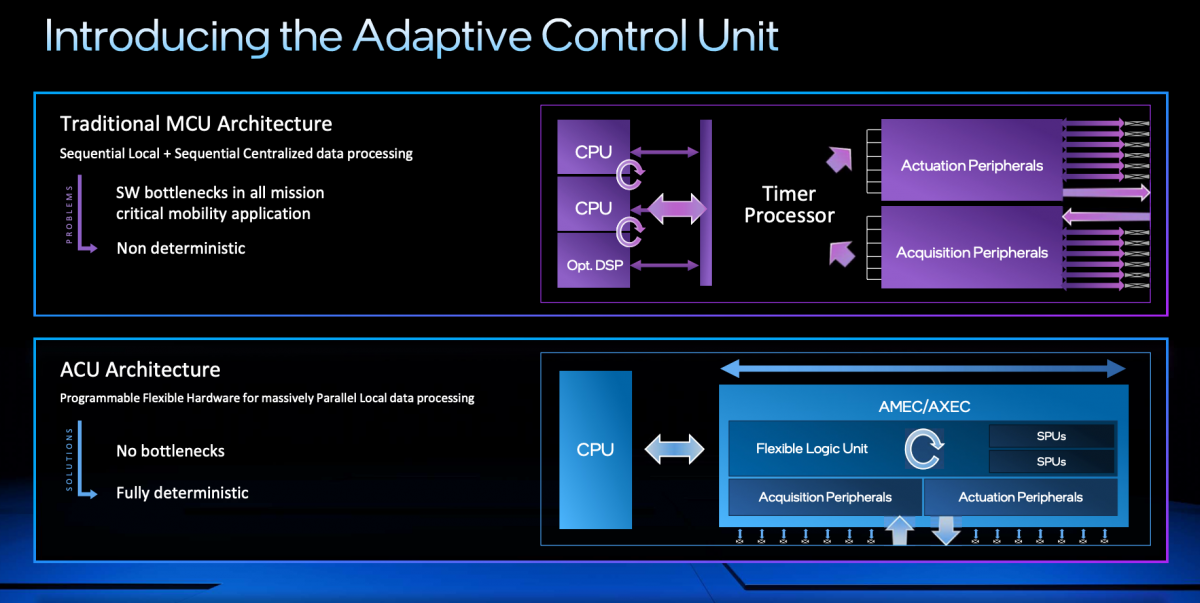
想必这是Intel本次发布ACU的直接原因——也是去年Intel宣布收购Silicon Mobility之后的产出成果。从上面这张图来看,相比于传统MCU架构,所谓的ACU尤其针对新的算法方式(如OPP, optimized pulse patterns)设计:在同时有CPU的基础上,还加了可编程弹性逻辑单元FLU——“可以把它想象成可编程的加速器,转为实时控制负载设计”。
“采集信号进入(到芯片)以后,它每次都能在可保证的时间内(应该是指满足实时性的低时延)进行确定的处理,且完美并行处理成百上千的信号。”“消除所有不确定性(non-determinism)和延迟影响,执行传统MCU或DSP完全做不到的全新算法。”——有关高并行、低延迟支持,是Jack提到传统MCU要么需要等待顺序执行,要么多核可能影响延迟和确定性。
不过目前我们暂时没有这颗新发布ACU的硬件规格参数。Intel只是在媒体会上提到在动力系统中用这颗ACU,每个阶段能效提升至多5%;同性能的电机尺寸可缩减25%;达成相同里程的电池电压降低至多20%;减少制冷系统的尺寸和重量多达50%;DC Link转换器体积和重量缩减最多66%;
而提升能源效率本身也能够降低成本或提升车企的利润空间。Intel明确数据,采用ACU及类似OPP这类调制技术以后,最终逆变器BOM成本可以缩减40-70美元——“这还不包括给电机、电池带来的好处”。“我们在移动计算机领域已经有过这类经验,在电动车上自然可以再来一遍。”
在ACU就动力系统提升能源效率的合作上,Intel本次宣布Stellantis采用其解决方案,用于Formula E电动方程式赛车。Jack说对于方程式赛车而言,效率均衡尤其重要。
除了面向动力系统以外,由于ACU的“可适应性”,也和很多传统MCU一样,这颗芯片可以用在不同的域(domain)或区域(zonal)——一颗芯片适配汽车拓扑的各种不同区域,从供应链的角度来看也实现了更简单的物料管理。
而且据说已经有合作伙伴通过比较严格的FFI区隔——主要是针对可编程区域,ACU就相当于将多MCU解决方案合成为一颗芯片,相比传统多核MCU实现更好的性能、确定性和实时性。
