
光探测和测距(激光雷达)的概念最早出现于20世纪30年代,与无线电探测和测距(雷达)几乎同时出现。然而,直到20世纪60年代激光器出现后,该技术才得以展示,后来,光通信的发展推动了激光器和光调制技术的重大进步。
2008年,第一个商用激光雷达系统(最初称为“光学雷达”)在沃尔沃的乘用车上首次亮相。这项开创性的技术为首批自动紧急制动(AEB)系统之一提供动力,使车辆能够自动采取制动措施,防止或减轻追尾事故。
高分辨率激光雷达早在15年前就已问世(随后被雷达取代,成为AEB的廉价替代品),此后迅速发展成为自动驾驶汽车计划的关键高分辨率传感器,并催生了多家资金雄厚的创新型初创公司。这项技术提供了更远的距离、出色的分辨率和车辆周围环境的实时3D可视化,如今已日趋成熟,不仅成为了一种用于自动驾驶的重要的传感器模式,还可用于补充乘用车和商用车队的高级驾驶辅助系统(ADAS)。

激光雷达传感器发射红外光谱中的光子来检测和创建周围环境的3D图像。事实证明,它们在汽车应用中非常受欢迎。与雷达相比,激光雷达的主要优势在于其所使用的光波长非常短,因此可以进行精确的测量。此外,与摄像头相比,激光雷达可以在任何光照条件下工作,并且检测范围更大。激光雷达传感器所采集到的数据可视为一种“点云”(见图1)。
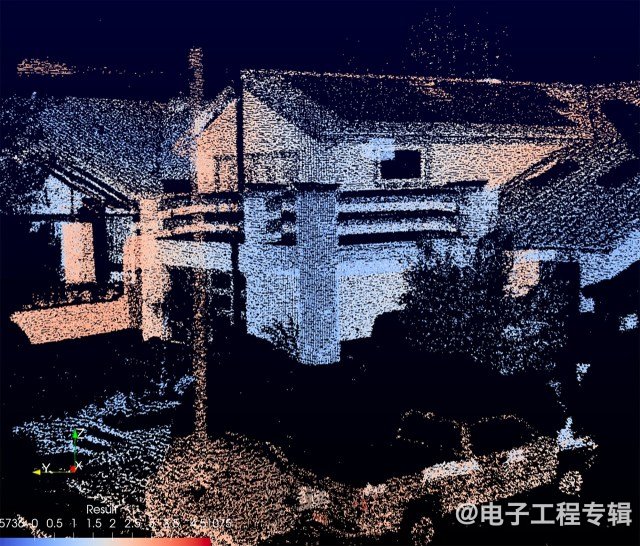
图1:激光雷达“点云”示例。
在开发激光雷达系统时,有很多事情需要考虑,例如使用什么波长、扫描方法以及如何处理干扰。然而,最大的系统决策是如何以最佳方式检测返回的光子。主要有两种方法,即直接检测和相干检测。
直接检测
在直接检测系统中,发射的激光脉冲会有效地启动计时器。当接收到激光脉冲的回波时,计时器停止,并根据经过的时间计算距离。见图2。
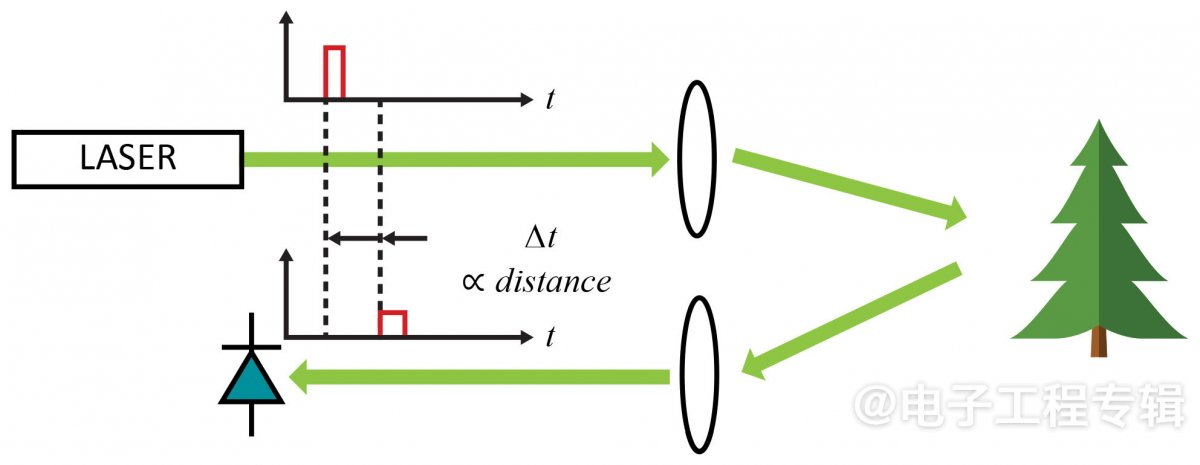
图2:由于光速(c)恒定,因此到目标的距离为Δtc/2,其中Δt是光子发射开始到光子接收前沿之间的时间。
对于最远约50m的距离,不需要使用高质量的可调谐单模激光器(因为它只是一种在短时间内压缩大量光子的光源)或调制,从而简化了驱动电路。也不需要精密光学器件来补偿波前畸变。
