
4D成像雷达是一项突破性的技术,可以在任何光照或天气条件下,将雷达的功能从测量距离、速度、水平方位角扩展到涵盖距离(Range)、方位(Azimuth)、俯仰角(Elevation)和相对速度的测量,显著增强了雷达的性能。通俗地讲,与现有传统毫米波雷达相比,4D成像雷达在水平和俯仰方向上的分辨率得到了极大提高,所以它才能够不仅可以“理解”水平面,还可以“理解”垂直平面,真正把前方探测到的物体轮廓大概描绘出来,从而帮助车辆判断是在物体“下方”还是“上方”行驶。
为什么需要4D成像雷达?
恩智浦半导体大中华区汽车电子首席系统架构师黄明达博士日前在接受《电子工程专辑》采访时指出,随着自动驾驶等级的不断提高,到2023年,大约有60%左右的新车将会装配雷达。
“为什么汽车雷达会得到如此高的增长率,我认为得益于以下两个原因:一是各国政策法规的推动,二是雷达应用场景的日益广泛。”黄明达解释说,比如,2018年,欧洲新车要想达到E-NCAP五星标准,就必须加装自动紧急制动系统(Automatic Emergency Breaking, AEB)系统。中国在2020年C-NCAP标准中提出了同样的要求;2021年,日本政府强制所有新车必须加装前向AEB和后向倒车AEB系统;美国20家OEM厂商日前自发签订协议,自愿在2022年确保所有新车加装AEB系统;欧盟则不但要求所有新车在2024年必须强制加装AEB系统,还在2020年对评测规范进行了升级,规定“AEB系统在低光条件下也必须有效”。考虑到低光条件下摄像头性能会下降,于是车厂对雷达的需求大幅增加。
