
基于便利性、高效率和高精度,各类操作机器人将极大地造福制造业和工业部门。其中,随着电机轴的旋转,将能量输送到其他地方,并将动能转换为系统中某处的机械位置变化。电机轴的角度与机构运动部件的位置直接相关。各种条件下电机位置的定位功能,将有助于维持系统受控性,还可防止意外动作,减少系统损坏或人身伤害。
通过利用安装在电机轴上的磁体,为磁性编码器提供输入,就可以实现非接触式角度编码。磁场不受灰尘或污垢的影响,将此类解决方案集成到电机中,可实现紧凑解决方案。编码器可以跟踪呈自然正弦曲线和90度相位差的旋转磁场分量。借助这种关系,并利用这些输入的反正切,可以快速计算角度位置。
当磁体在电机轴上旋转时,磁阻和霍尔效应传感器可以检测到不断变化的磁场。3D线性霍尔效应传感器,不仅能够计算角度位置,还能够对温度漂移、输入幅度失衡、器件灵敏度和偏移进行补偿。
除了信号链误差之外,机械公差也会影响磁体的旋转,这反过来又决定了检测到的磁场的质量。为实现最佳性能,通常需要通过多点线性化或谐波逼近,来实施最终校准过程。一旦对机械误差源进行了校准,磁编码就可以实现很高的精度。
位置计算
观察两个相位差90度的等幅正弦输入,并利用这些信号执行反正切计算,就可以跟踪电机的绝对角度。
