
当前,中国的自动驾驶渗透率和商业化步伐正在加速,新的风口也正在形成。一方面。L2+级别的自动驾驶规模量产不断猛增,并逐步向L3级过渡;另一方面,高级自动驾驶的商业化应用也正在干线物流、港口、矿山等特定场合逐步展开。在自动驾驶多点开花的背后,作为感知层的重要组成——车载雷达,也从幕后站到了聚光灯下,成为备受关注的热点。
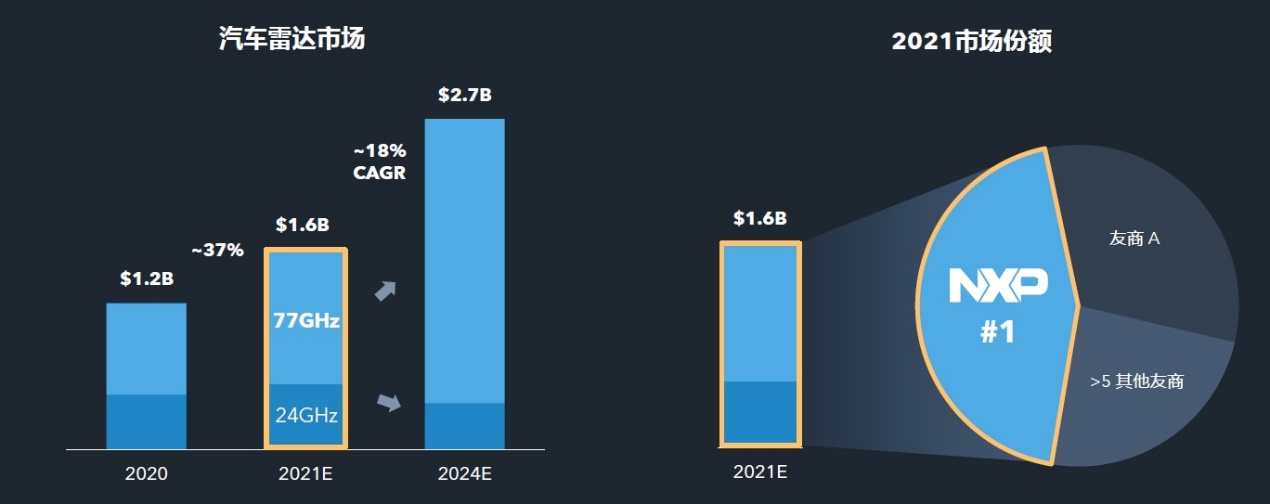
雷达传感器是无人驾驶汽车的眼睛,其分辨率、探测精度、安全性和可靠性将对智能交通的发展和自动驾驶的商业化进程起到举足轻重的作用。Yole Développement数据显示,2021年全球汽车雷达市场已经达到16亿美元的规模,同比增长37%。从2021~2024年,预计还会以18%的年复合增长率快速成长,到2024年汽车雷达市场规模将达到27亿美元。市场份额方面,恩智浦半导体排名第一,全球前20大汽车OEM都采用了恩智浦的雷达技术。
从应用场景来看,L1级别目前需要实现自适应巡航控制(ACC)或者自动紧急制动(AEB)功能,这样的系统通常搭载1颗前向长距离雷达与摄像头组合,后向功能中的盲区检测(BSD)、变道辅助系统(LCA)等功能则需要2颗后角雷达;到了L2级别,通常需要再额外多加装两颗前角雷达,以实现前向横穿预警、带转向的AEB、自动泊车等功能,并与数颗摄像头(≥4)一起实现360度车辆环视。
在L2+/L3以上级别,摄像头(6-8)和雷达传感器(5-10)的数量会进一步增多,对传感器性能的要求也大幅提升。例如在L1、L2级别时,前向雷达只需具备辨别车辆或行人的能力即可,而到了L3+级别时则需要包括4D成像雷达在内的更高性能的雷达产品。

发力4D成像雷达
“目前雷达市场有两大重要变化:一是毫米波雷达技术从之前的SiGe转型到RFCMOS,第二个关键变化是24GHz传感器正被77GHz传感器取代。”恩智浦全球副总裁,ADAS产品线总经理Steffen Spannagel日前对《电子工程专辑》表示,恩智浦从一开始就关注77GHz技术,其第二代裸芯片组即是行业首款77GHz PLL,并且从第四代汽车雷达芯片组开始就过渡到了RFCMOS技术。