为什么距离短?随着照射面积随距离的增加而增大,返回功率也会减小(与距离的平方成正比)。注意,计算公式为:返回功率约等于发射功率×(目标面积/照射面积)×(接收面积/(π×距离2))。损失是无法避免的,因此最简单的解决方案是发射更大的功率或提高接收器的灵敏度。
但是,可用的激光功率是有限的。强烈的近红外(IR)光(800至1400ηm)会损害人的视力。在ADAS或自动驾驶汽车应用中,单纯提高近红外光的发射功率会对其他道路使用者和行人造成危险。
至于提高接收器灵敏度,可以使用面积更大的接收透镜来增加光子收集量。此外,还可以使用雪崩光电二极管(APD,具有本征增益的光电二极管),不过它们往往价格昂贵、易碎、体积小(使系统光学更加复杂),并且只能提供高达约15倍的增益,否则自生噪声将成为问题。其他类型的传感器,如盖革模式雪崩光电探测器(GMAPD)和单光子雪崩探测器(SPAD)在直接检测激光雷达系统中具有更高的灵敏度,但在多雪、多尘或多雾的环境中效果不佳。
此外,所有检测系统都需要某种形式的抗干扰措施。无论是雷达还是激光雷达,系统都需要知道其接收器接收到的信号(无论是脉冲无线电波还是光子)来自其发射器。干扰问题在脉冲汽车雷达的早期就已出现。一旦许多汽车都配备雷达,相互干扰就成了问题。最流行的解决方案是改用相干检测技术,对于雷达系统来说,主要是调频连续波(FMCW,见下文)。
直接检测激光雷达的另一个局限是它不能直接测量每个点的速度,而必须通过确定距离随时间的变化来计算(即比较多个后续帧),这可能会影响系统的响应速度。
相干检测和FMCW
这涉及将入射光与透射光样本混合,这样做有两个主要好处。首先,可以通过建设性干涉(即接收信号与发射信号相乘)实现光子增益的无噪声放大,从而使系统能够使用极低功率的激光器实现出色的灵敏度。其次,发射信号和接收信号的混合使激光雷达系统具有很强的选择性,因为波长不完全相同的光(如阳光或来自相邻激光雷达系统的光)会被忽略。
有多种方法可实现相干检测激光雷达系统,但最流行的是调频连续波(FMCW)调制。图3显示了一个简化示例。
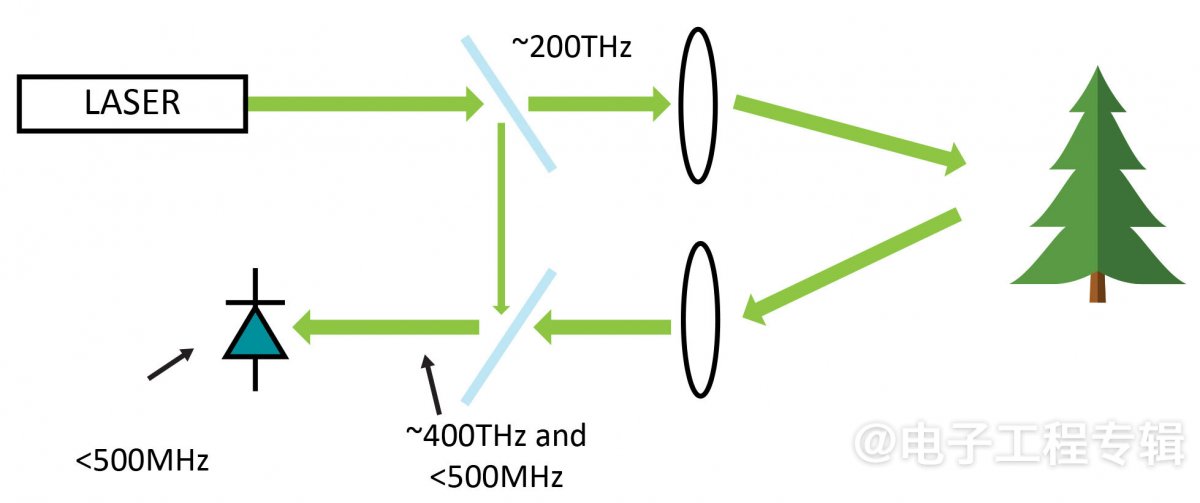
图3:激光器的工作波长在1550ηm左右,调制频率为几百兆赫(例如从1550.002到1550ηm)。发射信号(和反射信号)约为200THz。当光混合后,光电二极管得到两个信号的和与差。光电二极管的带宽有限,不会对约400THz的和做出响应,只能检测几百兆赫的差信号。