下面所列为计算角度位置的一些技术:
·一维霍尔效应传感器
·三维霍尔效应传感器
·各向异性磁阻传感器
·巨磁阻传感器
·隧道磁阻传感器
·电感式传感器
·光学编码
·步进电机脉冲控制
·无传感器电机控制
步进电机脉冲和无传感器电机控制不提供绝对位置反馈,而是根据相对于起始位置的变化来估计位置。故当系统断电时,必须通过其他方式来确定电机的实际位置。
对于上面列出的其余技术,都是由角度编码器利用相位差90度的两个正弦波,来确定精确的角度位置。
其中光学编码器提供的精度最高,但通常需要笨重的外壳来保护传感器和光圈免受灰尘、污垢和其他污染物的影响。此外,编码器的机械元件也必须耦合到电机轴。当转速高于编码器机械额定值时,可能会导致无法修复的损坏并导致停机。
霍尔效应传感器和磁阻传感器等磁感应技术,利用固定在电机轴上的磁体,从而不再需要任何机械连接。与永磁体相关的磁场可以扩散到磁体周围的区域,这为传感器的放置提供了广泛的自由度。旋转磁体的磁场矢量分量间的相位差自然相差90度,因此,单片多轴磁传感器利用单个器件即可完成角度编码。磁传感器的方案紧凑、较高的放置自由度以及非接触特性,使其对角度编码应用极具吸引力。