目前来看,L2+(有条件的自动驾驶)和L3-L5(高级/完全自动驾驶)是对恩智浦最具吸引力,也最具前景的自动驾驶级别。仅以L2+级别为例,到2030年约有43%的乘用车都能够支持L2+技术,加之传感器的数量和性能的不断提升,这也成为4D成像雷达最主要的使用场景。
所谓“4D成像雷达”,通俗地讲,就是与现有的传统毫米波雷达相比,其在水平和俯仰方向上的分辨率得到了极大提高,可以在任何光照或天气条件下,将雷达的功能从测量距离、速度、水平方位角扩展到涵盖距离(Range)、方位(Azimuth)、俯仰角(Elevation)和相对速度(Velocity)的测量,显著增强了雷达的性能。
如果用数字加以定量描述,4D成像雷达可以实现超过300米的探测距离,可以在水平和俯仰方向上达到小于1度的分辨率,输出类似激光雷达的点云。也就是说,4D成像雷达可以用很高的分辨率去探测物体的距离、速度、水平角度和高度,并通过点云对环境和目标的轮廓进行描述并分类,从而满足L2+ ADAS系统的需求。
当然,也只有这样,它才能够不仅可以“理解”水平面,还可以“理解”垂直平面,真正把前方探测到的物体轮廓大概描绘出来,从而帮助车辆判断是在物体“下方”还是“上方”行驶。
在CES 2022展会上,恩智浦展示了由多颗级联TEF82xx雷达射频芯片,并结合S32R45或S32R41雷达处理器芯片所构建的4D成像雷达方案,可实现360度环绕感知,从而满足L2+级至L5级的自动驾驶需求。该方案最大的亮点在于率先提供了短距、中距、长距三合一的并发多模雷达感测,可实现对汽车周围宽广视场的同时感测。为了达到这个目标,恩智浦利用创新架构,通过配置低复杂度传感器实现了192个虚拟天线通道,来提高原始传感器硬件的性能。

