击上方“一口Linux”,选择“星标公众号”

1、端点:位于USB设备或主机上的一个数据缓冲区,用来存放和发送USB的各种数据,每一个端点都有惟一的确定地址,有不同的传输特性(如输入端点、输出端点、配置端点、批量传输端点)
2、帧:时间概念,在USB中,一帧就是1MS,它是一个独立的单元,包含了一系列总线动作,USB将1帧分为好几份,每一份中是一个USB的传输动作。
3、上行、下行:设备到主机为上行,主机到设备为下行
下面以一问一答的形式开始学习吧。
问题一:USB的传输线结构是如何的呢?
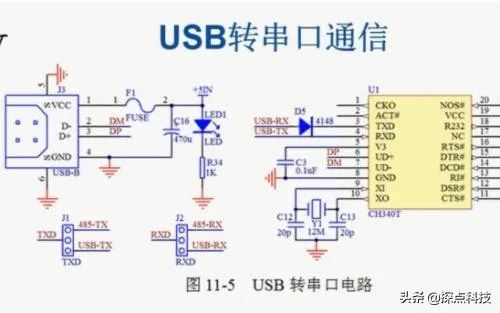
答案一:一条 USB的传输线分别由地线、电源线、D+、D-四条线构成,D+和D-是差分输入线,它使用的是3.3V的电压(注意哦,与CMOS的5V电平不同),而 电源线和地线可向设备提供5V电压,最大电流为500MA(可以在编程中设置的,至于硬件的实现机制,就不要管它了)。
问题二:数据是如何在USB传输线里面传送的
答案二:数据在USB线里传送是由低位到高位发送的。
问题三:USB的编码方案?
答案三:USB 采用不归零取反来传输数据,当传输线上的差分数据输入0时就取反,输入1时就保持原值,为了确保信号发送的准确性,当在USB总线上发送一个包时,传输设 备就要进行位插入***作(即在数据流中每连续6个1后就插入一个0),从而强迫NRZI码发生变化。这个了解就行了,这些是由专门硬件处理的。

问题四:USB的数据格式是怎么样的呢?
答案四:和其他的一样,USB数据是由二进制数字串构成的,首先数字串构成域(有七种),域再构成包,包再构成事务(IN、OUT、SETUP),事务最后构成传输(中断传输、并行传输、批量传输和控制传输)。下面简单介绍一下域、包、事务、传输,请注意他们之间的关系。
(一)域:是USB数据最小的单位,由若干位组成(至于是多少位由具体的域决定),域可分为七个类型:
1、同步域(SYNC),八位,值固定为0000 0001,用于本地时钟与输入同步
2、标识域(PID),由四位标识符+四位标识符反码构成,表明包的类型和格式,这是一个很重要的部分,这里可以计算出,USB的标识码有16种,具体分类请看问题五。
3、地址域(ADDR):七位地址,代表了设备在主机上的地址,地址000 0000被命名为零地址,是任何一个设备第一次连接到主机时,在被主机配置、枚举前的默认地址,由此可以知道为什么一个USB主机只能接127个设备的原因。
4、端点域(ENDP),四位,由此可知一个USB设备有的端点数量最大为16个。
5、帧号域(FRAM),11位,每一个帧都有一个特定的帧号,帧号域最大容量0x800,对于同步传输有重要意义(同步传输为四种传输类型之一,请看下面)。
6、数据域(DATA):长度为0~1023字节,在不同的传输类型中,数据域的长度各不相同,但必须为整数个字节的长度
7、校验域(CRC):对令牌包和数据包(对于包的分类请看下面)中非PID域进行校验的一种方法,CRC校验在通讯中应用很泛,是一种很好的校验方法,至于具体的校验方法这里就不多说,请查阅相关资料,只须注意CRC码的除法是模2运算,不同于10进制中的除法。

(二)包:由域构成的包有四种类型,分别是令牌包、数据包、握手包和特殊包,前面三种是重要的包,不同的包的域结构不同,介绍如下
1、令牌包:可分为输入包、输出包、设置包和帧起始包(注意这里的输入包是用于设置输入命令的,输出包是用来设置输出命令的,而不是放据数的)
其中输入包、输出包和设置包的格式都是一样的:
SYNC+PID+ADDR+ENDP+CRC5(五位的校验码)
(上面的缩写解释请看上面域的介绍,PID码的具体定义请看问题五)
帧起始包的格式:
SYNC+PID+11位FRAM+CRC5(五位的校验码)
2、数据包:分为DATA0包和DATA1包,当USB发送数据的时候,当一次发送的数据长度大于相应端点的容量时,就需要把数据包分为好几个包,分批发 送,DATA0包和DATA1包交替发送,即如果第一个数据包是DATA0,那第二个数据包就DATA1。但也有例外情况,在同步传输中(四类传输类型中 之一),所有的数据包都是为DATA0,格式如下:
SYNC+PID+0~1023字节+CRC16
3、握手包:结构最为简单的包,格式如下
SYNC+PID
