
“磁盘”这个词,对于程序员来说并不陌生,我们知道它是一种存储介质,主要用来存储数据的,可以说常用的中间件基本上都离不开它,比如我们常用的MySQL数据库、kafka消息引擎,甚至redis缓存都离不开磁盘。
我们在优化某个业务逻辑的时候,经常需要用到缓存,尽量让热数据都从缓存里读取,因为我们知道磁盘是缓慢的,特别在高并发的场景下,我们要保证极少的请求走磁盘IO。不知道你有没有思考过以下问题:
带着这些疑问,我们一起来看看磁盘相关的知识。
 这是一块普通机械硬盘的内部结构,它的组成并不多,我们重点关注磁盘、磁头臂、磁头就行。
这是一块普通机械硬盘的内部结构,它的组成并不多,我们重点关注磁盘、磁头臂、磁头就行。
先说磁盘,它的样子就像光盘,我们的数据就是存在它里面的,我们其实一般称它为盘片,盘片的表面涂有磁性的记录材料,注意这里不是只有一面可以存数据,盘片的两面都可以存,同时对于一块磁盘来说,通常它是由多个盘片组成的,因此的它组成应该是这样的。
 图中一共有4个盘片,一共8个盘面,其中每个盘面都被画成了一圈一圈的同心圆。
图中一共有4个盘片,一共8个盘面,其中每个盘面都被画成了一圈一圈的同心圆。

这样的一圈一圈的橙色圆我们把它叫做磁道,当然磁道也是由一个个弧段组成的。
 像如图的绿色弧段部分我们叫做扇区,扇区是磁盘组成的最小单位,一般一个扇区可以存储512个字节。
像如图的绿色弧段部分我们叫做扇区,扇区是磁盘组成的最小单位,一般一个扇区可以存储512个字节。

多个盘片相同的磁道,可以组成一个虚拟的圆柱,这个虚拟的圆柱面,我们叫做柱面。
对于一个盘面来说,它的存储容量=单个扇区的大小 * 磁道的扇区数 * 磁道数。
对于一个盘片来说,它有两个面所以一个盘片的容量=2 * 盘面容量。
对于一个磁盘来说,磁盘的容量=盘片的数量 * 单盘片的容量。
说完了盘片,我们来说说磁头,我们的数据是在盘片上的,盘片上的数据并不能直接传输到总线上,因此需要一个媒介,这个媒介就是磁头,磁头可以把某个扇区的数据传输到总线上。