电感式传感器的工作原理与磁性解决方案类似,通过耦合电感线圈产生的交流磁场,在附近的金属目标中产生表面涡流。目标的接近度变化会导致系统有效电感的变化,从而与特定目标一起使用时,可以产生正弦和余弦输出。
在3D霍尔效应传感器(例如TMAG5170)上方旋转的磁体产生的理想输入,如图1所示。

图1:同轴磁体旋转使霍尔效应传感器能够计算角度位置。本文资料来源:德州仪器
假定安装布局合理且没有机械公差,则利用输入的反正切值来进行计算,即可得到实际的电机角度,如图2所示。但实际应用中,有几个机械误差会影响磁场输入的质量,这些机械误差组合起来,将会导致电机角度误差,具体取决于每种机械误差的大小程度。
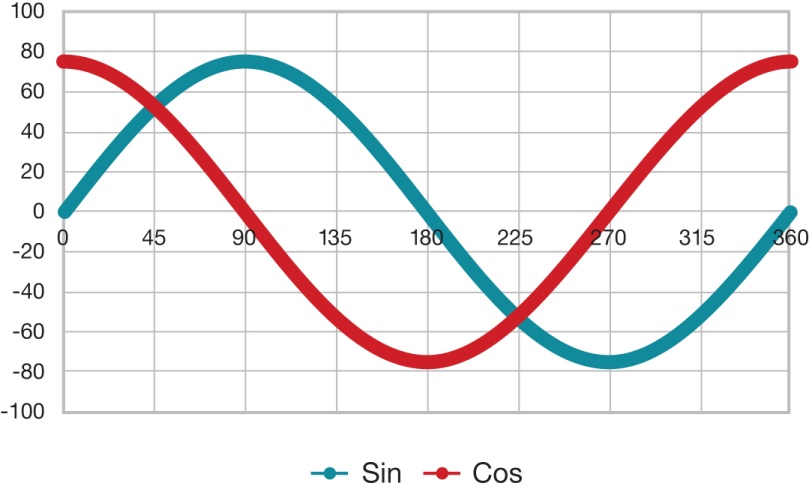
图2:为实际电机角度提供了完美计算的理想正弦和余弦输入。
以下几种装配误差将对性能带来影响。其中,同轴对准误差往往是最宽容的。但由于传感器位置和磁体几何形状不同,每种错误导致的影响是有差异的。
1.磁体倾斜
如果磁体安装没有完全垂直于电机轴,那么磁体在旋转过程中会出现摆动。磁体的有效XYZ空间坐标与传感器的对准不一致,将会导致角度测量出现非线性。见图3a及图3b。