尽管4D成像雷达是恩智浦力推的产品,但Steffen Spannagel并不认为仅靠摄像头、激光雷达、4D成像雷达中的一种方案就能一统天下。“不存在一刀切的传感器市场,因为自动驾驶级别不同,市场也有很多细分。“他说,恩智浦的看法是摄像头和雷达会共存,因为它们的优缺点互补性非常强;成像雷达未来可以降低或取代激光雷达的使用,虽然目前还处于发展阶段的早期,但随着性能的增强,理想情况下最终将能够取代激光雷达。
当被问及“随着越来越多的汽车配备更强大的雷达传感器,这将给OEM和Tier 1供应商带来哪些挑战时?”Steffen Spannagel回应称,这的确是一个不容忽视的问题,一个最直接的技术挑战,就是如何处理雷达传感器之间的信号相互干扰?同时,如何确保系统的可扩展性也是OEM和Tier 1供应商非常看重的一点,毕竟车载传感器的种类、数量、性能、使用场景都不相同,一个出色的可扩展平台将能够很好的提升芯片厂商服务客户的能力。
聚焦中国市场
“恩智浦将中国市场看成是我们非常关键和重点的一个雷达市场。”恩智浦全球市场与销售副总裁,大中华区汽车电子总经理刘芳表示,自2016年开始,从中国的Tier 2到主机厂,以及如今越来越多辅助驾驶、自动驾驶和汽车电子电气架构的升级上可以看出,中国已经越来越接近甚至在某些领域超越了全球技术研发的创新能力。而恩智浦在这一大环境下进行了全力配合,提供了许多技术支持和产业思考层面的赋能,以此帮助合作伙伴能够更加快速地与国际同步,甚至将其应用实践领先于国际。
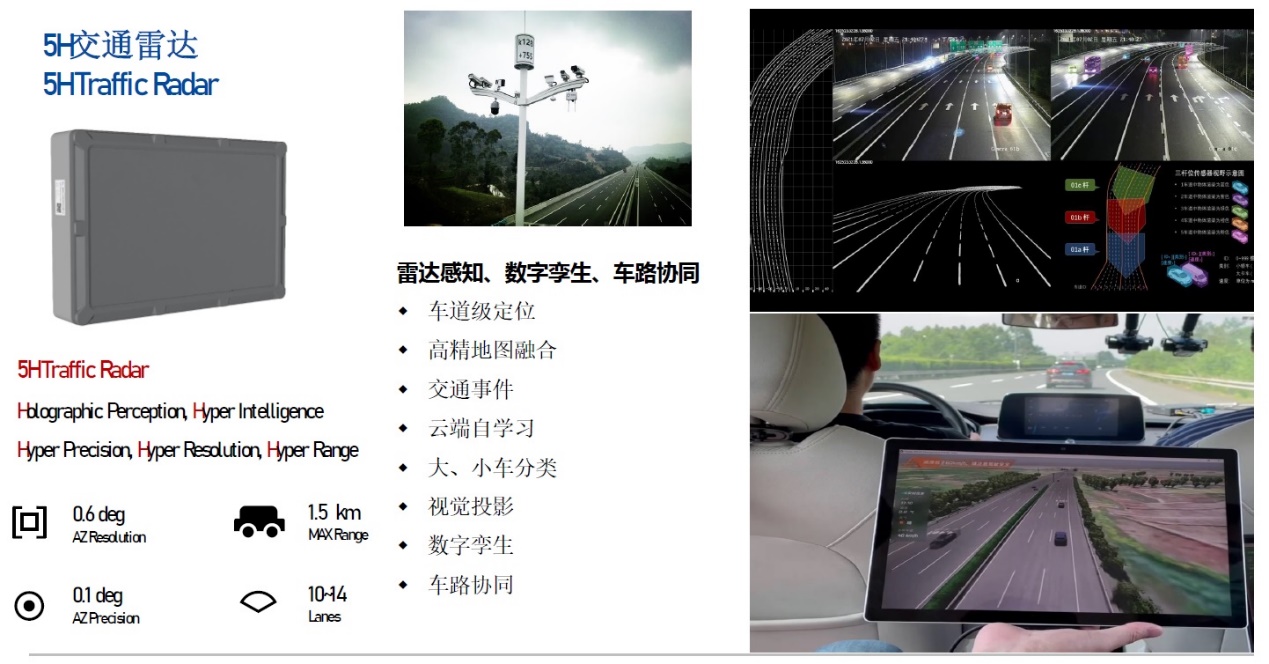
恩智浦的合作伙伴之一,南京隼眼电子科技有限公司基于恩智浦毫米波雷达芯片进行了大量专用设计,完整地输出了包括前向雷达、前角雷达、后角雷达和成像雷达等在内的多种毫米波雷达解决方案。隼眼科技CTO张慧提供的数据显示,基于恩智浦的先进芯片,隼眼科技通过单芯片就可以实现高达300米的探测距离和优于0.1度的角精度。而在5H交通雷达(即全息感知、超高智能、超精、超分辨和超距离)方面,采用多片级联的恩智浦前端解决方案,实现了超过1500米的检测能力,角精度优于0.1度,角分辨率优于0.6度,可以同时覆盖10-14个车道,代表了业内领先水平。