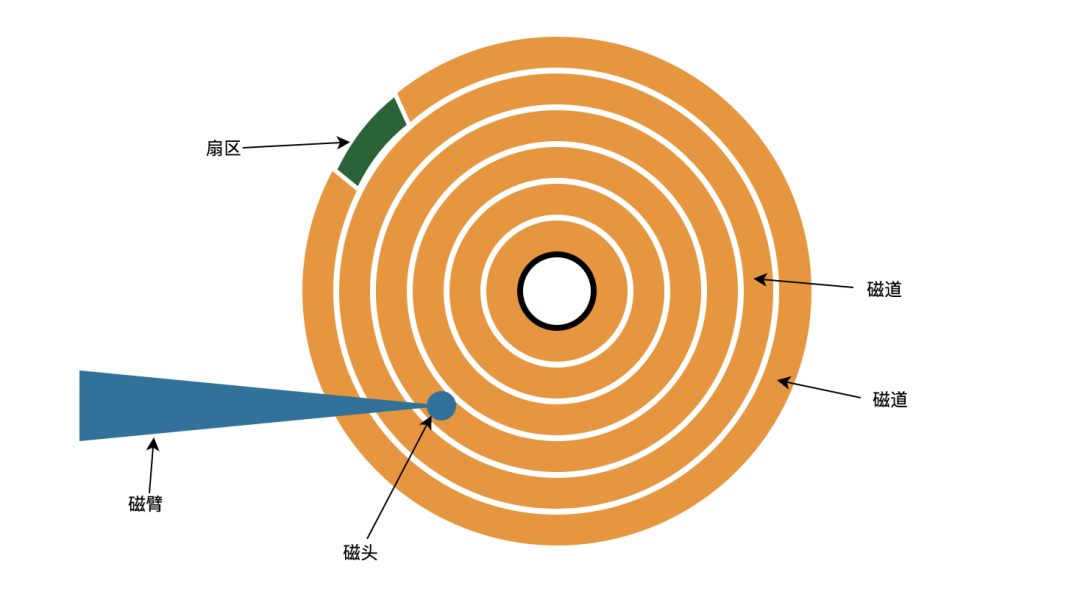 说完了磁头,接下来就是磁臂了,磁头解决了数据读写的问题,但是没有解决读写哪个扇区的问题,这时候就需要磁臂,磁臂可以在一定范围内摆动,来找到目标扇区。
说完了磁头,接下来就是磁臂了,磁头解决了数据读写的问题,但是没有解决读写哪个扇区的问题,这时候就需要磁臂,磁臂可以在一定范围内摆动,来找到目标扇区。

当然磁臂的摆动范围有限,比如磁臂无论怎么摆动也无法摆动到扇区B处,这时就该转动盘片了,你应该听过磁盘的转速,比如7200转/分,这个其实就是转轴来带动盘片的转动的速度,因此最终通过盘片的转动+磁臂的摆动,就可以定位到我们的目标扇区。
搞懂了机械硬盘的物理结构之后,我们接下来看看它有多快。我们知道定位到一条数据需要盘片的转动,还需要磁臂的摆动,这些都是物理的,当我们的磁头定位到具体的扇区之后,读写数据的速度是很快的,因此影响机械硬盘读写速度的主要原因就是这两个物理运动,这两个物理运动对应两个专业名词叫做 平均延时 和 平均寻道时间。
我们先说平均延时,我们上面说到当一个目标扇区不在磁臂的摆动范围之内时,就要转动盘片,以7200转/min的磁盘为例,它每秒可以转动120圈,转一圈就是1/120s=8.33ms左右,那我们定位目标区域的平均耗时是多少呢?以一个磁道为例,它是圆形的,目标节点可以分布在圆上的任何位置。
 比如当我们要找A的时候,可能只需要转一点点,找B的时候,可能要转半圈,找C的时候可能要转将近一圈。所以根据算术平均法可以大致判断平均找到一个目标节点需要转动半圈,这个半圈的时间就是8.33/2=4.17ms,也就是平均延时。
比如当我们要找A的时候,可能只需要转一点点,找B的时候,可能要转半圈,找C的时候可能要转将近一圈。所以根据算术平均法可以大致判断平均找到一个目标节点需要转动半圈,这个半圈的时间就是8.33/2=4.17ms,也就是平均延时。