如果从雷达应用场景来看,L1级别目前需要实现自适应巡航控制(Adaptive Cruise Control, ACC)或者AEB功能,这样的系统通常搭载一颗前向的长距离雷达与摄像头组合,后向功能中的盲点探测系统(BSD)、换道辅助等功能则需要两颗后角雷达;到了L2级别,通常需要再额外多加装两颗前角雷达,以实现前向横穿预警、带转向的AEB、自动泊车(APA)等功能,并与数颗摄像头一起实现360度车辆环视。
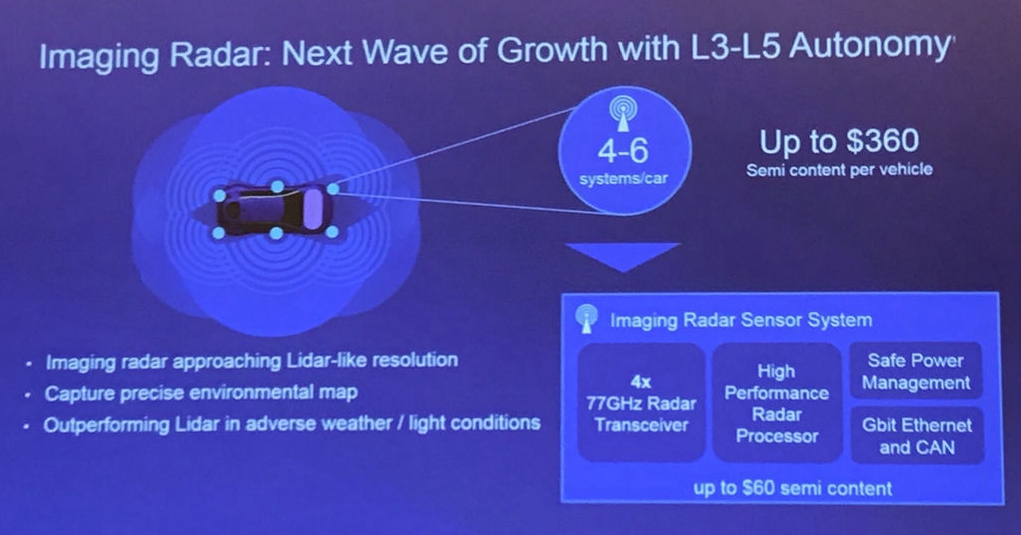
在L2+/L3以上级别,摄像头和雷达传感器的数量会进一步增多,对传感器性能的要求也大幅提升。例如在L1、L2级别时,前向雷达只需具备辨别车辆或行人的能力即可,而到了L3+级别时则需要4D成像雷达。根据Yole Développement的预测数据,4D成像雷达将首先出现在豪华轿车和自动驾驶出租车上,这会带来5.5亿美元以上的投资,并在2020年至2025年间以124%的复合年增长率(CAGR)增长。
典型的应用场景
如前文所述,4D成像雷达的主要特点是其角分辨率非常高,前向4D成像雷达角分辨率可达1°方位角和2°俯仰角。当具备这种能力的雷达出现时,车、人的反射点将不再只是一个简单的点,而是由成百上千甚至更多的点组成的图像,从而显示出整个物体轮廓。
先让我们看看与成像雷达相关的几种典型应用场景:
一是如果当较小的物体(如行人或摩托车手)与较大的物体(如卡车或其他障碍物)混杂或被掩盖时,成像雷达系统可以识别,并且可以确定一个区域的物体是静止的还是运动的,以及它们朝哪个方向移动,且可以提供检测范围超过300m的实时数据。
