
继2022年11月推出第二代RFCMOS雷达芯片组解决方案TEF82xx系列之后,在不久前结束的CES 2024上,恩智浦半导体(NXP Semiconductors)又发布了最新的第三代汽车雷达单芯片SAF86xx系列,以及即将投入应用的第六代汽车毫米波雷达。
揭开第三代汽车雷达单芯片的神秘面纱
全新的SAF86xx单芯片集成了高性能雷达收发器、多核雷达处理器和MACsec硬件引擎,可通过汽车以太网实现先进的安全数据通信。尽管它仍然采用了与2023年发布的SAF85xx相同的通用架构,但与上一代40nm或45nm产品相比,其28nm RFCMOS性能让雷达传感器的能力得到了更显著的提升。

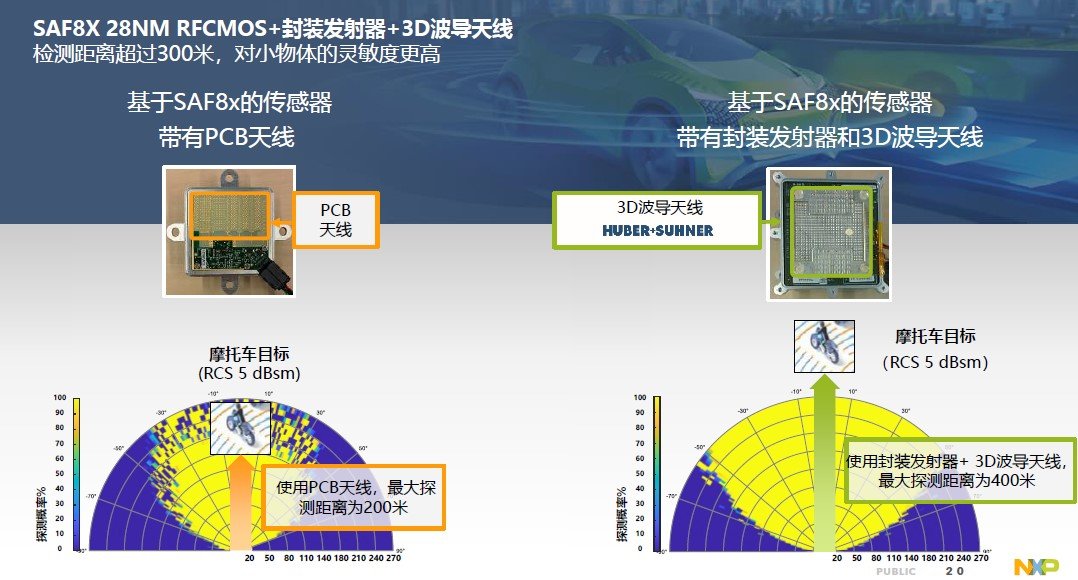
例如,高度集成的76-81GHz雷达SoC能够以最高1Gbit/s的速度串流传输大量低层级雷达传感器数据;检测范围也延伸到了300m以外,可对路缘石等小物体以及骑行者和行人等弱势道路使用者实现更可靠的检测。如果再配合恩智浦S32高性能处理器、车载网络连接和电源管理,这一完整的系统解决方案进一步为实现先进的软件定义雷达铺平了道路。
SAF86xx并不是NXP首款28nm雷达产品。事实上,无论是支持4发4收的77GHz长距离雷达还是角雷达芯片解决方案,恩智浦都采用了28nm工艺。而在由4颗收发芯片搭配1颗S32R MCU组合成的高分辨率4D成像雷达芯片组解决方案上,凭借16nm FinFET MCU技术,更是实现了12发16收的配置以及小于1度的角分辨率感知。
值得一提的是,第三代RFCMOS雷达中还加入了7比特相位旋转器和封装发射器(LiP)。在汽车雷达设计中,移相器配合RF发射链路,可以实现更复杂的MIMO波形设计,让毫米波雷达兼顾远距离和高分辨率,但这也对后端算力提出了更高的要求。根据杨昌的介绍,基于S32R4x的雷达处理IP被集成到SAF85xx中,实现了无缝扩展。这其中包含了雷达加速器SPT3.x,可以实现雷达FFT、VMT、峰值检测,以及数据压缩等常用功能的硬件加速;同时,其整体架构与恩智浦4D雷达S32R41、R45保持兼容,确保了较高的软件可复用率。