(注上面每种包都有不同类型的,USB1.1共定义了十种包,具体请见问题五)
(三)事务:分别有IN事务、OUT事务和SETUP事务三大事务,每一种事务都由令牌包、数据包、握手包三个阶段构成,这里用阶段的意思是因为这些包的发送是有一定的时间先后顺序的,事务的三个阶段如下:
1、令牌包阶段:启动一个输入、输出或设置的事务
2、数据包阶段:按输入、输出发送相应的数据
3、握手包阶段:返回数据接收情况,在同步传输的IN和OUT事务中没有这个阶段,这是比较特殊的。
事务的三种类型如下(以下按三个阶段来说明一个事务):
1、 IN事务:
令牌包阶段——主机发送一个PID为IN的输入包给设备,通知设备要往主机发送数据;
数据包阶段——设备根据情况会作出三种反应(要注意:数据包阶段也不总是传送数据的,根据传输情况还会提前进入握手包阶段)
1) 设备端点正常,设备往入主机里面发出数据包(DATA0与DATA1交替);
2) 设备正在忙,无法往主机发出数据包就发送NAK无效包,IN事务提前结束,到了下一个IN事务才继续;
3) 相应设备端点被禁止,发送错误包STALL包,事务也就提前结束了,总线进入空闲状态。
握手包阶段——主机正确接收到数据之后就会向设备发送ACK包。
2、 OUT事务:
令牌包阶段——主机发送一个PID为OUT的输出包给设备,通知设备要接收数据;
数据包阶段——比较简单,就是主机会设备送数据,DATA0与DATA1交替
握手包阶段——设备根据情况会作出三种反应
1)设备端点接收正确,设备往入主机返回ACK,通知主机可以发送新的数据,如果数据包发生了CRC校验错误,将不返回任何握手信息;
2) 设备正在忙,无法往主机发出数据包就发送NAK无效包,通知主机再次发送数据;
3) 相应设备端点被禁止,发送错误包STALL包,事务提前结束,总线直接进入空闲状态。
3、SETUP事务:
令牌包阶段——主机发送一个PID为SETUP的输出包给设备,通知设备要接收数据;
数据包阶段——比较简单,就是主机会设备送数据,注意,这里只有一个固定为8个字节的DATA0包,这8个字节的内容就是标准的USB设备请求命令(共有11条,具体请看问题七)
握手包阶段——设备接收到主机的命令信息后,返回ACK,此后总线进入空闲状态,并准备下一个传输(在SETUP事务后通常是一个IN或OUT事务构成的传输)
(四)传输:
传输由OUT、IN、SETUP事务其中的事务构成,传输有四种类型,中断传输、批量传输、同步传输、控制传输,其中中断传输和批量转输的结构一样,同步传输有最简单的结构,而控制传输是最重要的也是最复杂的传输。
1、中断传输:由OUT事务和IN事务构成,用于键盘、鼠标等HID设备的数据传输中
2、批量传输:由OUT事务和IN事务构成,用于大容量数据传输,没有固定的传输速率,也不占用带宽,当总线忙时,USB会优先进行其他类型的数据传输,而暂时停止批量转输。如U盘
3、同步传输:由OUT事务和IN事务构成,有两个特殊地方,第一,在同步传输的IN和OUT事务中是没有返回包阶段的;第二,在数据包阶段所有的数据包都为DATA0,如视频音频传输
4、控制传输:最重要的也是最复杂的传输,控制传输由三个阶段构成(初始设置阶段、可选数据阶段、状态信息步骤),每一个阶段可以看成一个的传输,也就是说控制传输其实是由三个传输构成的,用来于
USB设备初次加接到主机之后,主机通过控制传输来交换信息,设备地址和读取设备的描述符,使得主机识别设备,并安装相应的驱动程序,这是每一个USB开发者都要关心的问题。
1、初始设置步骤:就是一个由SET事务构成的传输
2、可选数据步骤:就是一个由IN或OUT事务构成的传输,这个步骤是可选的,要看初始设置步骤有没有要求读/写数据(由SET事务的数据包阶段发送的标准请求命令决定)
3、 状态信息步骤:顾名思义,这个步骤就是要获取状态信息,由IN或OUT事务构成构成的传输,但是要注意这里的IN和OUT事务和之前的INT和OUT事务有两点不同:
1) 传输方向相反,通常IN表示设备往主机送数据,OUT表示主机往设备送数据;在这里,IN表示主机往设备送数据,而OUT表示设备往主机送数据,这是为了和可选数据步骤相结合;
2) 在这个步骤里,数据包阶段的数据包都是0长度的,即SYNC+PID+CRC16
除了以上两点有区别外,其他的一样,这里就不多说
(思考:这些传输模式在实际***作中应如何通过什么方式去设置?)