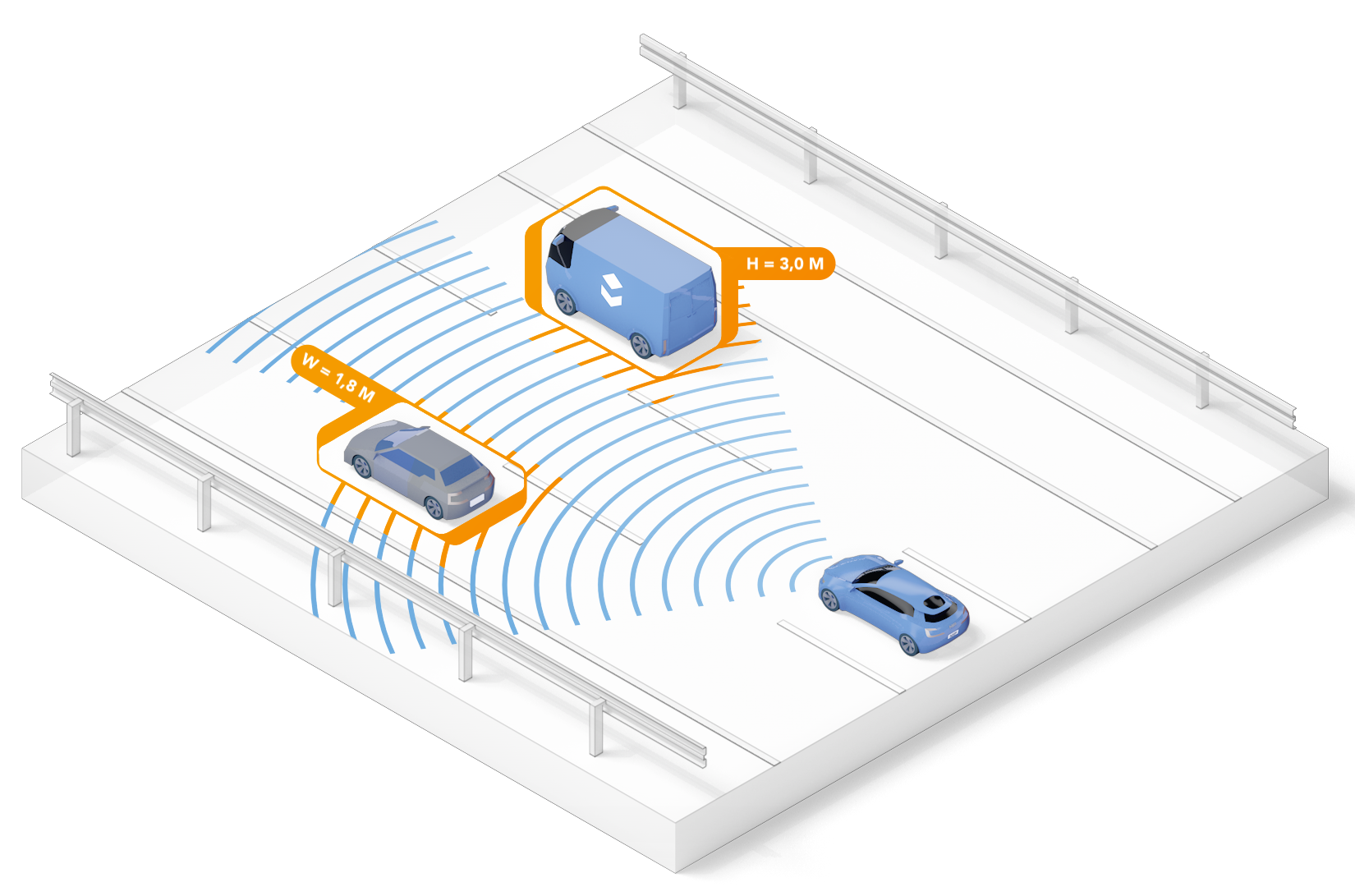
成像雷达系统能够在超过300米的距离内对不同物体加以区分识别(图片来源:NXP)
二是以汽车行驶在隧道中为例,得益于俯仰角探测性能的提升,成像雷达现在可以测量整个隧道的长度和宽度,并且能感知物体的几何形状,当隧道中出现其它的交通参与者时,比如卡车、摩托车和汽车,成像雷达就可以提供高分辨率图像。换言之,汽车的视觉更加先进了。
三是假如汽车以每小时80公里的速度在高速公路上行驶,而摩托车(一种反射率低的小物体)以每小时200公里的速度从后面驶来时。与摄像头和激光雷达不同,成像雷达可以在最初相距较远时就识别到摩托车,并可识别出这两个物体在以两种不同的速度运动。
这意味着,成像雷达不仅提供多模功能,还通过提供超高分辨率图像,实现了精确的环境地图绘制和场景感知,从而扩展了当前可用的L2+级自动驾驶功能,例如高速巡航和变道辅助。而当自动驾驶等级上升至L3及以上时,4D成像雷达将能够实现建图、定位、物体轮廓描绘、被测物体分类等多重功能。与摄像头,或是模式识别、机器学习相结合后,成像雷达系统就能够在1°方位角和2°俯仰角的高分辨率下,以±60°FoV(也有说是100°FoV)感知周边环境,这种增强的“感知能力”对于复杂驾驶环境中实现全自动驾驶极为重要。
总的来看,随着自动驾驶等级的提高,每辆车内装配的雷达传感器数量在不断增加,单个成像雷达如果希望达到非常高的角分辨率,就需要将多个雷达在射频前端进行级联从而形成更大的雷达天线阵列,以实现成像的能力。因此,单颗前向4D成像雷达模组需要更多的传感器芯片和性能更强的后端处理器。
成像雷达市场逐步升温
