

基本原理
自然采样法
规则采样法
单极性
双极性
如何编写程序
总结
SPWM的全称是(Sinusoidal PWM),正弦脉冲宽度调制是一种非常成熟,使用非常广泛的技术;
之前在PWM的文章中介绍过,基本原理就是面积等效原理,即冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相同 。
换句话说就是通过一系列形状不同的窄脉冲信号,相对应时间的积分相等(面积相等),其最终效果相同;
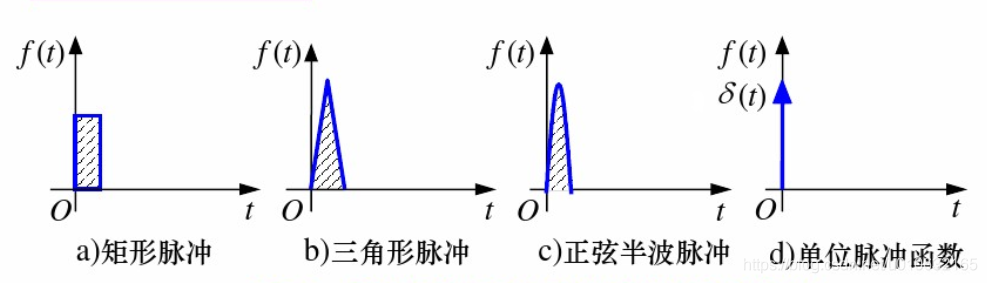
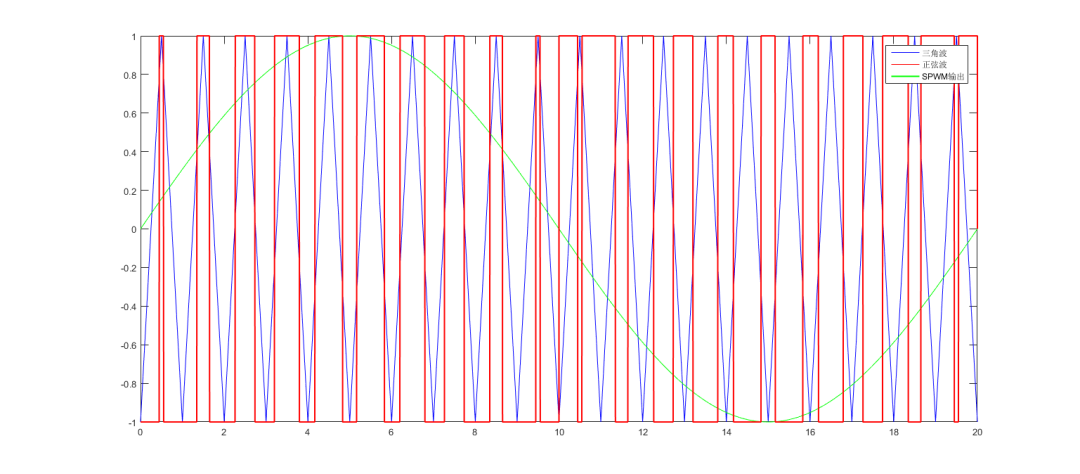
所以SPWM就是输入一段幅值相等的脉冲序列去等效正弦波,因此输出为高的脉冲时间宽度基本上呈正弦规律变化;