问题五:标识码有哪些?
答案五:如同前 面所说的标识码由四位数据组成,因此可以表示十六种标识码,在USB1.1规范里面,只用了十种标识码,USB2.0使用了十六种标识码,标识码的作用是 用来说明包的属性的,标识码是和包联系在一起的,首先简单介绍一下数据包的类型,数据包分为令牌包、数据、握手包和特殊包四种(具体分类请看问题七),标 识码分别有以下十六种:
令牌包 :
0x01 输出(OUT)启动一个方向为主机到设备的传输,并包含了设备地址和标号
0x09 输入 (IN) 启动一个方向为设备到主机的传输,并包含了设备地址和标号
0x05 帧起始(SOF)表示一个帧的开始,并且包含了相应的帧号
0x0d 设置(SETUP)启动一个控制传输,用于主机对设备的初始化
数据包 :
0x03 偶数据包(DATA0),
0x0b 奇数据包(DATA1)
握手包:
0x02 确认接收到无误的数据包(ACK)
0x0a 无效,接收(发送)端正在忙而无法接收(发送)信息
0x0e 错误,端点被禁止或不支持控制管道请求
特殊包 0x0C 前导,用于启动下行端口的低速设备的数据传输
问题六:USB主机是如何识别USB设备的?
答案六:当USB设备插上主机时,主机就通过一系列的动作来对设备进行枚举配置(配置是属于枚举的一个态,态表示暂时的状态),这这些态如下:
1、接入态(Attached):设备接入主机后,主机通过检测信号线上的电平变化来发现设备的接入;
2、供电态(Powered):就是给设备供电,分为设备接入时的默认供电值,配置阶段后的供电值(按数据中要求的最大值,可通过编程设置)
3、缺省态(Default):USB在被配置之前,通过缺省地址0与主机进行通信;
4、地址态(Address):经过了配置,USB设备被复位后,就可以按主机分配给它的唯一地址来与主机通信,这种状态就是地址态;
5、配置态(Configured):通过各种标准的USB请求命令来获取设备的各种信息,并对设备的某此信息进行改变或设置。
6、挂起态(Suspended):总线供电设备在3ms内没有总线***作,即USB总线处于空闲状态的话,该设备就要自动进入挂起状态,在进入挂起状态后,总的电流功耗不超过280UA。
问题七:刚才在答案四提到的标准的USB设备请求命令究竟是什么?
答案七:标准的 USB设备请求命令是用在控制传输中的“初始设置步骤”里的数据包阶段(即DATA0,由八个字节构成),请看回问答四的内容。标准USB设备请求命令共 有11个,大小都是8个字节,具有相同的结构,由5个字段构成(字段是标准请求命令的数据部分),结构如下(括号中的数字表示字节数,首字母bm,b,w 分别表示位图、字节,双字节):
bmRequestType(1)+bRequest(1)+wvalue(2)+wIndex(2)+wLength(2)
各字段的意义如下:
1、bmRequestType:D7D6D5D4D3D2D1D0
D7=0主机到设备
=1设备到主机;
D6D5=00标准请求命令
=01 类请求命令
=10用户定义的命令
=11保留值
D4D3D2D1D0=00000 接收者为设备
=00001 接收者为设备
=00010 接收者为端点
=00011 接收者为其他接收者
=其他 其他值保留
2、 bRequest:请求命令代码,在标准的USB命令中,每一个命令都定义了编号,编号的值就为字段的值,编号与命令名称如下(要注意这里的命令代码要与 其他字段结合使用,可以说命令代码是标准请求命令代码的核心,正是因为这些命令代码而决定了11个USB标准请求命令):
0) 0 GET_STATUS:用来返回特定接收者的状态1) 1 CLEAR_FEATURE:用来清除或禁止接收者的某些特性2) 3 SET_FEATURE:用来启用或激活命令接收者的某些特性3) 5 SET_ADDRESS:用来给设备分配地址4) 6 GET_DEscriptOR:用于主机获取设备的特定描述符5) 7 SET_DEscriptOR:修改设备中有关的描述符,或者增加新的描述符6) 8 GET_CONFIGURATION:用于主机获取设备当前设备的配置值(注同上面的不同)7) 9 SET_CONFIGURATION:用于主机指示设备采用的要求的配置8) 10 GET_INTERFACE:用于获取当前某个接口描述符编号9) 11 SET_INTERFACE:用于主机要求设备用某个描述符来描述接口10) 12 SYNCH_FRAME:用于设备设置和报告一个端点的同步帧
以上的11个命令要说得明白真的有一匹布那么长,请各位去看书吧,这里就不多说了,控制传输是USB的重心,而这11个命令是控制传输的重心,所以这11个命令是重中之重,这个搞明白了,USB就算是入门了。
问题八:在标准的USB请求命令中,经常会看到Descriptor,这是什么来的呢?