恩智浦一直是汽车雷达解决方案领域的领先者,他们希望用成像雷达替代激光雷达的想法已经有6年之久了。
在CES 2021上,恩智浦推出了由S32R45雷达处理器与TEF82xx全集成77GHz RFCMOS汽车雷达收发器组成的成像雷达解决方案,以及基于此形成的可扩展角雷达和前向雷达解决方案。它不仅能提供高分辨率图像,确保车辆的所有位置都能够覆盖雷达,还可以对汽车进行360度的安全环绕式探测,并支持成像雷达目标识别和分类功能,这对于在城市环境中的行车和自动泊车至关重要。
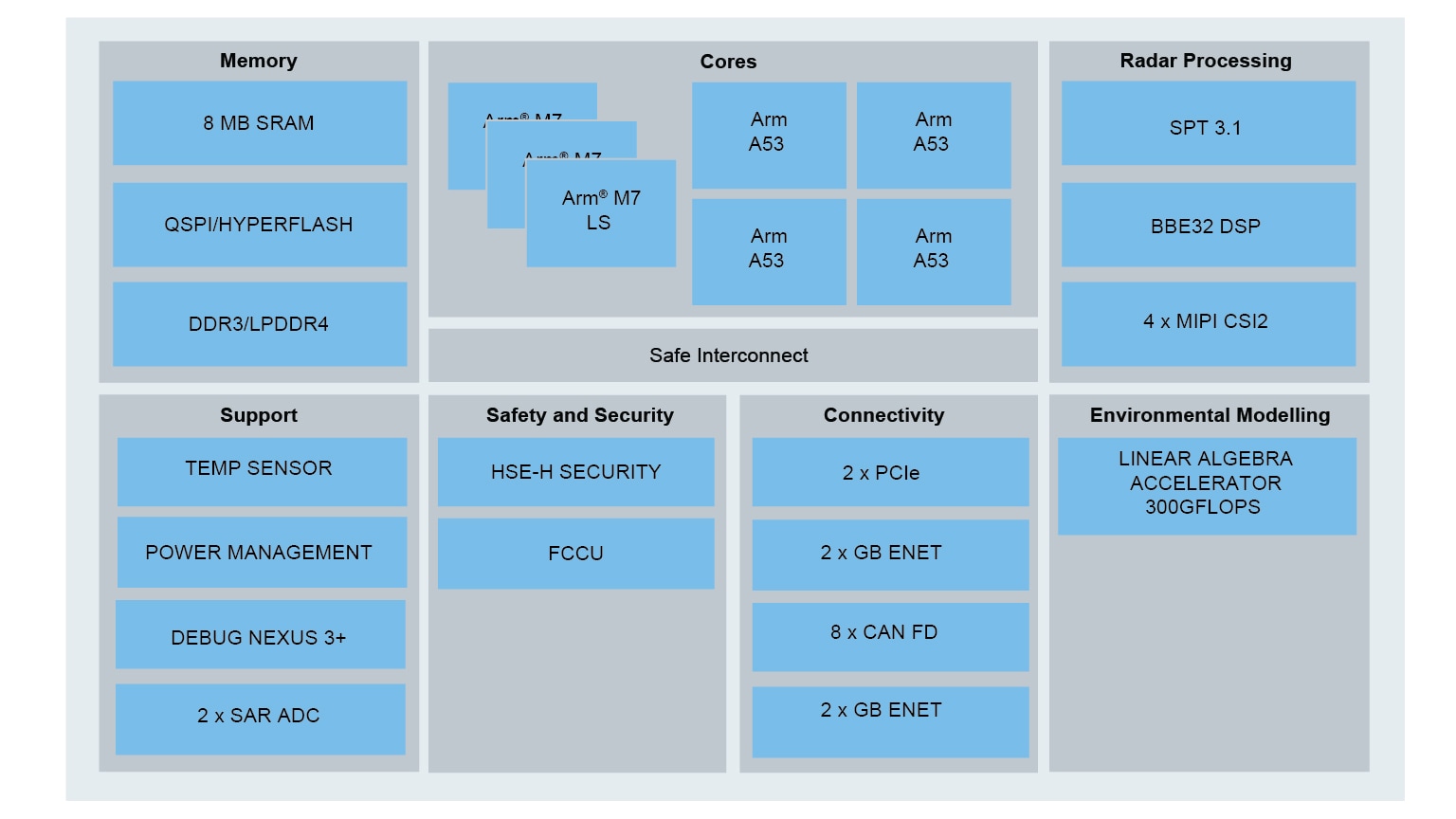
恩智浦S32R45雷达处理器结构框图
最新推出的16nm雷达处理器S32R294采用了两颗频率高达500MHz的Power Architecture e200z7 32位CPU,用于雷达信号的后处理和任务调度,如超分辨算法、信号聚类、目标追踪等,以及一个专门用于安全处理的Power Architecture e200z4内核,锁步频率最高可达250MHz,用于运行与功能安全相关的软件,如AUTOSAR OS、输出决策指令等。
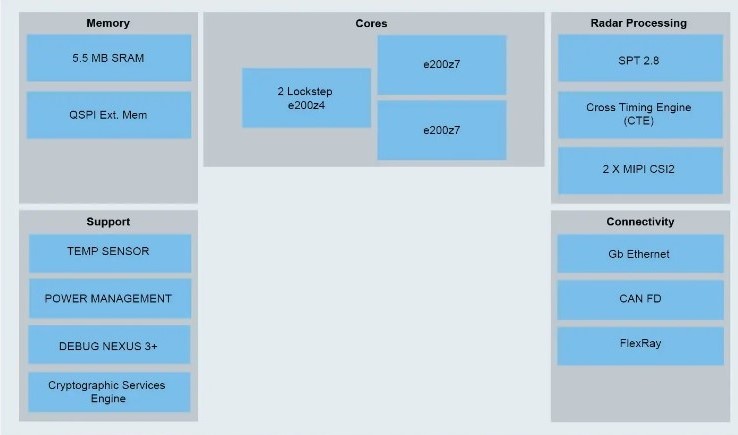
恩智浦S32R294雷达处理器结构框图
S32R294内置雷达处理加速单元,简称为SPT 2.8,对雷达中频信号的FFT、求模、峰值检测、直方图统计等最耗资源的运算进行硬件加速,是专门服务于FMCW雷达的信号处理加速单元。其主频高达430MHz,交叉定时引擎(CTE)支持精确的时序生成和触发。
