
先进驾驶辅助系统(ADAS)和自动驾驶技术在很大程度上依赖传感器,包括激光雷达(LiDAR)、常规雷达和摄像头。最近,随着越来越多的汽车配备先进的传感器系统,这些技术领域都取得了重大进展。
激光雷达传感器及解决方案
在开发ADAS和自动驾驶技术方面,激光雷达变得至关重要,因为它可以创建周围环境的3D地图,能够检测周围物体的空间位置甚至速度。
Counterpoint技术市场研究报告《2019~2030年全球自动驾驶乘用车市场》(Global Autonomous Passenger Vehicle Market 2019-2030)预测:到2025年,全球生产的新车中将有10%能够实现Level 3自动驾驶。Level 4自动驾驶车将最先进入美国和欧洲等已开发国家,尽管这些地区的Level 3车比例更高(需获得监管许可)。
Counterpoint认为,激光雷达在Level 3及Level 3以上车市中具有巨大的发展潜力,并将在2030年前同时进入大众市场。该机构还表示,激光雷达领域可望以65.9%的年复合成长率(CAGR)成长,到2030年,出货量将超过1亿台,市场规模将达到150亿美元。
激光雷达的主要发展趋势之一是4D激光雷达。除了3D定位外,4D激光雷达还能利用反射雷射,测量汽车到其他物体的距离,并将瞬时速度绘制成第四维度。这样就能让系统更详细地了解周围环境,以及环境内物体的运动,这是车辆和机器人等自主设备做出精确决策的关键因素。
Aeva是一家专门生产4D激光雷达传感器的公司,该公司最近发布了下一代4D激光雷达传感器产品(图1)。这款最新的Aeries II 4D激光雷达传感器,采用频率调变连续波(FMCW)技术,可以直接辨识每个点的即时速度和精确3D位置,实现了突破性的检测和感知力。
图1:Aeva的Aeries II 4D激光雷达传感器。(来源:Aeva)
FMCW技术本质上不受阳光直射、其他激光雷达传感器和反光镜重影的干扰。与传统的飞行时间3D激光雷达传感器相比,由于利用了额外维度的速度资料,这些传感器具有明显的优势,包括:
.功能范围更大:能够检测、分类和追踪汽车、自行车和行人等动态变化目标;
.超高分辨率:即时相机等级的影像,分辨率比传统飞行时间(ToF)激光雷达传感器高20倍;
.小物体检测:能够透过更加可靠地检测道路上的小物体来发现道路危险,检测距离可达传统激光雷达传感器的两倍;
.定位与导航:无需像IMU或内建4D定位的GPS这类额外的传感器,就能提供精确定位和导航,能以六个自由度(DoF)即时估计车辆运动。
Aeries II是市场上第一个采用片上激光雷达技术的传感器,在一个小型硅光子模组中,整合了所有重要的传感器组件,包括发射器、接收器和光学组件。得益于高整合度和无光纤技术,整个制造过程实现了高度自动化。
激光雷达技术的另一个主要趋势是,在硬件传感器中添加了人工智能(AI)算法,充分发挥软件组件的灵活性,进而增强系统的性能并拓宽应用范围。
AEye开发出一款4Sight智能传感器平台。这是一种软件定义的激光雷达解决方案,可利用人工智能,实现可以挽救生命的动态运输和移动应用。传统的被动激光雷达系统无法考虑不断变化的条件或平衡竞争性优先顺序,而AEye的这种自我调整激光雷达则不同,该雷达提供了高性能、软件可定义的解决方案,透过适当的裁剪,可以满足任何自主应用的各种性能和功能需求。4Sight系统非常灵活,可以适应各种市场、应用、使用案例、设置和天气条件。