回答 八:Descriptor即描述符,是一个完整的数据结构,可以通过C语言等编程实现,并存储在USB设备中,用于描述一个USB设备的所有属性,USB 主机是通过一系列命令来要求设备发送这些信息的。它的作用就是通过如问答节中的命令***作来给主机传递信息,从而让主机知道设备具有什么功能、属于哪一 类设备、要占用多少带宽、使用哪类传输方式及数据量的大小,只有主机确定了这些信息之后,设备才能真正开始工作,所以描述符也是十分重要的部分,要好好掌 握。标准的描述符有5种,USB为这些描述符定义了编号:
1——设备描述符
2——配置描述符
3——字符描述符
4——接口描述符
5——端点描述符
上面的描述符之间有一定的关系,一个设备只有一个设备描述符,而一个设备描述符可以包含多个配置描述符,而一个配置描述符可以包含多个接口描述符,一个接口使用了几个端点,就有几个端点描述符。这间描述符是用一定的字段构成的,分别如下说明:
1、设备描述符
struct _DEVICE_DEscriptOR_STRUCT{BYTE bLength; //设备描述符的字节数大小,为0x12BYTE bDescriptorType; //描述符类型编号,为0x01WORD bcdUSB; //USB版本号BYTE bDeviceClass; //USB分配的设备类代码,0x01~0xfe为标准设备类,0xff为厂商自定义类型//0x00不是在设备描述符中定义的,如HIDBYTE bDeviceSubClass; //usb分配的子类代码,同上,值由USB规定和分配的BYTE bDeviceProtocl; //USB分配的设备协议代码,同上BYTE bMaxPacketSize0; //端点0的最大包的大小WORD idVendor; //厂商编号WORD idProduct; //产品编号WORD bcdDevice; //设备出厂编号BYTE iManufacturer; //描述厂商字符串的索引BYTE iProduct; //描述产品字符串的索引BYTE iSerialNumber; //描述设备序列号字符串的索引BYTE bNumConfiguration; //可能的配置数量}
2、配置描述符
struct _CONFIGURATION_DEscriptOR_STRUCT{BYTE bLength; //设备描述符的字节数大小,为0x12BYTE bDescriptorType; //描述符类型编号,为0x01WORD wTotalLength; //配置所返回的所有数量的大小BYTE bNumInterface; //此配置所支持的接口数量BYTE bConfigurationVale; //Set_Configuration命令需要的参数值BYTE iConfiguration; //描述该配置的字符串的索引值BYTE bmAttribute; //供电模式的选择BYTE MaxPower; //设备从总线提取的最大电流}
3、字符描述符
struct _STRING_DEscriptOR_STRUCT{BYTE bLength; //设备描述符的字节数大小,为0x12BYTE bDescriptorType; //描述符类型编号,为0x01BYTE SomeDescriptor[36]; //UNICODE编码的字符串}
4、接口描述符
struct _INTERFACE_DEscriptOR_STRUCT{BYTE bLength; //设备描述符的字节数大小,为0x12BYTE bDescriptorType; //描述符类型编号,为0x01BYTE bInterfaceNunber; //接口的编号BYTE bAlternateSetting;//备用的接口描述符编号BYTE bNumEndpoints; //该接口使用端点数,不包括端点0BYTE bInterfaceClass; //接口类型BYTE bInterfaceSubClass;//接口子类型BYTE bInterfaceProtocol;//接口所遵循的协议BYTE iInterface; //描述该接口的字符串索引值}
5、端点描述符
struct _ENDPOIN_DEscriptOR_STRUCT{BYTE bLength; //设备描述符的字节数大小,为0x12BYTE bDescriptorType; //描述符类型编号,为0x01BYTE bEndpointAddress; //端点地址及输入输出属性BYTE bmAttribute; //端点的传输类型属性WORD wMaxPacketSize; //端点收、发的最大包的大小BYTE bInterval; //主机查询端点的时间间隔}
在搞明白了上面的八个问题之后,就可以进入USB的下一步学习了
end
一口Linux
关注,回复【1024】海量Linux资料赠送
精彩文章合集
文章推荐
点击“阅读原文”查看更多分享,欢迎点分享、收藏、点赞、在看