华域汽车系统股份有限公司电子分公司、技术中心执行总监石磊,将华域4D雷达技术的优势归结为“三高”——高度探测、超高灵敏度和高分辨率。目前,基于恩智浦雷达技术,该公司拥有2大产品系列:一是于2020年4月基于恩智浦S32R29平台推出的LRR30两片级联成像雷达,二是基于恩智浦S32R45平台正在开发的4片级联成像雷达LRR40,可以达到350米的距离,水平和俯仰实现1度和2度的分辨率,FOV可以进一步扩展到±75度,盲区可以进一步缩小。
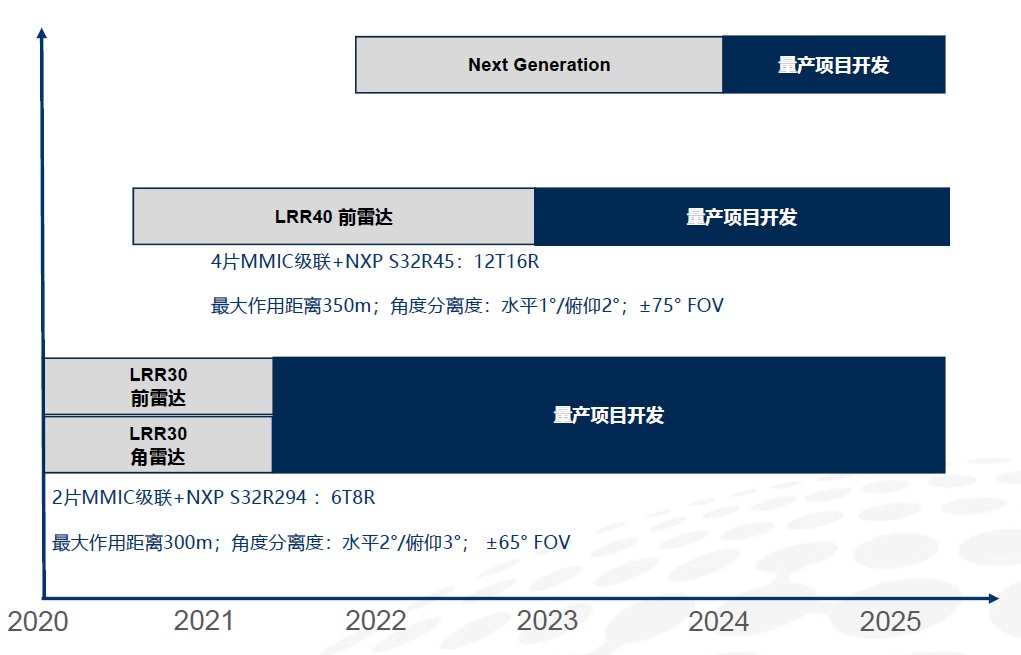
华域4D雷达产品
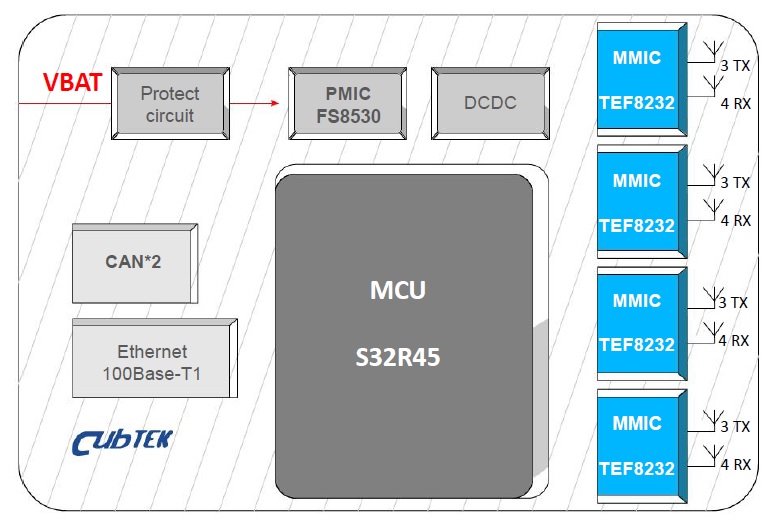
为升科科技股份有限公司也是恩智浦合作伙伴之一。根据CTO蔡青翰的介绍,与恩智浦合作开发的高角度分辨率雷达可得到小于1度的水平角分辨率,以及小于2度的垂直角分辨率,通过角分辨率的提升,使得雷达侦测距离大于300米、输出数据速率达到20FPS,并使雷达每秒提供8万个点云。同时,一些比较新颖的算法,如先进的大规模MIMO算法、超级分辨率算法、干扰抑制算法等,也为高分辨率指标的实现增色不少。
“在合作伙伴的选择上,我们并不热衷于通过追逐热点和明星企业的光环来获得市场的高关注度,而是更看重具有技术能力、创新性,同时在商业上具备基础的合作伙伴,再根据产品的不同阶段、性质和定位共同导入新产品,并展开深入地协作。”刘芳说。
比如,针对一些新导入的产品,恩智浦会更加专注地寻找能补足产业链上痛点和缺口的合作伙伴,更看重合作伙伴在系统软件、设计模组、工艺能力、安全设计等方面是否具备优势;当产品进入发展期时,恩智浦会大规模地开拓合作伙伴的产业池,共同培养基础能力,将成熟的应用作为参考设计,为技术设计服务、为商业模式配套,一起给产业链输送新的市场、技术与推广方案,推动整个产业链发展;而当产品进入成熟期时,恩智浦将完全开放技术能力平台,通过培训、线上和线下交流,以及前期合作伙伴的导入,支持合作伙伴进行更多创新性开发,提升大范围产业群体的技术能力。
除了数量,还需要关注什么?