实际上,激光器在频率上下扫频,以产生锯齿状轮廓(频率与时间的关系),由此即可推导出距离和速度;关于后者,可以参考多普勒效应。图4显示了光学元件的更详细概览。
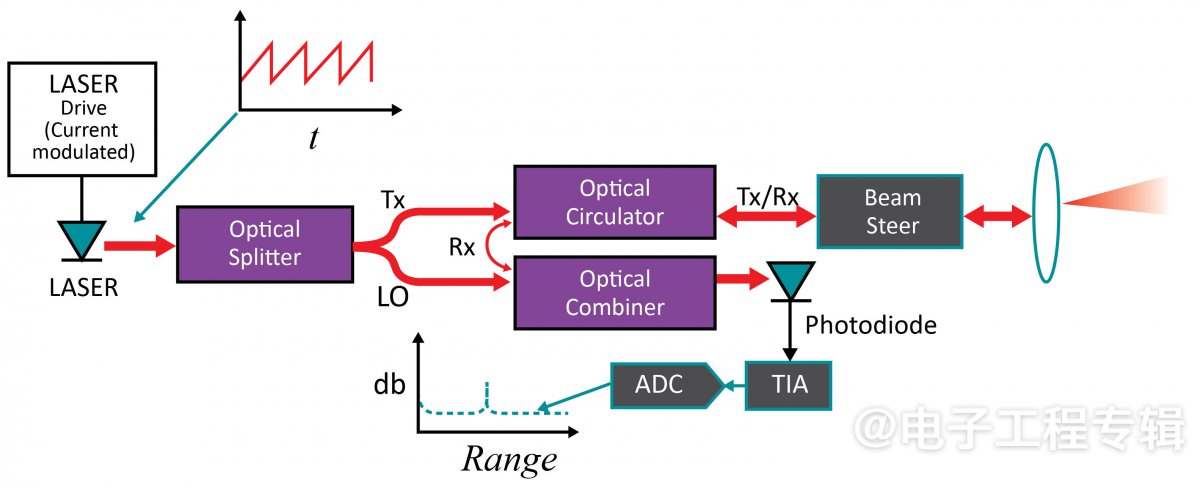
图4:FMCW激光雷达系统的主要光学元件。
尽管FMCW激光雷达比直接检测系统复杂,但其优点也很多。例如,如前所述,返回信号乘以从发射源(图4中的本地振荡器LO)采集的样本。由于激光雷达的路径损耗很高,即使只有LO的百分之几,也会比返回信号大得多。信号的放大量非常大,但仅限于波长完全相同的信号,因此光子效率很高。
例如,用小于200mW的激光功率就能实现约300m范围的FMCW激光雷达系统。而类似的直接检测系统需要1000倍的峰值功率才能达到相同的范围。值得注意的是,FMCW是其他领域激光雷达的核心;例如,范围可达数千米的光学测高仪,以及范围超过500m的用于风特性测量的激光多普勒激光雷达。
相干激光雷达的另一个优点是信号链的带宽相当低。如果我们考虑图3中的波长(激光从1550.002扫描到1550ηm),光电二极管的带宽可限制在几百兆赫。直接检测系统需要尽可能宽的带宽(通常超过2GHz),以便分辨接收脉冲的前沿。
可以理解的是,较窄的带宽允许在光电二极管上使用噪声较低的跨阻抗放大器,并使用速度较慢的模数转换器(ADC)。
最后,相干检测可提供每点速度信息。每点速度的好处是,它是一个额外的上下文指标,后续感知系统在解释激光雷达(和其他传感器)数据时可以使用它,从而有可能实现更明智的决策。
因此,相干检测的各种好处都很重要,但相干激光雷达并非没有挑战。
激光器必须能够在足够长的时间内保持相位完整性,使其光线能够到达最远的目标并从那里返回。如果激光器的相位在传输时间内发生很大变化,相干性就会丧失,从而导致测距模糊。此外,还必须对它进行频率调制(在FMCW的情况下)。大多数二极管激光器都无法胜任这项任务,但商业市场上已经出现了许多可以胜任的半导体可调谐激光器。