而LiP封装则支持3D天线设计的关键所在。该封装发射器通过一个较低成本的FR4 PCB板材直接引入一个3D波导天线,实现了3D的发射阵列和接收阵列。数据显示,相比传统平面型贴片天线,3D波导天线有9dB RF性能的提升,可以在降低尺寸的同时大幅提升雷达对物体的感知能力。
安全方面,新一代雷达单芯片根据ISO 26262单独使用的安全元件(SEooC)方法开发,其HSE安全引擎可满足新的安全要求。作为独立使用的芯片时,符合ASIL B级和ISO/SAE 21434标准,并支持NCAP安全功能,包括紧急制动和盲点检测。同时,SAF86xx还支持先进的ADAS和自动驾驶应用,包括SAE 2+和3级的高级舒适性功能,例如交通拥堵辅助、高速巡航和停车辅助、前方和后方横穿交通警告以及横向和后部防撞。
从“边缘处理”到“分布式处理”
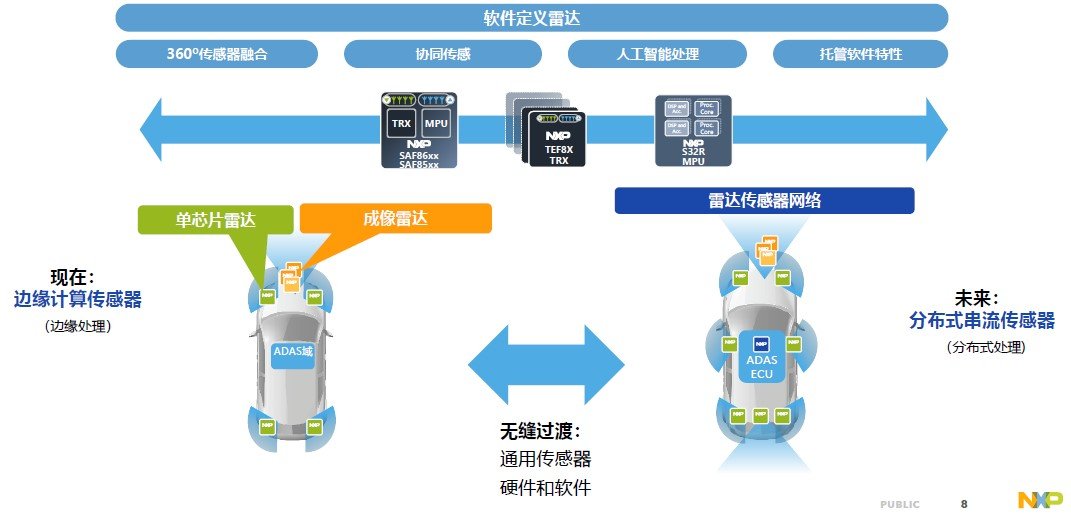
“分布式雷达传感器网络是我们这次在CES 2024上提出的全新概念,代表了恩智浦对软件定义汽车(SDV)架构下毫米波雷达未来发展方向的思考。”恩智浦大中华区汽车电子事业部ADAS产品市场经理杨昌在接受《电子工程专辑》采访时,为我们梳理了未来分布式雷达传感器网络的发展脉络与走向。

在上图虚线框中,一颗依旧保有4发4收链路和简单MPU的SAF86xx芯片不再进行完整的信号处理,而只是在做一些简单的FFT处理后,将FFT数据通过芯片本身的千兆以太网传输到S32R MPU上做后续处理。假设一辆汽车配备2颗长距雷达和4颗角雷达,那么总共就会有6根千兆以太网线连接到S32R MPU上做集中式处理,这样带来的好处是可以在软件层面上实现统一管理,方便后期的软件和算法升级。