恩智浦半导体大中华区雷达产品市场经理杨昌介绍说,雷达中频信号处理主要是从中频信号中获得距离、速度和角度等基础信息,由SPT2.8计算求得,后处理交由Z7和Z4核负责超分辨算法、信号聚类、目标追踪、决策等计算,获得的目标级数据和决策指令通过CAN FD接口输出到车身控制单元或者ADAS域控制器。
与以前的设备S32R274相比,S32R294的尺寸与之相同,均为7.5mm×7.5mm,但后者提供了额外的系列可扩展性,包括高达5.5 MB的SRAM;最多2个MIPI CSI2,适用于使用恩智浦TEF82xx的先进角雷达和前雷达应用;80%以上的软件复用率;0.9W的功耗,不到上一代产品的一半。
S32R294具有多种配置,可以支持从入门到高端的全系应用开发,如一发三收,三发四收,六发八收等毫米波雷达信号的处理。
“传统77GHz雷达的RF部分通常由三颗芯片组成,分别负责VCO、信号发射与接收。但在NXP新一代的77GHz雷达中, VCO、信号发射接收和采样集成在单颗封装内,并为MCU输出采样好的中频信号用以进行信号处理。”杨昌认为,毫米波雷达今后将呈现高分辨率和高集成度两大趋势。
高分辨率可以理解为,多片MMIC芯片通过LO级联,实现MMIC芯片间的同步,并为后端MCU提供多路高信噪比、高采样率的中频信号。信号处理器则需要处理更大的数据量,因此MCU要有更多的MIPI CSI-2接口、更强的算力、专门的计算加速单元去处理四倍乃至八倍的数据。
高集成度则是把VCO、信号发射、接收、采样、MCU等电路集成在同一个封装内,应用于车身的中短距离雷达和泊车雷达。相比于多MMIC级联,高集成度结局方案具有小型化,低功耗,性能满足需求等优势。
会取代激光雷达吗?
