
机器视觉是许多现实世界应用的重要功能,让机器能够感觉和感知它们周遭的世界。一家美国新创公司SiLC Technologies推出了Eyeonic视觉传感器,锁定更广大的市场,提供同调视觉(coherent vision)和芯片级整合解决方案。SiLC的最新视觉传感器,是通过提供双极化强度信息,将激光雷达(LiDAR)性能提升到一个新水平,同时号称能避免多使用者与环境干扰。
各家车厂正在为新一代车辆导入越来越先进的ADAS解决方案,目标是在某天实现Level 4自动驾驶──也就是车辆能在没有驾驶员干预的情况下执行所有驾驶功能。另一个具挑战性的应用是自主机器人,以机器视觉引导机器人在仓库穿梭,能作为改善物流链、避免其行进路径上任何障碍的一种方法。
机器视觉解决方案需要先进的传感器,以取得实时性的行为数据,并在韧体或硬件层级进行处理,提供高阶信息给决策制定的算法(最终是以AI为基础)。适合车用与机器人机器视觉应用的传感器技术案例,包括雷达和LiDAR。SiLC开发的新型LiDAR技术,是仰赖同调传感器为车辆、机器人和工业应用实现4D视觉。
Eyeonic视觉系统
在2021年12月发表,并于1月份CES 2022亮相的Eyeonic视觉传感器是一种调频连续波(FMCW) LiDAR,不仅可提供深度信息,还可提供速度和极化强度数据。SiLC业务开发暨营销副总裁Ralf Muenster接受《EE Times》采访时表示:“其创新在于这是第一次,有人真正把所有实现同调视觉传感器的光子功能,整合在单一芯片中。”
该Eyeonic传感器(如图1所示)是以FMCW方法为基础,在技术上比传统LiDAR更复杂,但提供了额外的功能性,以及将系统缩小至芯片等级的能力。Eyeonic号称是首款实现商用的芯片整合FMCW LiDAR传感器,占位面积小、并能满足最严格的低成本和低功耗指标。
SiLC的Eyeonic传感器不同于其他类似的竞争解决方案,后者往往需要2颗、3颗甚至是4颗芯片,并要求它们链接某种耦合光学组件或光纤。Muenster表示:“此外,每次这么做都会损失3-10dB,这实在是难以承受,因为光子很珍贵,你不会想浪费它们。”
Eyeonic与传统LiDAR传感器的另一个显著区别,是在系统层级上用以该组件安装的技术。目前的3D视觉系统是透过使用飞行时间(time of flight,ToF)技术,仰赖波长为905纳米的高功率激光和高灵敏度的探测器;这些早期版本技术已经取得足够成功,实现在自动驾驶车辆实验中的早期部署。然而,昂贵的制造程序限制了它们的分辨率以及具成本效益之微缩;此外,人眼安全性议题则限制其应用范围,同时多使用者串扰(multi-user crosstalk)可能会限制其获得广泛采用的机会。
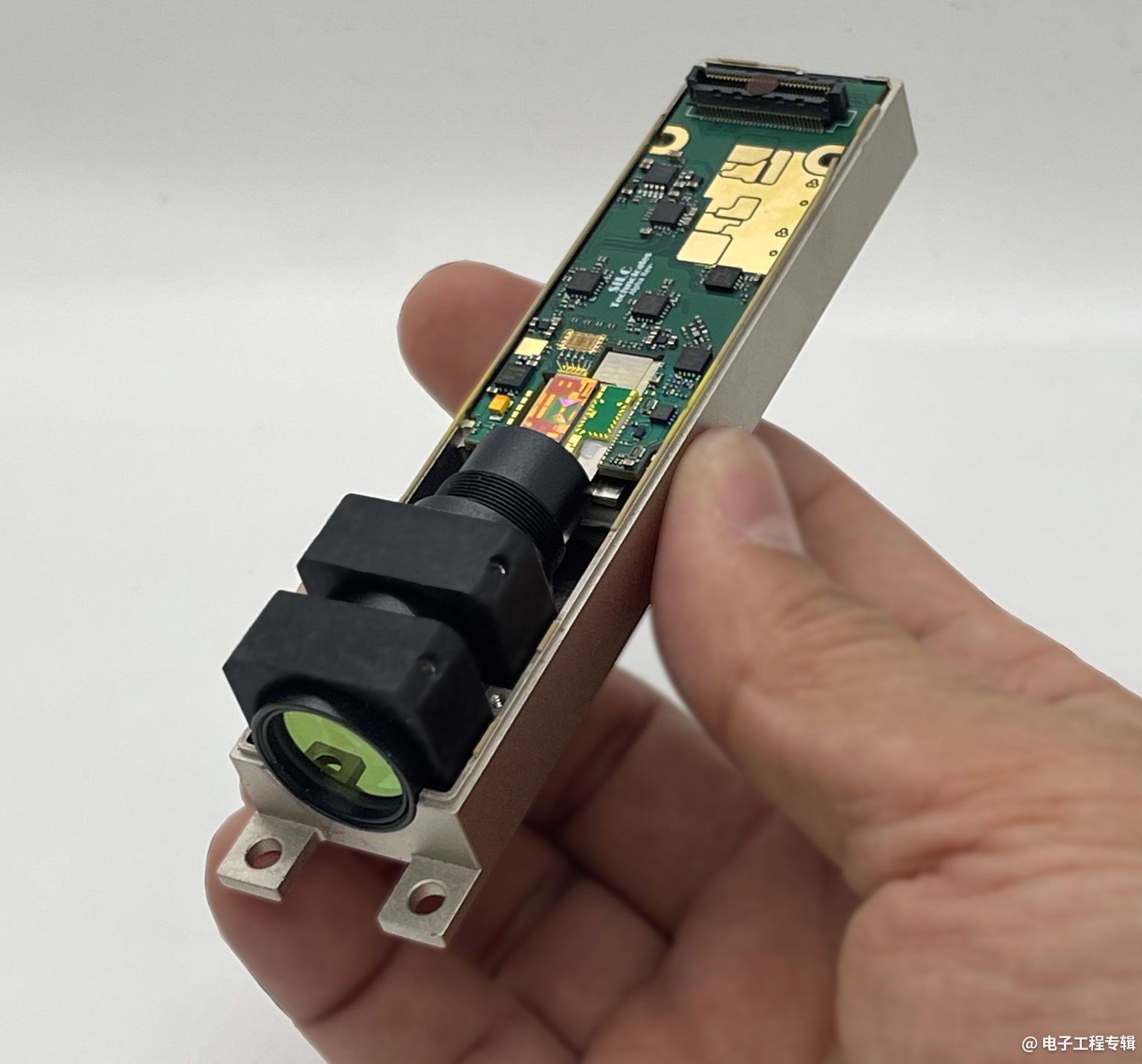
图1:Eyeonic传感器内部细节;该传感器在硅光子芯片上整合了超低线宽激光、半导体光学放大器、锗(Ge)探测器和光学电路(即波导)仪表。
(图片来源:SiLC Technologies)
