
雷达在新型汽车设计中随处可见:可以检测汽车周围的危险,为制动、转向和停车决策提供信息,还可以在车舱内为驾驶员和乘客监控系统提供信息。现在,高清雷达可以在所有天气条件下发挥作用,可以作为AI物体检测的前端,与其他传感器通道相辅相成,进一步提高准确性和安全性。
高价值嵌入式雷达系统的制造商有着巨大的潜力。然而,如何在竞争中发掘这种潜力可能是一项挑战。在此,我们将探讨其中的一些挑战。
全系统挑战
汽车OEM厂商并不只是为新车添加更多电子功能,他们还正在为其产品线推动统一的系统架构,以管理成本、简化软件开发和维护,并提高安全性和保障性。

因此,更多的计算和智能正在向综合的区域控制器转移,一方面在汽车小区域内相对较小的传感器和处理器之间进行通信,另一方面在区域控制器和中央控制器之间进行通信,以管理整体决策。
面向汽车雷达系统市场的供应商必须根据这些变化调整其解决方案架构,在相对简单的边缘功能处理和更广泛的区域控制器或中央控制器功能之间提供可扩展性,同时灵活适应不同的OEM分区选择。
一个重要的含义是,无论解决方案如何分区,都必须允许在边缘、区域和中央计算之间交换大量数据。这就提出了在传输过程中压缩数据以管理延迟和功耗的重要性。
除了性能、功率和成本限制外,汽车系统还必须考虑使用寿命和可靠性。汽车的整个使用寿命可能是10年、20年或更长时间,在此期间可能需要对软件和AI模型进行升级,以修复检测到的问题或满足不断变化的监管要求。
这些限制要求在雷达系统设计中在硬件的高性能/低功耗与软件适应变化的灵活性之间保持谨慎的平衡。这并不是什么新鲜事,但与视觉流水线相比,雷达流水线提出了一些独特的要求。
流水线挑战
完整的雷达系统流程如下图所示,从发射天线和接收天线一直到目标跟踪和分类。天线配置下到低端检测可以是4×4(Tx/Rx),上到高清雷达则可以是48×64。在雷达前端之后的系统流水线中,首先是计算距离信息的快速傅里叶变换(FFT),然后是计算多普勒信息的FFT。接下来是数字波束形成阶段,用于管理来自多个雷达天线的数字流。
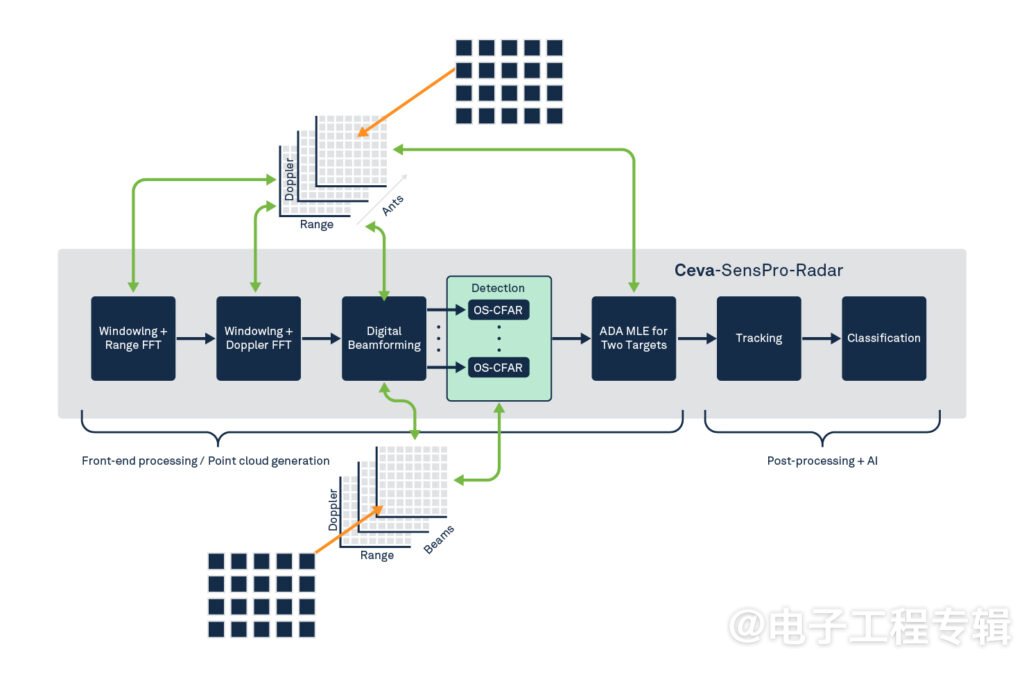
一个完整的雷达系统流水线从发射/接收天线一直延伸到目标跟踪和分类。(来源:Ceva)
到目前为止,数据在某种程度上仍然是一种“原始信号”。恒定误报率(CFAR)阶段是将真实目标从噪声中分离出来的第一步。到达角(AoA)计算完成了目标在3D空间中的定位,多普勒速度计算则增加了第4个维度。最后,流水线以目标跟踪(例如使用扩展卡尔曼滤波器EKF)和对象分类(通常使用OEM定义的AI模型)作为结束。
好吧,步骤很多,但它们为何如此复杂?首先,雷达系统必须在前端支持有效的并行性,以处理大型天线阵列,通过流水线同时推送多个图像流,同时提供每秒25到50帧的吞吐量。