恩智浦大中华区汽车电子事业部市场总监翟骁曙指出,之所以这样做,是因为“传统的雷达传感器分布在车辆的各个位置,各自为战,与ADAS域控制器、整车电子电气架构结合的并不紧密”。但随着新电子电气架构的诞生,怎样才能让雷达传感器更好的融入电子电气架构设计中去,使其更加合理,包括更合理地分配算力、后期更加方便地进行软件定义和升级,成为恩智浦思考的重点。
换句话说,恩智浦的思路是希望在新架构中,“雷达的前端感知与后端处理可以实现物理意义上的解构”——前端的雷达传感器变得更加简单,射频性能进一步提升,后端数据处理部分会更加趋向于ADAS域控制器或者是一个独立的雷达域控制器。
这样做的好处来自两方面:一是从整车电子电气架构的角度来看,算力分布将会更加合理,灵活性也会更高。因为随着不同的新型雷达技术的迭代,算力分配可以在进行OTA时进行动态调整,为硬件平台的寿命延续做到了尽可能的扩充;二是当更多的底层雷达传感数据被统一集中到中央雷达域控制器/ADAS域控制器上做统一融合处理时,能够实现更加强大的功能。
互联、灵活、可升级
让我们看一下在这样一套硬件支撑和新的网络构成下,汽车雷达可以实现哪些新的功能和拓展。
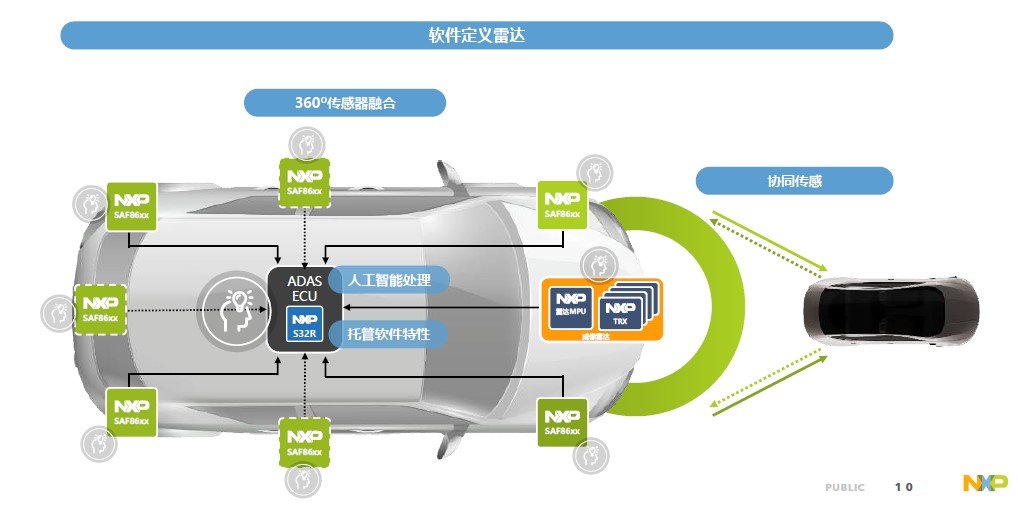
- 360º传感器融合
该功能的实现,主要依靠通过多颗SAF86xx+S32R系列MPU的组合。当前,边缘侧雷达传感器做了大量的雷达信号处理,它们向中央处理单元传输的信号非常抽象。这样做的好处当然是网络负载比较小,但不足之处是很多细节信息已经在前端被处理、被过滤了,当需要在中央处理节点进行数据融合的时候,由于缺少一些相对比较底层的信息,无法形成更加完整环境信息理解。
但如果在新架构下,随着更多底层信息被同步到了中央雷达运算节点,多路雷达数据的融合可以让整车周边的点云信息更加完整,这就是典型的分布式雷达网络的概念应用。
- 分布式孔径雷达
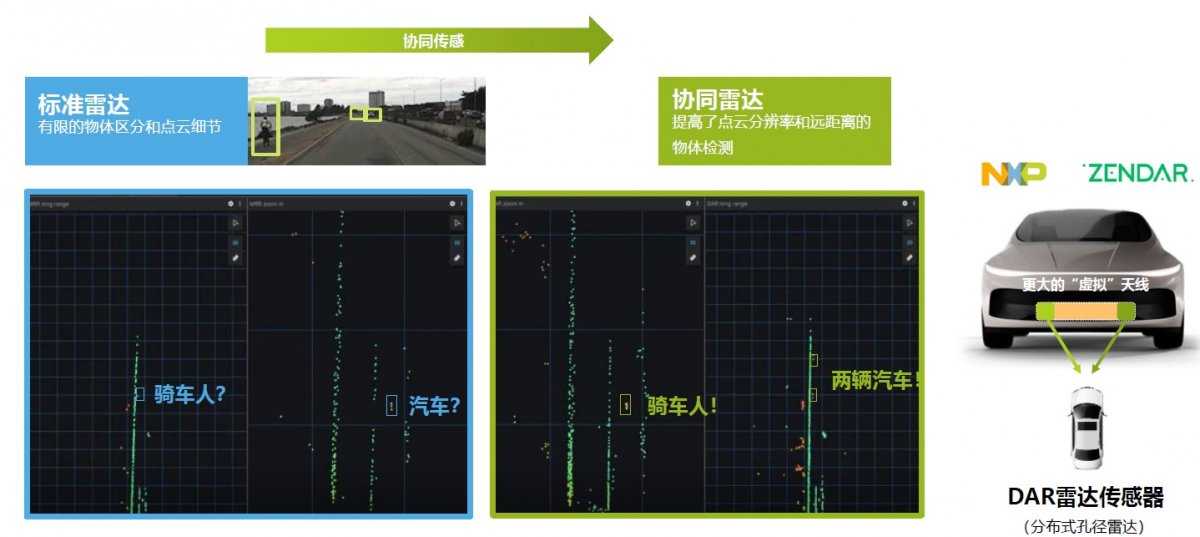
