
该方案的独特之处,在于通过采用全场景渲染方法,结合使用几百个微型射频前端构成一个可扩展的仿真屏幕,能够帮助用户在宽广的连续视场(FOV)(水平方向+/-70°,垂直方向+/-15°)内发现更多目标(最多512个);支持仿真近距离目标和远距离目标,能够生成距离在1.5米-300米、速度0-400kph的静态目标和动态目标;还能凭借小于1 度的角度分辨率提供多目标、多角度驾驶场景仿真。

是德科技雷达场景仿真器
成功打造这个解决方案需要在两项关键技术上取得突破性进展,一项是专用的微型射频前端,每个前端均自带天线,8个这样的射频前端集成到一块电路板上。然后,64块电路板呈半圆形阵列排列,构成仿真屏幕。
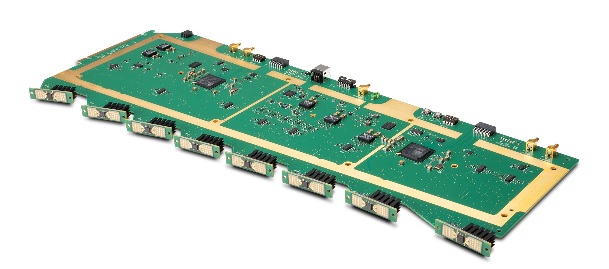
紧凑型RSE射频前端
为什么需要全场景雷达仿真?
将自动驾驶等级从当前汽车工程学会(SAE)定义的L2+/3级提升至L5级绝非易事。是德科技副总裁兼汽车与能源解决方案事业部总经理Tom Goetzl指出,汽车制造商当前正面临着两大关键挑战:
- 道路测试与软件仿真测试之间的鸿沟
当前的传感器和控制模块是在具有软件在环测试功能的仿真环境中进行测试。尽管软件仿真很有用,但它无法完全重现现实情况以及可能出现的不完美的传感器响应,而全自动驾驶汽车必须知道如何应对这样的情况。
通过对原型车或合法上路车辆中集成的完整系统进行道路测试,汽车制造商能够对最终产品的性能进行验证,然后再将它们推向市场。道路测试至关重要,也是开发过程中不可或缺的一环,但考虑到测试成本、测试所需时间和测试可重复性等一系列问题,完全依赖道路测试变得不切实际。如果采用这种方式,车辆需要经过几百年的测试才能达到足够的可靠性,万无一失地安全行驶在城市和乡村道路上。
- 在真实条件下训练先进驾驶辅助系统(ADAS)/自动驾驶(AV)算法的鸿沟
车载雷达测试对于训练自动驾驶算法具有重要意义,这一点是毋庸置疑的。这些算法使用车载雷达传感器获取的数据做出决策,指示车辆在遇到特定行驶状况时应该做出何种响应。但如果算法没有经过正确训练,它们可能会做出意外决策,危及驾乘人员或行人安全。
“传感器、精准算法与强大处理器的结合是实现自动驾驶的关键因素,传感器可以感知周围的环境,处理器和算法可以做出正确的决策,并确保遵守道路交通规则。”Tom Goetzl强调称,必须确保新ADAS功能是安全可靠的,采用不成熟的系统过早进行道路测试会有很大风险。因此,需要能够仿真真实场景,对实际采用的传感器、电子控制单元(ECU)代码、人工智能逻辑等部分进行验证。通过尽早测试更多场景,能够让OEM 清楚何时可以完成开发、何时可以发布ADAS功能。
传统测试方案的局限
使用多个雷达目标仿真器(RTS)的传统测试系统并不被Tom Goetzl所看好,核心原因在于每个RTS都向雷达传感器呈现多个点目标,并通过机械移动天线来仿真水平位置和垂直位置,这种机械式的自动化操作延缓了整体测试速度。
除此之外,有些解决方案采用了只包含少数几个RTS的天线墙,这意味着目标可以出现在场景中的任何地方,但不能同时出现。在静态或准静态环境下,这种方法可以测试横向移动的少数几个目标,但受到机械臂速度的限制。
现有的雷达传感器测试解决方案的视场(FOV)也很有限,无法分辨距离小于4米的目标。在测试雷达传感器时,如果目标数量不够多,就无法反映出完整的驾驶场景,重现真实环境中的复杂情况。

因此,要填补这些鸿沟,需要采用新的雷达传感器测试方法。Tom Goetzl表示,这种方法不是通过仿真目标来进行目标探测,而是需要仿真完整的交通场景,并且可以是在实施道路测试之前先在实验室中进行测试。通过在实验室中执行全场景仿真,OEM能够任意组合各种可重复的复杂场景、高密度(静止或运动)目标、环境特征,尽早测试更多驾驶场景,从而显著加速先进驾驶辅助系统/自动驾驶算法的学习。
“自动驾驶无疑是汽车发展演进的重要方向,而传统汽车和自动驾驶汽车的测试方法明显不一样。”是德科技汽车与新能源事业部大中华区业务经理马健锐认为,传统汽车关注道路测试,在一些典型的特定场景下,能够完成规定的法规要求测试即可。但是对于自动驾驶汽车来说,涉及到的不仅有驾驶员,还包括了系统。
在实验室里模拟真实道路场景,靠谱吗?