基本上,以ToF为基础的传感器会发射传输一个或多个激光脉冲,等待它们弹回到探测器,然后计算往返时间;精确度或多或少可达到1公分,或着大多数是几公分。Muenster表示:“有些人对ToF很着迷,因为950纳米波长需要的CMOS探测器易于制造且成本低廉。然而,这个解决方案需要多个芯片,必须非常仔细地对准。”
但为了因应人眼安全相关法规,并允许在几乎没有多使用者干扰的情况下大量部署,转向1,550纳米波长的FMCW技术已经被广泛认可;不过,因为成本支出所需零组件数量等因素,这种方法过去并未广泛使用。
根据SiLC的说法,该公司的硅光子整合平台是一个具成本效益的解决方案,能采用现有的半导体工艺,将需要的所有高性能零组件整合到单一硅芯片中;从而实现低成本、尺寸小巧、低功耗的解决方案。硅工艺使得一些复杂的设备与技术,能够以低成本扩大量产规模。
FMCW是一种被广泛应用于以同调都卜勒(coherent Doppler)架构为基础之雷达的技术;FMWC会持续发射脉冲,在脉冲返回时计算发射和接收之间的频率差(即偏移)。由于都卜勒效应,该偏移是测量(反射)物体距离和速度的函数;这也就是同调激光的运作原理。

图2:利用极化强度可实现材料识别与表面分析。
FMCW具有一系列优势,首先是可以在任何光线条件下工作,并且不受环境干扰和串扰的影响;这意味着它不能透过用镜子反射阳光到传感器的中心的方法来破解。即使在远距离,其精确度也非常高(达到毫米等级),并且可支持长距离探测。
FMCW的另一个关键要素是,它比ToF所需要的功率要小得多,就能实现相同的探测距离。由于其同调特性,Eyeonic传感器增加了对目标速度进行瞬间测量的能力,成为真正的4D传感器。而且除了芯片整合,SiLC还提供双极化强度,可实现材料识别和表面分析(如图2)。
Muenster表示:“速度量测让机器视觉系统能够绘制待测物体周遭的轮廓,极化强度则可以帮助判别物体是什么。因为有速度向量,就可以知道物体接下来会在哪里,不必用到机器学习和神经网络训练来推论这些信息。”
SiLC的解决方案也不挑扫描仪(scanner),能与各种类型的扫描仪共同运作;帧速率(frame rate)和分辨率是完全可配置的,取决于具体应用。
Eyeonic传感器提供配备光纤引线(fiber-pigtailed)以及和无光纤两种配置;前者透过支持FMCW LiDAR收发器和扫描单元在不同位置的配置,来实现设计灵活性,后者则能实现最低成本的小巧尺寸配置。
SiLC的Eyeonic视觉系统预计从2022年第二季开始提供给策略伙伴客户,将是一个能让系统整合商与终端用户简单、快速进行评估的完整视觉系统。它会是市场上一个尺寸小巧、功能强大的FMCW LiDAR系统,具有一系列配件,以因应各种各样的客户应用。
责编:Judith Cheng;
(参考原文:FMCW LiDAR Empowers 4D Vision in Robotics and Autonomous Vehicles,By Maurizio Di Paolo Emilio)