分布式孔径雷达的概念,是指将多个分散在车辆不同位置上的雷达传感器,通过软件的同步与协调,等效成一个更大孔径的天线,从而进一步提升车辆雷达系统的整体分辨率、和探测距离,以实现更好的雷达探测效果。
在与ZENDAR的合作中,下图左侧的标准雷达受限于探测分辨率和探测距离,无法对目标进行有效分辨,也很难分辨出相对较远距离上到底有一辆还是两辆汽车;相比之下,在分布式孔径雷达技术的加持下,车辆可以非常清晰地分辨出到底是一个行人还是一个骑车者,或者到底是一辆车还是两辆车?
- 利用人工智能提高物体分类能力
随着人工智能技术的发展,传统机器学习的一些上层算法已经遇到了能力极限,随着更新更先进人工智能算法加入到雷达后端处理中,可以实现更加智能化的功能、更加强大的目标识别、跟踪能力。也就是说,在传统机器学习的基础上,通过叠加人工智能,同样的基础雷达信号输入就可以做出更加智能化、更加精确的判断。但这样的功能通常无法在边缘侧实现,必须要将底层雷达信号全部集中到一颗强大的中央雷达控制器上才能成功。

在谈及4D毫米波雷达与激光雷达关系时,杨昌认为,目前28nm RFCMOS单芯片所拥有的毫米波收发和处理能力,完全能够满足整车厂2025年路线图规划以及更高级ADAS功能。无论是双级联还是四级联4D方案,已经接近激光雷达的处理能力,但成本只是激光雷达的一小部分,从很多零部件厂和主机厂的实际评估效果来看,四级联和双级联4D成像雷达在许多情况下是能够替代激光雷达的。
“这样的技术能力不但非常符合车厂降本增效的实际诉求,对当前重传感、轻地图的智能驾驶技术路线也起到了很好的支撑作用。“翟骁曙补充说,从商业角度来讲,车辆驾驶环境下的高清地图全覆盖,成本确实过于昂贵了一些。毕竟自然环境和城市建设总是在不断变化,实时更新高清地图不太现实,车辆完全依赖于未更新的高清地图完成自动驾驶肯定会导致安全风险,所以“重实时感知、轻地图”的自动驾驶技术组合是有其合理性的。这也是恩智浦不断推出高性能4D雷达芯片组、分布式串流传感器的原因所在。
- 如果能够解决下雨天等不良天气条件下的雷达检测问题,行车安全将进一步得到改善和提高。