2.磁体偏心
在磁体旋转过程中,磁体相对于传感器的位置会不断变化。由于来自磁体的磁通密度与距离的平方成反比,因此这种效应会产生显著的非线性。磁体的偏心可能是由于磁体与轴的旋转轴线没有对准而引起。见图3c。
3.系统性位置偏移
位置偏移后,输入磁场分量的幅度和相位会出现意想不到的变化。这些误差同样会影响最终的角度计算值。见图3d。
4.电机轴倾斜
电机轴倾斜会导致输入信号相位误差,大小取决于参与敏度计算的磁体和轴的倾斜度。当利用反正切进行计算时,这种相位误差会产生非线性。在这种情况下,磁体不会摆动,但传感器的正交性会丢失。见图3e。
5.传感器焊接错位
这种情况与电机轴倾斜非常相似。在回流焊期间,在焊料凝固时,任何器件都可能无法完美对准。这种错位可能导致封装沿任何轴倾斜,从而导致输入可能出现幅度或相位误差。见图3f。
(a)
(b)

(c)

(d)

(e)
(f)
图3:几种失准误差示意图。
机械误差校正
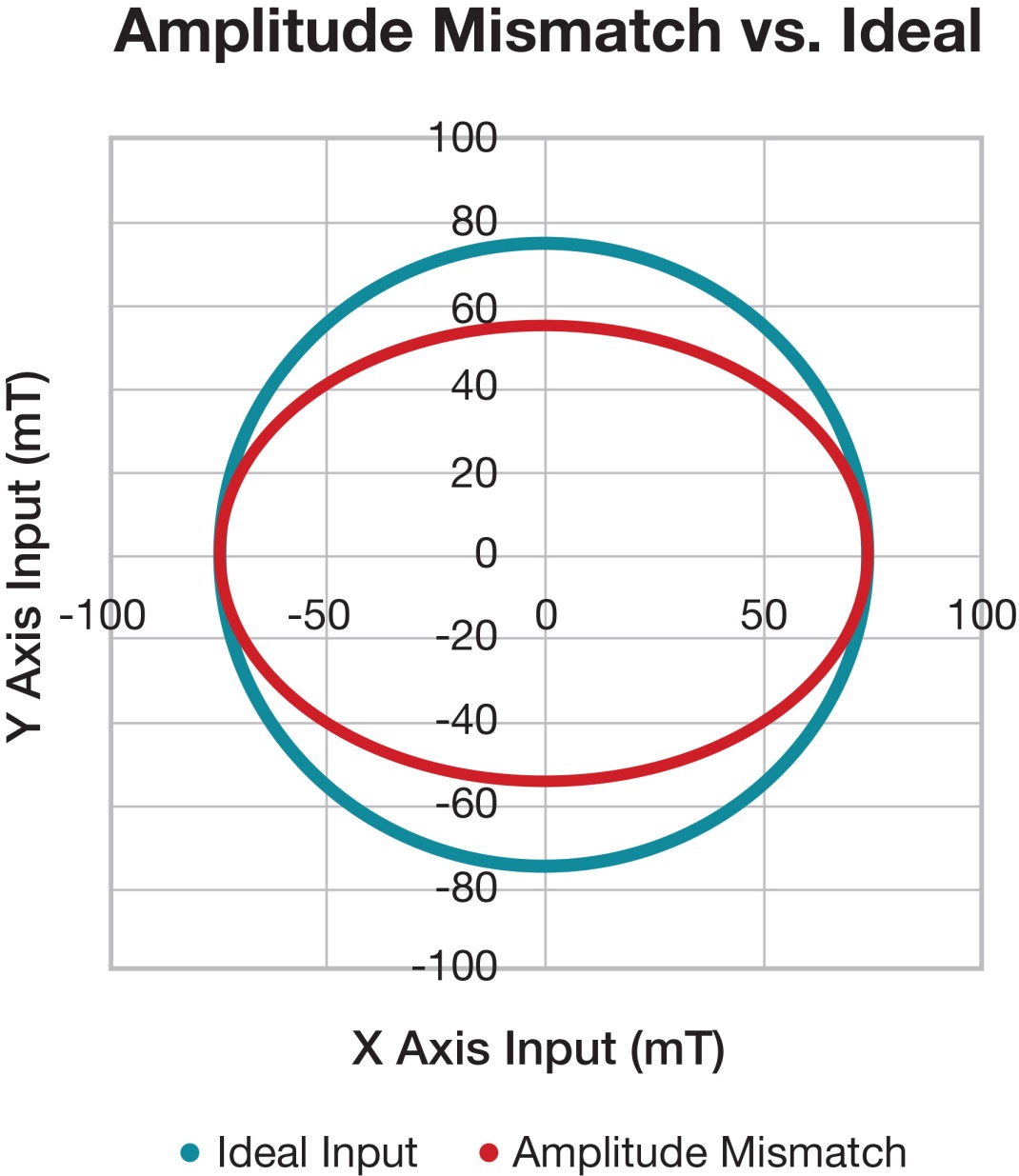
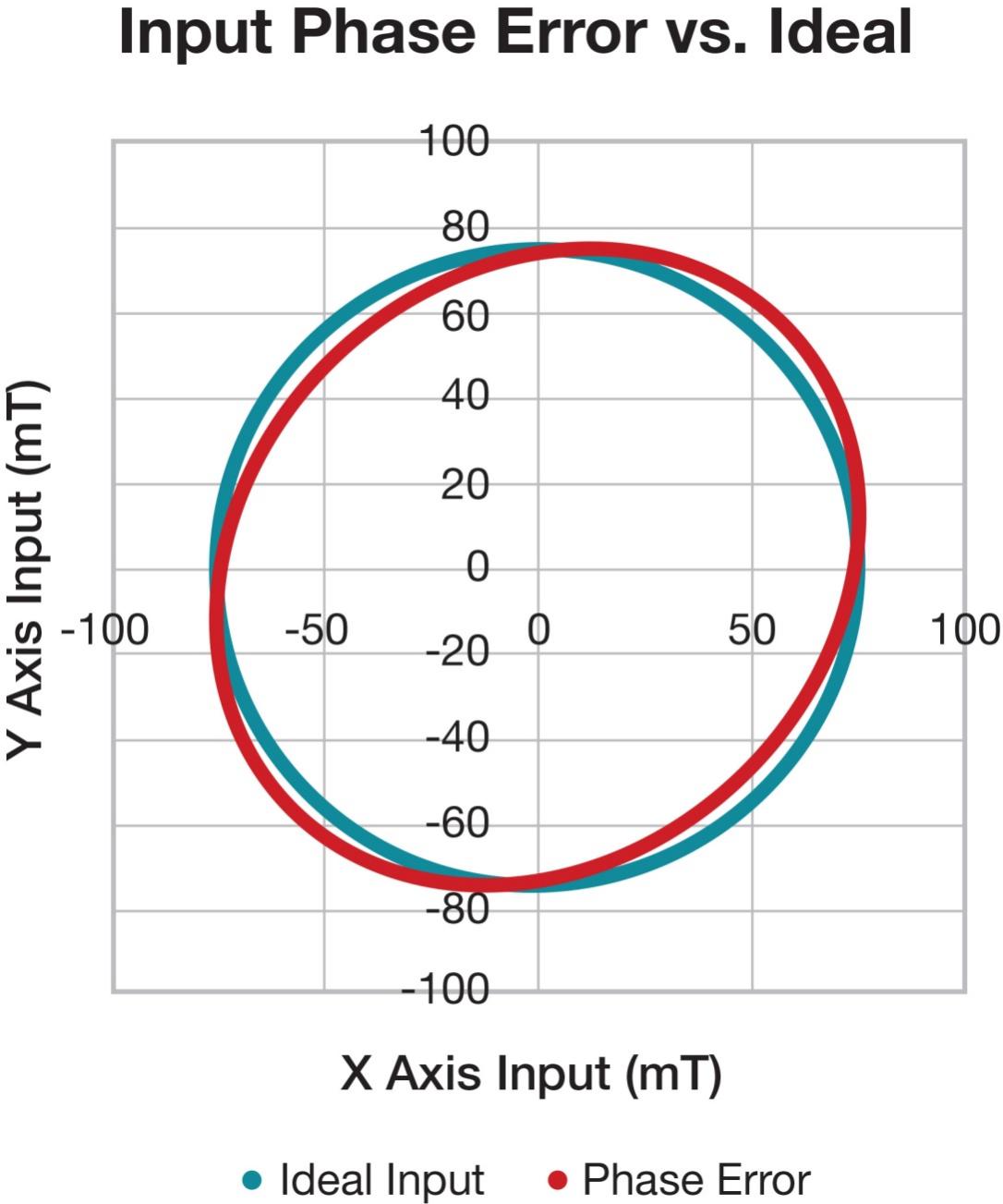