我们再来看看平均寻道时间,通过盘面的转动我们大致找到了目标区域,但是还没精确定位到,这时候需要磁臂的摆动去定位我们具体的目标扇区,这个摆动的耗时一般是4-10ms。
因此磁盘随机IO大概的耗时就是4.17+4=8.17 ~ 4.17+10=14.14ms,这个数字代表了什么?我们取个折中,假设随机IO的耗时是10ms,那么1s可以做100次随机IO,看到100这个数字,你是不是明白了什么~,这个是真的小,这也是为什么我们对于QPS较高的接口,都要加个缓存层,因为磁盘扛不住啊。
这里科普下,我们上面说的1s内存能做100次随机IO,这个100我们叫做IOPS,即每秒的输入输出量(或读写次数),是衡量磁盘性能的关键指标
我们可以通过iostat,来查看当前机器磁盘的指标:
iostat
KB/t tps MB/s us sy id 1m 5m 15m
23.44 9 0.20 12 8 80 2.40 1.97 1.90
其中tps就是我们当前磁盘的每秒传输次数,当这个数值很大时需要注意。
当然以上都是随机IO,顺序IO就大大不一样了,顺序IO的速度堪比内存的离散读写,总之很快,像大名鼎鼎的kafka就是磁盘顺序IO,所以至少在磁盘读写这块它的性能还不错。顺序IO之所以快,首先盘片不需要每次转动了,其次我们的磁臂也不需要大幅度的摆动去寻道了,因此节省了大量的物理耗时,速度和随机IO之间应该是数量级的差异。
先说个数字,我们日常用的机械硬盘的数据传输率差不多在200MB/s左右,而固态硬盘的传输率差不多在768MB/s,可以发现固态硬盘比普通机械硬盘快了不少,然而这只是在接口是SATA3.0的情况下,我们的固态硬盘还支持PCI Express接口,在这个接口下,固态硬盘的读写能力还会上一个等级,可以达到1GB/s以上,当然这些只是科普知识,作为程序员的我们不用太在意接口相关的知识。
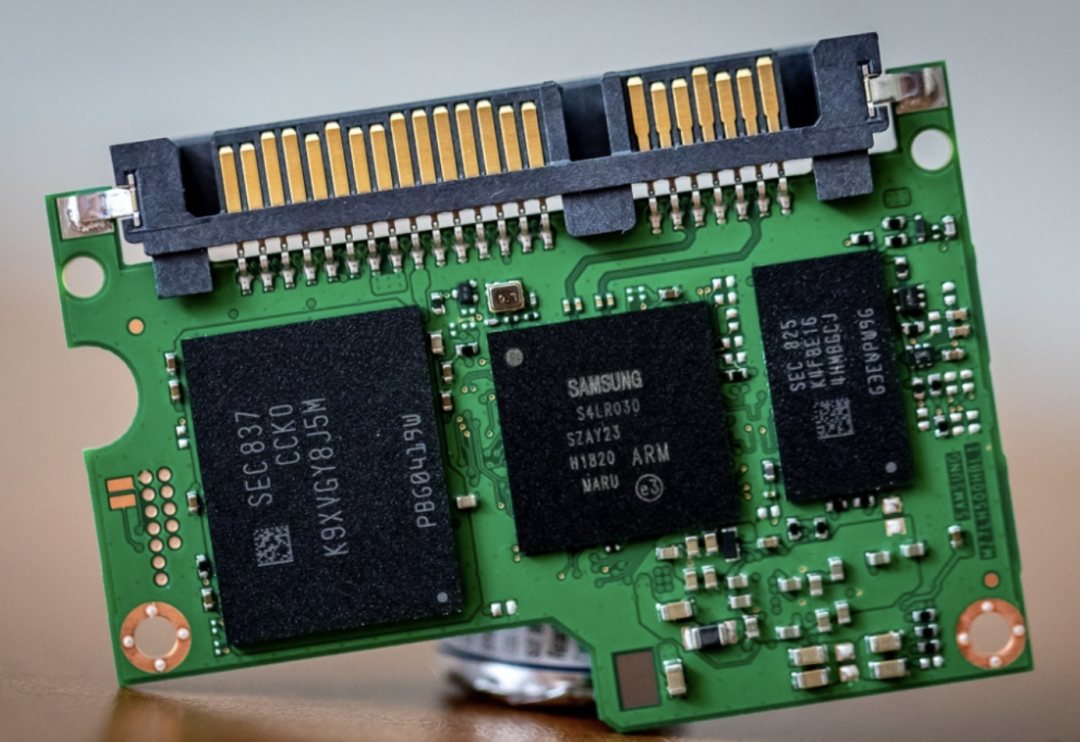