自动驾驶汽车的测试方法大概分两类,一类是基于场景的虚拟测试,另一类是基于实际道路的测试。传统汽车通过数千万公里、甚至上亿公里的实际行驶,包括可能会出现的各种各样的状况,积累了现在的安全数据。自动驾驶汽车也是如此,依然需要这样的数据保证,但这些数据如何获取?
传统的道路测试方法,理论上需要几百年甚至更长的时间测试才可以。即使如此,也不能满足全部的自动驾驶汽车测试场景的要求,因为道路测试,相对来讲仍然比较有限和简单。因此,自动驾驶对于测试的需求,对于场景测试、虚拟测试的需求明显要比传统测试迫切得多。
如前文所述,是德科技雷达场景仿真器采用了专利技术,从而不再仅对单个目标进行仿真,而是仿真整个交通场景来进行目标探测,这意味着汽车OEM由此可以获得以下关键优势:
基于场景的虚拟测试
第一,视野更宽广。雷达场景仿真器不仅允许雷达传感器在更宽的连续视场内发现更多目标,还支持仿真近距离目标和远距离目标。这样可以避免雷达视野遗留盲区,还能提升算法训练效果,从而高效探测和分辨密集、复杂场景中的多个目标。因此,自动驾驶汽车可以基于全局情形而不仅仅是测试设备所得到的信息来做出决策。
第二,测试复杂的真实环境。在测试雷达传感器时,如果目标数量不够多,就无法反映出完整的驾驶场景,重现真实环境中的复杂情况。是德科技雷达场景仿真器允许汽车制造商在实验室内设定各种交通密度、速度、距离和目标总数,真正仿真现实驾驶场景。无论是常见情况还是极端情况,都可以提前进行测试,最大限度降低风险。
第三,加快学习速度。是德科技雷达场景仿真器为在实验室中测试复杂场景提供了一个确定的真实环境,此前我们只能在道路上进行这样的场景测试。借助该仿真器所提供的测试方法,汽车制造商能够使用可重复的高密度复杂场景提前进行测试,场景中可以包括静止目标或运动目标,还包含各种可变环境特征,从而显著提高 ADAS/AD 算法学习速度,避免人工测试或自动化测试导致的效率低下问题。
第四,提高场景分辨率。汽车制造商需要测试雷达能否分辨道路上的障碍物,以便平稳、迅速地过渡到自动驾驶。是德科技这种借助点云(每个目标多个反射点)提高目标分辨率的做法,填补了这一技术空白。
是德科技汽车与新能源事业部大中华区业务拓展经理祝晓悦表示,将真实道路场景搬进实验室里仿真测试,目标就是为了让车上的雷达传感器在实验室里面可以看到更多,然后可以测到跟真实道路上非常接近的复杂的场景以及一些Corner Case,最终加速整个算法的迭代,使得自动驾驶最终目标的实现进程能够加快。目前,是德科技已经宣布与雷诺展开合作,而来自中国的自动驾驶方案商、头部主机厂商也对此表现出了强烈的需求意向。