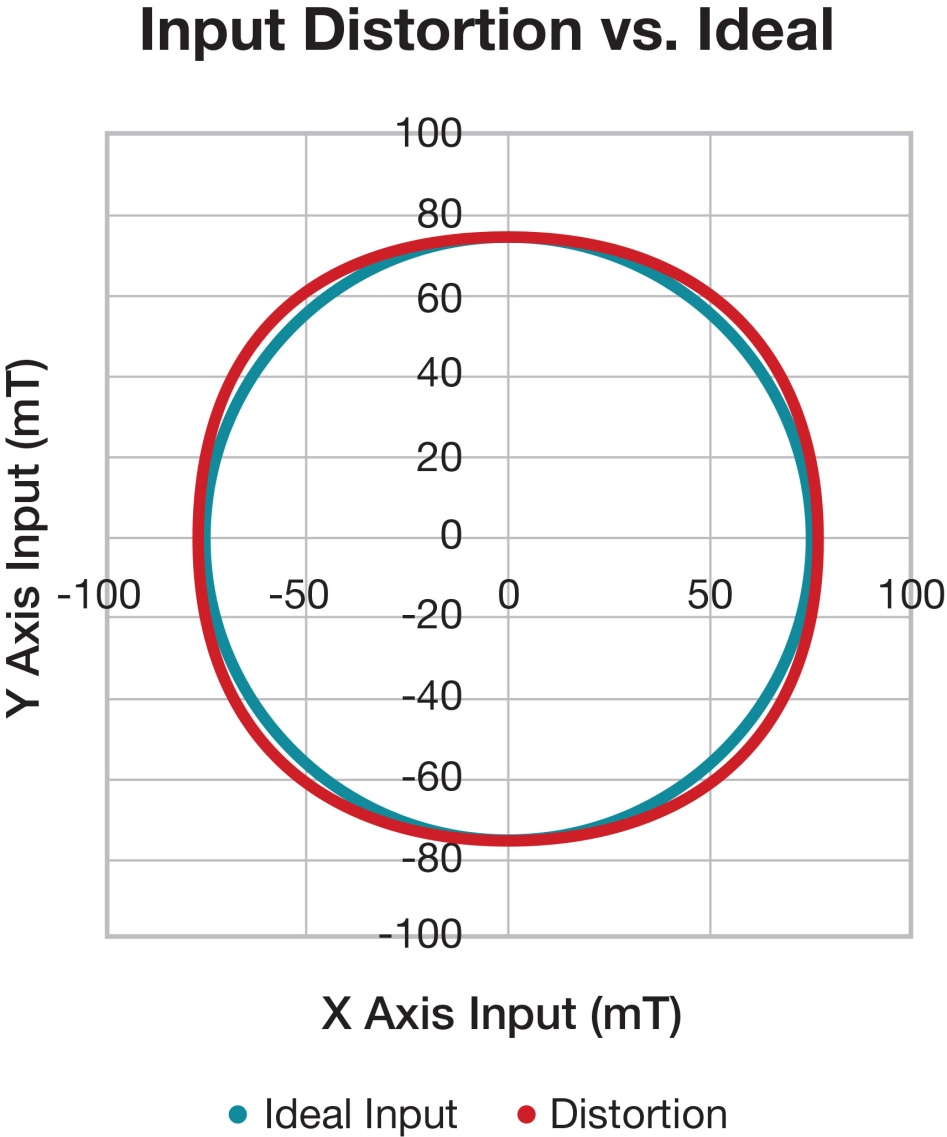
图4显示了与以原点为中心的理想圆相比之下各种非线性误差的简化示意图。这些图表达了在绘制两个输入信号相互对比时各种误差的可能影响。
(a)

(b)
(c)
(d)
图4:a-理想输入和幅度失配比较 b-输入偏移和理想输入之比较
c-理想输入和相位误差之比较 d-输入失真和理想输入之比较
在公式1中,θ'表示计算得到的角度。与理想90度的相位误差表示为σ。A(θ)和B(θ)是在理想情况下的等效函数,但也可以用来表示简单的标量幅度失配或由磁体旋转缺陷引起的幅度周期性变化。改变幅度会导致失真,进而对角度线性度产生不利影响。
θ’=atan(A(θ)sin(θ+σ)+offsetsin)/(B(θ)cos(θ)+offsetcos) (1)
取θ和θ'之间的差值可以计算出周期性重复的绝对角度误差。图5所示为未校正误差,产生原因是传感器未放到轴心,从而捕获的输入信号幅度失配。

图5:非理想磁体输入引起角度误差。
相反,如果将传感器放置在轴上并对准,则任何幅度失配都将最小化,并且校正前的误差将具有较小的峰值。
幅度失配是由于传感器放置在磁场内造成的,但也可能受到传感器的灵敏度增益误差的影响。归一化输入幅度的方法有两种,一是调整通道灵敏度,或者在后处理中应用标量。