我们还是先从原理开始讲起,固态硬盘的运作方式和机械磁盘一点都不一样,通过上图的内部结构可以看出,固态硬盘并没有盘片、磁臂等机械部件。
那么它是如何存储数据的呢?答案是电容,电容是非常小的电子元件,我们只需要给电容充上电,那么就可以表示比特位1,给电容放电就可以表示比特位0,采用这样方式存储数据的固体硬盘,我们一般称之为使用了SLC的颗粒,全称是 Single-Level Cell,也就是一个存储单元中只有一位数据,那么一块固态硬盘能存储多少数据就完全取决于能放多少电容,因此后来有的工程师发明了更高级的用法,即让一个电容里能放下2个比特位、3个比特位、甚至4个比特位。
那么问题来了一个电容如何表示这个多的比特位?答案是电压,给电容充电的玩意叫做电压计,以能放两位比特位的电容为例,它可以表示00、01、10、11 4个数字,放电状态是00,其余我们只需要充上不同的电压即可。
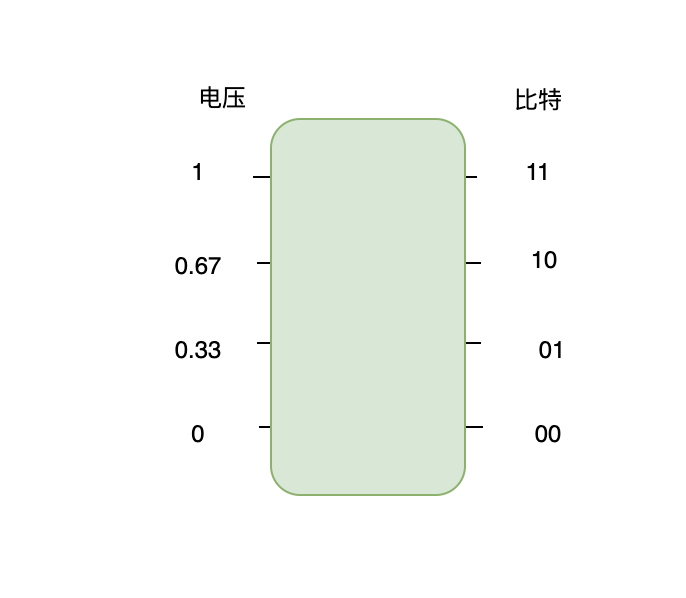 当然想要表示的数字越多,就得充很多不同的电压,因此速度就会相对慢些。
当然想要表示的数字越多,就得充很多不同的电压,因此速度就会相对慢些。
搞懂了固态硬盘的内部结构之后,我们来看看固态硬盘的读写原理,看看为什么固态硬盘的寿命不高。
相比机械硬盘存储数据的盘片,固态硬盘的叫做裸片,裸片之间也是叠放在一起的,以一个裸片为例,它的结构大致如下:
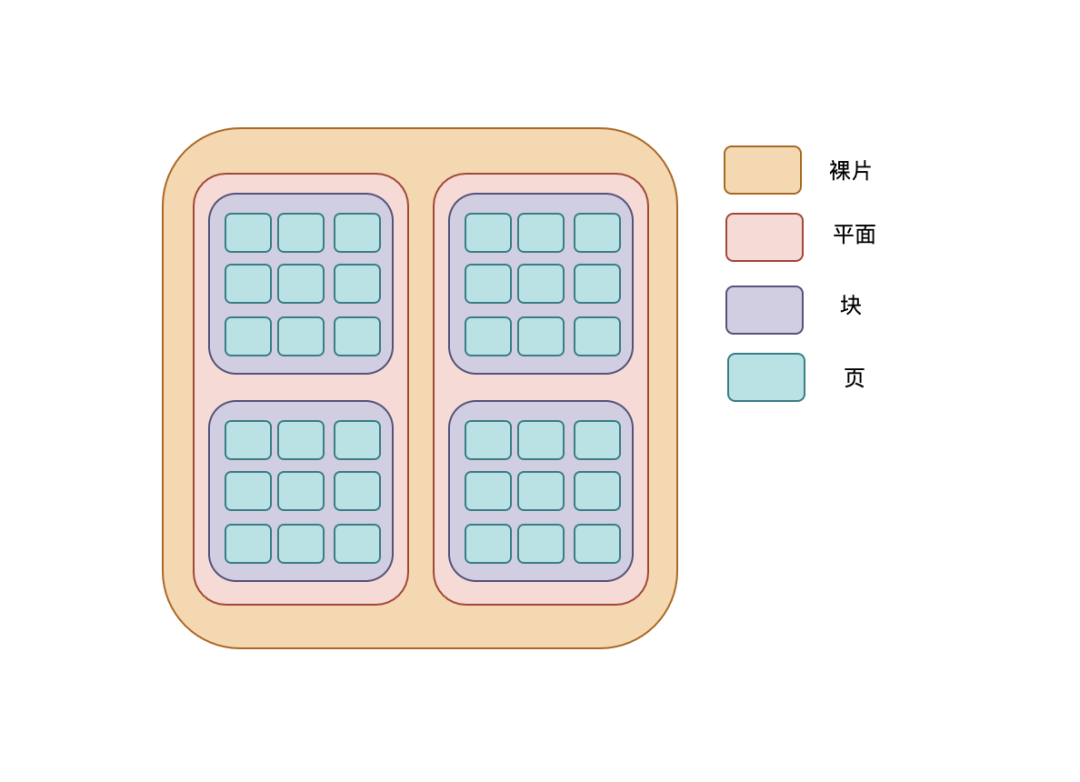 还是划分的概念,首先一张裸片上可以放多个平面,一般一个平面上的存储容量大概是GB级别,然后一个平面上可以分成很多块,一般一个块的存储大小,通常几百KB到几MB大小,一个块里面再就是分很多的页,一个页的大小通常是4KB,我们着重关注下块和页,这和我们接下来要说的固态硬盘的寿命息息相关。