数据量不仅仅取决于天线的数量。它们将馈入多个FFT,每个FFT都可能非常大,高达1K个窗口(bin)。这些转换最终会将数据传输到点云,而点云本身可轻松达到半兆字节。
巧妙的内存管理对于最大化吞吐量至关重要。以距离FFT和多普勒FFT两个阶段为例。从距离FFT写入内存的数据是一维数据,按行写入。多普勒FFT需要按列访问这一数据,如果没有特殊支持,列访问所隐含的地址跳转需要每列进行多次突发读取,从而大大降低了可行的帧速率。
CFAR是另一项挑战。CFAR有多种算法,有些算法比其他算法更容易实现。当今最先进的算法是有序统计CFAR(OS-CFAR),当存在多个目标时(汽车雷达应用中很常见),该算法尤其强大。不幸的是,OS-CFAR也是最难实现的算法,除了线性分析外,还需要统计分析。尽管如此,当今真正有竞争力的雷达系统都应使用OS-CFAR。
在跟踪阶段,位置和速度都很重要。它们都是三维的(X、Y、Z表示位置,Vx、Vy、Vz表示速度)。有些EKF算法会放弃一个维度(通常是海拔高度)以简化问题,这就是所谓的4D EKF。相比之下,高质量的算法会使用全部6个维度(6D EKF)。所有EKF算法的主要考虑因素是它能跟踪多少目标。
虽然飞机可能只需要跟踪几个目标,但高端汽车雷达现在能够跟踪数千个目标。在考虑高端和(略微缩小的)中程雷达系统的架构时,这一点值得牢记。
分类阶段的所有挑战都是以AI模型为中心的,因此不在本雷达系统的讨论范围之内。这些AI模型通常会在专用NPU上运行。
实施挑战
一个显而易见的问题是,什么样的平台才能最好地满足所有这些雷达系统的需求?它必须具有很强的信号处理能力,必须在低功耗下满足吞吐量目标(25-50fps),同时还必须具有软件可编程性,以便在较长的使用寿命内具有适应性。这就需要DSP。
但是,它还必须同时处理多个输入流,这就需要高度的并行性。一些DSP架构支持并行内核,但对于许多信号处理功能(例如FFT)来说,所需的内核数量可能过多,硬件加速器可能更合适。
与此同时,解决方案必须能够跨在区域汽车架构进行扩展:用于边缘应用的低端系统,为区域应用或中央应用中的高端系统提供数据。它应为每个应用提供通用的产品架构和通用的软件栈,同时又能简单地进行扩展,以适应从边缘到中央控制器的各个层次。
Tomer Yablonka是Ceva公司移动宽带业务部门的蜂窝技术总监。
(原文刊登于EE Times姊妹网站EDN,参考链接:Challenges in designing automotive radar systems,由Franklin Zhao编译。)
本文为《电子工程专辑》2024年7月刊杂志文章,版权所有,禁止转载。免费杂志订阅申请点击这里。