信号链和观测磁场中的补偿都需要对受影响的输入信号进行校正。执行这两种校正可立即提高总体精度。
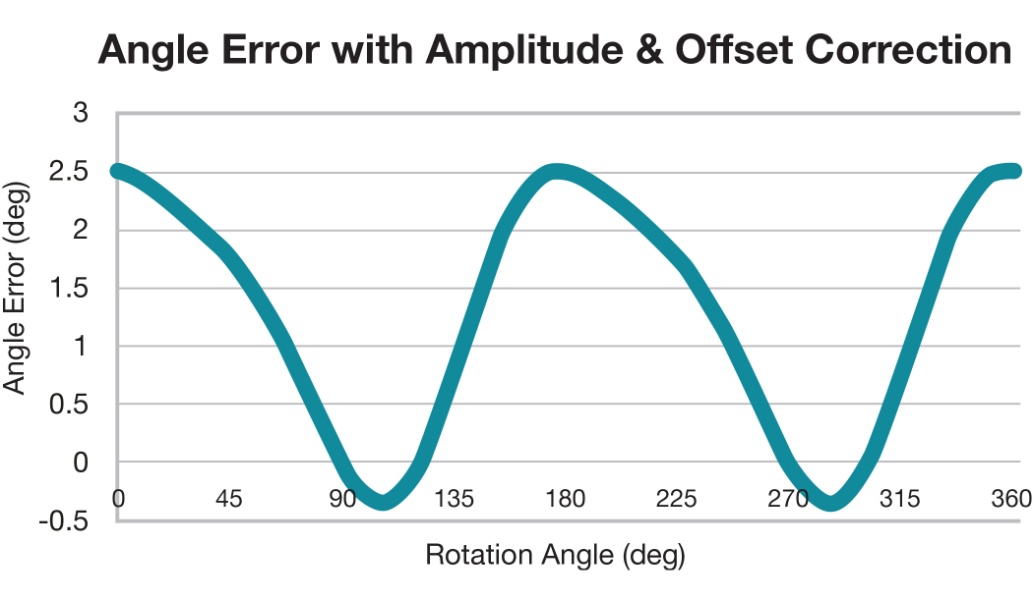
图6:机械误差源可引起残留角度误差。
在解决幅度和偏移误差之后,剩余部分就归因于相位误差和失真了。通常由机械错位引起的此类误差在不同系统之间往往是独一无二的,并且更难以直接校正。
校正方法
实施最终校准有两种常见的方法:多点线性化或谐波逼近。这两种方法中,都需要根据已知参考捕获多个数据点,方能有效计算这种周期性误差。
多点线性化方法中,每个收集到的数据点之间的变化被假设是线性的。增加样本数量会降低这种近似的不确定性。可以考虑利用4个、8个、16个或32个线性化点来校正图6所示的残留误差。对于图6所示的误差,利用32个点校正后,所有位置的残留误差都远低于0.1度,效果见图7。
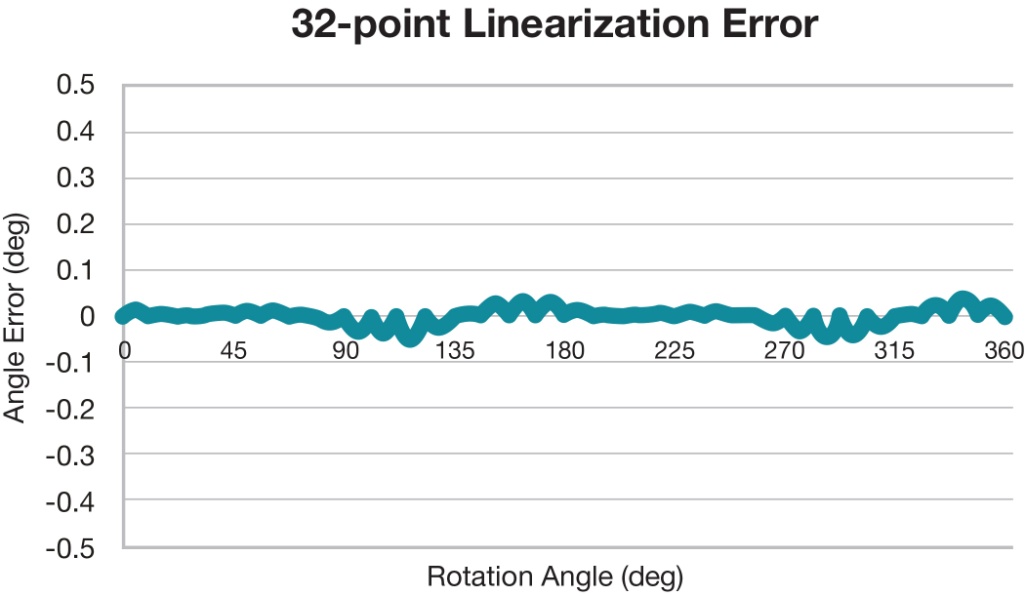
图7:利用32点线性化方法完成的残留误差校准。
而谐波近似是一种更先进的方法,它意识到了误差的周期重复性质。总误差为谐波的无限组合之总和,见公式2:
θcorrection=∑ni=1αicos(i*θ)+βisin(i*θ) (2)
随着用于校准数据点数量的增加,可以更准确地确定每个谐波的标量α和β,从而实现比多点线性化更高的精度。
因此,与利用分段线性化方法不同,对于图6中误差的校正,仅减去前4个谐波,即可使所有位置的误差都小于0.01度,结果见图8。
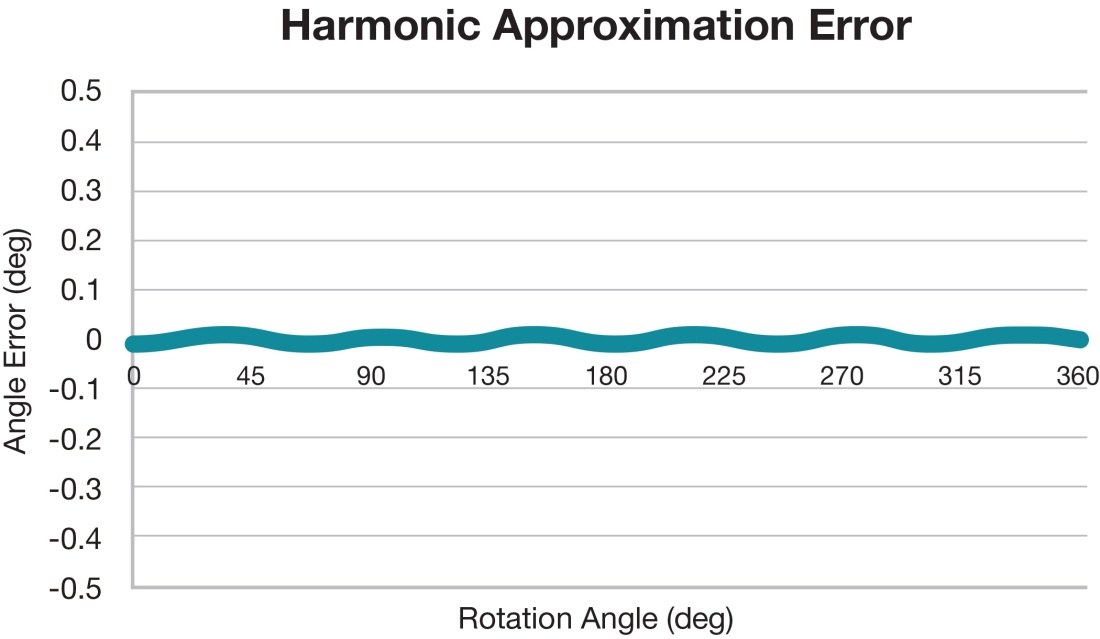
图8:利用谐波逼近方法的误差校准结果。
结论
磁性角度传感为微处理器提供角度信息,减少了可能导致系统故障的机制,因为无需用机械方式直连到电机轴。无论设计如何精细,也总会存在一些系统容差。故任何磁感应解决方案,都存在可能的失准误差,以及导致周期性角误差的信号链误差。所有未经校准的误差源叠加起来,就会导致精度无法接受。此时,欲实现电机位置的最高精度,多点线性化或谐波逼近是最直接且有效的方法。
(参考原文:Magnetic position sensing for precision control in robotics )
本文为《电子工程专辑》2022年7月刊杂志文章,版权所有,禁止转载。点击申请免费杂志订