还是划分的概念,首先一张裸片上可以放多个平面,一般一个平面上的存储容量大概是GB级别,然后一个平面上可以分成很多块,一般一个块的存储大小,通常几百KB到几MB大小,一个块里面再就是分很多的页,一个页的大小通常是4KB,我们着重关注下块和页,这和我们接下来要说的固态硬盘的寿命息息相关。
我们知道对于机械硬盘来说,我们写入数据的时候,不会在乎要写入的扇区是否已经有数据,直接覆盖就行了,但是固态硬盘就不一样了,如果某块要写的区域已经有数据了,必须要先擦除,然后才能写入。
这个擦除很关键,因为它就是影响固定硬盘寿命的直接原因,擦的越多寿命就会越来越短,它就像你用一个橡皮擦在一张纸上擦拭一样,擦的多了,纸张也就通了,纸张通了,纸就不能用了。
那么一块固态硬盘可以擦除多少次呢?以单比特电容的模式来说,它大概可以擦除10w次,其他的多比特位的更少,可能只有几千次。因此如果的你业务数据需要经常更新,不太建议使用固态硬盘。
关于擦除数据,还有一点很重要,那就是它是以块为单位的,通过上图我们知道数据存储的最小单位其实是页,页属于块,一个块上有很多的页,如果一个块上的某些页的数据被标记删除了,此时也不能直接擦除这些单独的页,因此这些页就无法被复用,除非整个块上的页都被标记删除了。

如图,页A、页B、页C虽然都是被标记删除的数据,但是因为它所属的块还有其它有效数据,所以当有新数据要写入的时候,它只能写入白色区域未使用的页,并不能利用这些红色区域。但是这样的话,就会出现这样一个问题:随着时间的推移,红色区域会越来越多,也就是碎片越来越多,这样势必会造成浪费。

浪费可耻,因此需要一套紧凑机制,这时候会把相关块的有效数据移动到一个新的块中,让不同块的有效数据更加紧凑的分布,那么对于被移动出数据的块来说,它上面的页要么没数据,要么是标记删除的数据,可以直接对这个块进行擦除,从而达到回收利用的目的。
通过对机械硬盘和固态硬盘的了解,我们再来看看一开始的问题:
end
一口Linux
关注,回复【1024】海量Linux资料赠送
精彩文章合集
文章推荐
点击“阅读原文”查看更多分享,欢迎点分享、收藏、点赞、在看