大陆集团(Continental AG)基于AEye的4Sight智能传感器平台所建构的HRL131,可望成为业内首个进入汽车市场且批量生产的高分辨率、固态、远端激光雷达传感器。HRL131是大陆集团用于Level 2至Level 4自动档和自动驾驶应用的全堆叠汽车级系统的重要组成部分,它进一步完善了该公司包括雷达、摄像头和超声波技术在内的传感器套件,HRL131的扫描模式配置示例如图2所示。
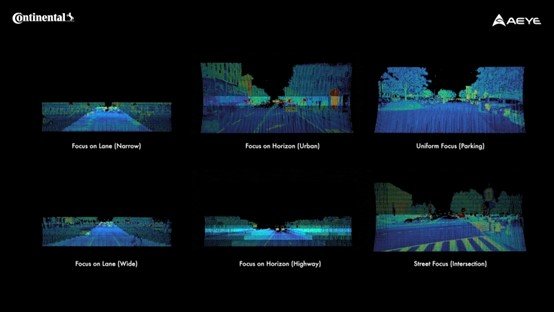
图2:HRL扫描模式配置。(来源:AEye)
雷达成像
利用无线电波探测和定位环境中物体的常规雷达,通常与包括相机和激光雷达在内的其他传感器一起,组成一个整体感知系统。目前常规雷达发展的趋势之一,是进一步提高分辨率和覆盖范围。这一点很重要,因为这样可以更详细地绘制环境地图,为ADAS和自动驾驶系统提供更精确的信息。
以色列Arbe最近推出了Lynx,一款用于自动驾驶车、具有革命性的360°雷达。之前,360°追踪往往依赖成像。而Arbe开发的这项技术,声称是业界第一个利用一套雷达即可实现对车辆整体环境进行人工智能分析的系统。
雷达在自动驾驶中至关重要,因为它可以辨识、分类和监视物体。透过即时撷取和处理数据,可以创建车辆周围自由空间的完整地图,并提供潜在的危险分析。这一功能是由雷达的“重叠”(overlapping)实现,它支援从一个单元到下个单元平滑地追踪感兴趣的物体,同时使用两种独立的感知算法验证它们的位置。因此,有些场景能够得到更好的处理,例如在壅塞的城市交通中行驶、安全地进入高速公路,以及留意空车道以备潜在的应急等。
与激光雷达的发展一样,还有一种趋势是,提供在单个芯片上高度整合的雷达解决方案。恩智浦半导体(NXP)的新型SAF85x即为一例,它是业界首个专为下一代ADAS和自动驾驶系统设计的28nm RFCMOS雷达单芯片IC系列产品。
这种单芯片系列产品,将高效能雷达检测和处理技术整合在一颗组件中,为Tier 1供应商和OEM提供了新的灵活性,可以解决短、中、远端雷达应用,满足当前和未来日益具有挑战性的新车评估计画(NCAP)的安全需求(图3)。

图3:SAF85xx雷达传感器支援短、中、远端雷达应用。(来源:恩智浦半导体)
SAF85xx整合了一个雷达收发器,工作频率覆盖整个汽车雷达频段的76GHz~81GHz,并内建基于Arm Cortex A53和M7核心的雷达微处理器以及SRAM。与上一代芯片相比,单芯片系列产品具有两倍的射频性能,并将雷达信号处理速度提高了40%,实现了角度雷达和前端雷达的4D检测。因此SAF85xx非常适合安全关键型ADAS应用,如自动紧急刹车、自我调整巡航控制、盲点监测、交叉路口交通提醒和自动停车。
摄像头
摄像头透过提供周围环境的视觉信息,来检测车道标线、红绿灯和其他车辆,因而成为ADAS和自动驾驶的重要组成部分。
除了分辨率越来越高外,摄像头发展的另一主要趋势是整合不同类型的传感器,也称为传感器融合(sensor fusion)。一个关键的发展领域是,在高不确定性或噪声较强的场景中整合传感器系统,包括激光雷达、常规雷达和摄像头。
透过整合来自多个传感器的数据,传感器融合可实现对环境的更全面了解。传感器融合对于ADAS和自动驾驶来说至关重要,因为它能够更准确地反映周围环境,从而使车辆做出更明智的决策。
(参考原文:LiDAR and radar advance for ADAS,by Stefano Lovati)