此外,并非每种扫描装置都与相干检测兼容。接收器需要观察每个光点足够长的时间,以便使光线到达最远的目标并从那里返回,因为需要将返回信号与发射信号混合。例如,在300m的范围内,扫描装置需要保持静止至少2µs的时间,但许多连续移动的扫描装置无法做到这一点。
最后,必须注意的是,相干激光雷达的信号处理任务比直接检测要大得多。幸运的是,半导体制造商已经推出了功能强大的片上系统(SoC),这些产品将数据转换器、微控制器和带有FFT加速器的DSP集成在一起,可以满足这些信号处理需求:indie Semiconductor公司的iND83301 Surya激光雷达SoC就是这样一个例子。
总结
不同的激光雷达应用受益于不同的设计方法。如前所述,在航空地面勘测等需要极远距离、激光雷达系统相互干扰风险小或不会伤害人眼的应用中,大功率脉冲直接检测可以很好地发挥作用。
然而,对于ADAS和自动驾驶地面车辆等应用来说,如果需要小于1km的检测距离,并且很有可能部署了其他潜在干扰的激光雷达系统,那么相干检测(尤其是FMCW)就具有多种优势。这些优势包括抗干扰(包括太阳光干扰)、高信噪比(在恶劣天气条件下非常重要)、本地高精度速度检测(为感知系统提供额外信息)和易于系统改装。出于这些原因,相干激光雷达检测正逐渐被考虑用于多种用途,尤其是下一代汽车传感。
Chet Babla是indie Semiconductor公司的战略营销高级副总裁,负责扩大公司的Tier 1和汽车OEM客户群,并支持产品路线图开发。他拥有超过25年的行业经验,职业生涯始于模拟芯片设计师,最近担任了Arm汽车业务副总裁,领导团队专注于提供汽车应用所需的处理技术,包括动力总成、数字驾驶舱、ADAS和自动驾驶。在加入Arm之前,Chet Babla曾在半导体行业担任过多个高级职位,还曾就ICT贸易和投资战略为英国政府提供过建议。他拥有英国哈德斯菲尔德大学电气与电子工程一等学位,并完成了加州大学伯克利分校哈斯商学院的高管领导力课程。
(原文刊登于EE Times姊妹网站Embedded,参考链接:Why coherent lidar is gaining traction in ADAS and automotive sensing,由Franklin Zhao编译。)
本文为《电子工程专辑》2024年7月刊杂志文章,版权所有,禁止转载。免费杂志订阅申请点击这里。