Jack评价ACU是行业内“一类全新的产品”,并且“我们认为汽车行业是时候从传统的MCU转向ACU了”,“让汽车制造商拥抱软件定义的概念,包括了微控制器——也就是我们的ACU”。
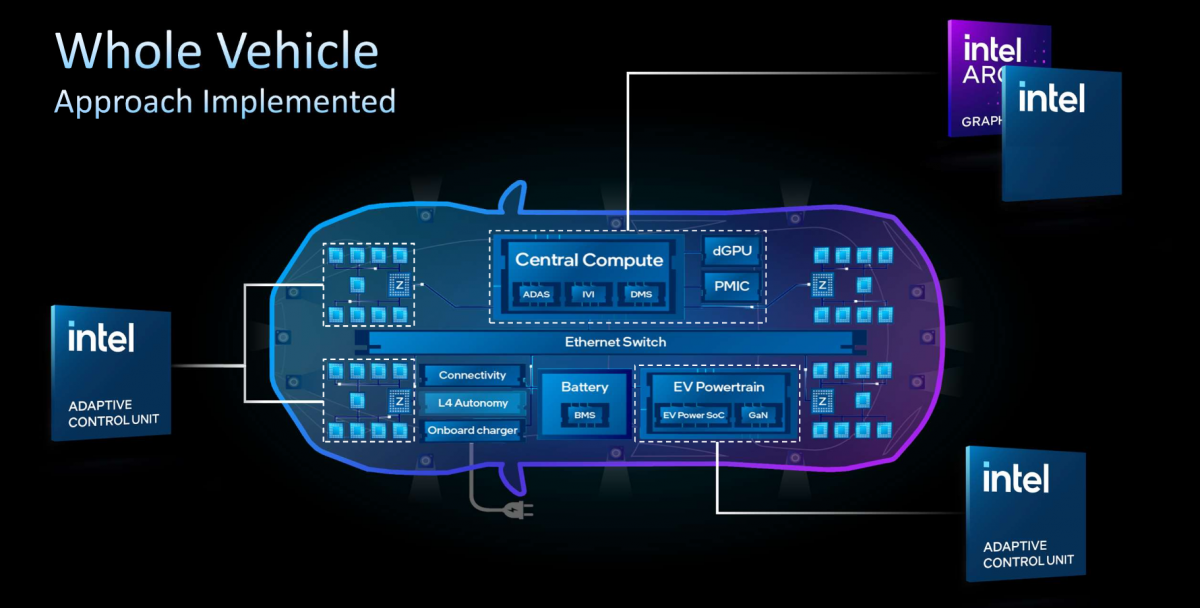
所以软件定义汽车SoC(今年Q1出货上量)、Arc独显、ACU控制器(面向不同域/区域,以及特别针对动力系统提升能耗效率)的硬件基础之上,Intel认为车厂更加能够从整车角度出发,实现效率提升、成本节约,实现真正的软件定义汽车和汽车的“重构”;而Intel提供的是“架构底座”(architectural foundation)。

有关生态与合作
除了前文已经谈到,图形渲染方面与Epic Games就虚幻引擎的合作,ACU应用到动力系统能耗管理方向上与Stellantis的合作,Intel还在CES上宣布了另外几个汽车相关的重要合作。
其一是上述畅想中从整车重构的角度实施软件定义汽车解决方案,现阶段Intel找到的合作伙伴是北美的一家车厂Karma——预计2026年要上路的车会“完全拥抱这种完整架构方法”,即上述三大板块结合后的系统——据说用上了Intel现有的所有汽车芯片;可在不同socket之间进行负载迁移的架构方法,“不限于单个socket”的软件定义架构。
其二为Intel Automotive与红帽(Red Hat)的合作——在我们看来这也是延续数据中心思路的一起合作。“红帽也致力于针对汽车应用带来功能安全认证的Linux环境。”Jack表示,“我们会支持Red Hat,支持Intel芯片基础上、通过功能安全认证的Red Hat车载操作系统将来的所有版本。”
其三,和AWS亚马逊云的合作,在云上构建所谓的Intel VDE(虚拟开发环境)。简单来说,也就是我们之前常说的,芯片企业面向下游开发者,可实现软件开发“左移”。当代硬件开发,无论是芯片本身的开发,还是电子系统的开发,都已经在追求软件开发并行——或者说不同于以往硬件开发完了,才能基于此做软件开发,现在软件开发实现了开发周期的“左移”。
不过Intel在此强调的是VDE不仅实现了“左移”,而且能够实现开发成本的降低。原因是AWS之上的VDE环境,其实例也采用和Intel汽车芯片一致的x86架构(至强处理器)——和最终的汽车芯片及系统相比,不仅功能匹配,而且架构、性能也匹配。