2022年乃至今后几年内,汽车毫米波雷达数量的增加肯定是不争的事实,那么,除了数量之外,汽车雷达是否还会呈现一些新的值得关注的技术和应用趋势?
张慧博士对此给出了自己的6个判断:
- 车载毫米波雷达必须要继续解决一些关键问题,比如对静止目标、高度信息、隐藏目标的有效检测、以及成像能力的持续加强,这对解决毫米波雷达与其他传感器融合能力上带来的困扰至关重要。
- 以毫米波雷达、摄像头和激光雷达为代表的传感器已经成为自动驾驶的灵魂所在,它们正在迎来一个快速的发展和迭代周期。
- 随着毫米波雷达向成像领域发展,一个明确的趋势是传统纯雷达信号处理正在向深度学习、人工智能处理方向发展,这将对雷达和计算平台提出更高的要求。
- 除了现在的集成式雷达,未来有可能出现分布式情景,即前端和后端的计算平台实现有机整合,从而进一步降低成本并提高算力。
- 毫米波雷达除了应用于自动驾驶上,也在快速地向大交通、智能交通演进。这涉及到车路协同,即“聪明的车”和“智慧的路”的协同,但协同的方式将呈现多样化,既有通信,未来也有可能通过感知实现。
- 类似于当前特斯拉汽车视频感知能力的自主演进,今后,毫米波雷达自主学习、自我演进的能力也将不断加强。
石磊则补充称,从原来的后融合(目标级融合)向前融合(特征级融合或原始点云层面融合)发展,正成为比较明确的趋势。所谓“目标级融合”,指的是传统雷达自身分辨率有限,所以一辆汽车的点数就很有限,需要先对其进行跟踪。但到了4D汽车雷达阶段,随着雷达分辨率的提高,一个目标变成了一个扩展目标,如果只在雷达层面确认这些点是不是一个目标的话,会造成很多信息的丢失。
另一方面,毫米波雷达即便发展到4D雷达或4片级联雷达,也还远远没有走到所能达到的尽头。“过去雷达最大的缺点是分辨率不足,但现在我们通过更多芯片级联将分辨率提升到足够高的程度后,发现更突出的问题是动态范围不足。”石磊指出,若想在车上做出更好、更能实现环境感知的传感器,动态范围的提升是无法回避的话题。
“目前来看,先进制程下的单芯片雷达技术和成像雷达技术是比较值得关注的。”恩智浦半导体大中华区汽车电子首席系统架构师黄明达博士在今年3月接受本刊姊妹刊物《国际电子商情》采访时曾表示,今后几年内,得益于射频前端和处理器性能的不断提升,芯片制程工艺的不断改进升级,能够支持的波形和雷达算法更加复杂,除了数量增加之外,车载毫米波雷达在探测距离、距离分辨率、角度分辨率(包括俯仰方向)、检测和区分小目标等方面的能力会不断提升,实现相同性能条件下的功耗会不断降低。
集成趋势当前在中短距离雷达应用中尤其明显,比如射频前端和雷达处理器的集成,甚至是天线与芯片封装的集成,用来进一步降低系统成本,方便系统设计和应用。同时,随着域控制器算力的提高,AI和深度学习在雷达领域的应用会进一步提高毫米波雷达,包括4D成像雷达的性能。