黄明达在2021年初接受本刊专访时认为,从成本角度看,毫米波雷达肯定比激光雷达成本低;从产业发展角度看,毫米波雷达产业成熟年份比激光雷达早5-10年左右,尤其相较固态激光雷达更是如此,所以毫米波雷达成本非常有优势。
图片来源:NXP
聆英咨询的报告显示,摄像头与毫米波雷达成本摄像头单价一般在600元以下,其中单目摄像头单价区间大致在150~600元左右,环视摄像头区间在70~500元左右。毫米波雷达市场中,近程雷达单价在300~400元左右,远程雷达在800~1200元左右。由Mobileye提供的自动驾驶视觉方案单车总价在几百美元。
但在自动驾驶领域中,由于各具优劣势,毫米波雷达、激光雷达和摄像头在L3以上自动驾驶中通常是作为互为冗余、互为备份的系统出现的。例如激光雷达在雨雾、沙尘的天气情况下就很难实现它所声称的性能;摄像头对光线则会比较敏感;而传统毫米波雷达尽管全天候能力最强,但除了缺少高度维度的感知外,水平角分辨率低、难以检测横穿目标和静止目标等也是瓶颈。所以,综合来看,“未来的技术发展并非几种方向选择其一这么简单。”
克服汽车雷达间干扰
雷达干扰是公认的挑战,但是就目前的市场占有率来说,发生的概率相对较低,所以市场还没有强烈地意识到这一点。然而,越来越多的汽车将配备雷达传感器,发生干扰的概率势必将增加。相关文献报道指出,当雷达装配率占所有车辆比例达到50%及以上时,雷达受到干扰的概率将达到90%甚至更高,这是今后所有的车载雷达都亟待解决的问题。
恩智浦在近期发布的《汽车应用中的雷达间干扰简介》白皮书中提出,使用同样的雷达频谱(76-81GHz)和雷达波形参数配置不像通讯系统有明确的信道接入规则,是造成汽车雷达相互干扰的重要原因。
“不同Tier 1所采用的雷达参数配置是不同的,这与通讯系统有统一规则且受到监管完全不同。”黄明达举例称,两辆相向而行的汽车如果都配备有前向雷达,在互相照射且在对方雷达的视场角(FOV)里时,如果双方的雷达信号发射处于同一时间、同一频率,或有所交叠,就会产生相应的干扰。
具体产生的影响分为两种情况:第一,底噪会极大提升。简单而言,如果雷达发现一个被测物体,就会在测距的距离FFT上出现尖峰,峰值两边是底噪,当尖峰高出底噪很多时,雷达系统可以很明确地判断出这是一个障碍物。但如果其受到干扰,底噪就会提高,导致真正的检测信号被淹没,雷达就会做出误判,导致产生严重后果。第二,干扰信号与真正的发射接收信号是完全相关的状态,从而产生虚假信号。
《汽车应用中的雷达间干扰简介》白皮书介绍了恩智浦三种抗干扰的方法:
- 避免前端饱和
下图中,蓝线代表有效的反射信号,红线代表干扰信号。有效的反射信号从被测物体返回时,其衰减与距离的四次方成正比;干扰信号则是从对方的雷达直接发射,其衰减与距离的平方成正比。可以看出,随着距离的增长,干扰信号与有效信号到达接收端时会形成很大的差值,很容易形成饱和,所以需要在接收端进行调整增益,防止其饱和。

- 处理数字干扰
理论上,射频前端信号在传输给MCU时是中频信号,会形成很好的正弦波型,如果遭遇干扰,正弦波在受干扰的时段幅值和频率通常会升高。此时,可以使用高通滤波器、阈值检测,甚至短时傅里叶变换去进行干扰信号的检测,从而将其去除,之后再利用差值的办法将其还原成有效的正弦波等类似方法。
- 避免干扰
这种方法也是在MCU中实现,更加主动,可以将发射信号与伪噪声(PN)序列相乘,对雷达发射波形的发射频率进行动态调整,或是动态调整雷达波形的发射时间点等等。
黄明达表示,上述三种方法应对今后几年内的车载雷达干扰已足够,但随着雷达的装配率越来越高,就需要所有的OEM、Tier 1厂商、芯片厂商共同制定标准化规则,去更好地解决干扰。“在此基础上,我们甚至可以更进一步,不将各个雷达传感器视为独立单元,而是将雷达传感器视为同一传感系统中的多个单元。在这个系统中,雷达传感器协同工作,彼此之间共享信息,并作为一个更大的生态系统实现同一个目标。”他说。