“通过AWS云访问相同的车载芯片,开发者能够看到车上所有的显示器、电子后视镜、摄像头,甚至车载音频与视频——和车上一致的环境,因为(车载和云上的)芯片架构是一样的。”
也就不需要受制于传统开发仿真/模拟环境和最终产品的性能/环境不匹配的问题,还能进行云上的并行、协同开发——无需在意开发过程中开发硬件平台数量不够的状况发生。所以基于AWS云VDE的开发“不仅是功能开发,也相当于性能评估”,“缩短开发周期”、降低开发成本。“在云上做hardware-in-the-loop测试”,不需要耗费大量成本“构建实验室和各种目标平台开发板”。
这又是个借助于数据中心市场优势,所做的尝试,在Jack看来是竞争对手所完全不具备的、专属于Intel的架构优势。
PC、服务器之后的下一个计算密集型平台
去年Intel就强调了在走向汽车EE架构变迁之路上,要关注的三个方向:软件定义、可持续性、可扩展性。Intel推出软件定义汽车SoC、车载Arc显卡,及此次宣布扩展产品线推出ACU芯片——既面向动力系统提升能源效率,也着眼于适配不同的域或区域,基本也是这三个方向的体现。
包括前文提到的Intel在其他领域内的“软件定义”架构构建上超过20年的经验;
能效、续航里程、成本、重量等相关的“可持续性”——Intel也认为自己在PC等领域已经建立起了相关经验;
“可扩展性”(或可伸缩)解决方案,则在于强调在面向不同定位及寻求差异化的整车产品时,不仅是从低到高的算力覆盖,还包括借助chiplet之类的技术,乃至集成三方chiplet,在Intel Foundry的加持下,为客户提供定制化、可伸缩的解决方案。
去年的报道文章已经对此做过比较详细的介绍。无论从这三大方向,还是Intel现阶段关注的三个板块,亦或推出的芯片产品及合作企业,还是能够嗅到浓重的PC和服务器味儿,毕竟这是Intel的优势市场。郭威说,在PC、服务器之外,“汽车是下一个计算密集平台”,所以Intel将车放到如此战略高度,“期望汽车能够成为公司业务下一个支撑”。
在软件定义汽车的EE架构变革之路上,Intel显然是期望像PC和服务器市场那样,依托以往的软件定义架构经验,构建起一套属于汽车的新标准的。