这里通常使用的采样方法是:自然采样法和规则采样法;
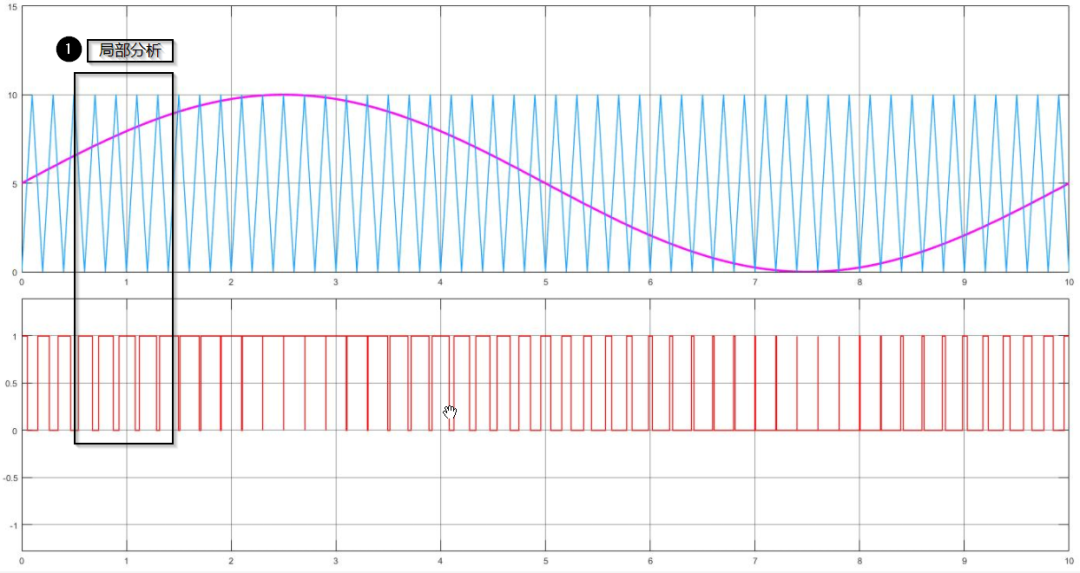
自然采样法是用需要调制的正弦波与载波锯齿波的交点,
来确定最终PWM脉冲所需要输出的时间宽度,最终由此生成SPWM波;
具体如下图所示,这里会对局部①部分进行简单分析,下面进一步介绍;
局部①的情况如下图所示;简单分析一下整个图形的情况;
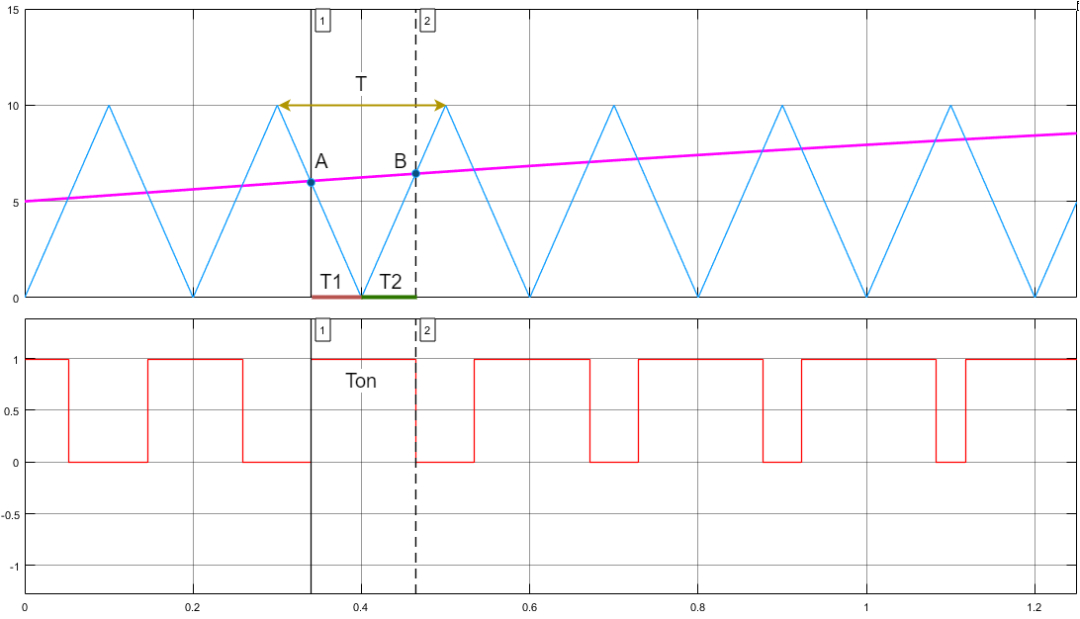
这里对于求解A,B位置的推导不做介绍,但是计算量比较大,因此在微处理器中进行运算会占用大量资源,下面再介绍另一种优化的采样方法:规则采样法。
根据载波PWM的电压极性,一般可以分为单极性SPWM和双极性SPWM;下面进一步介绍;
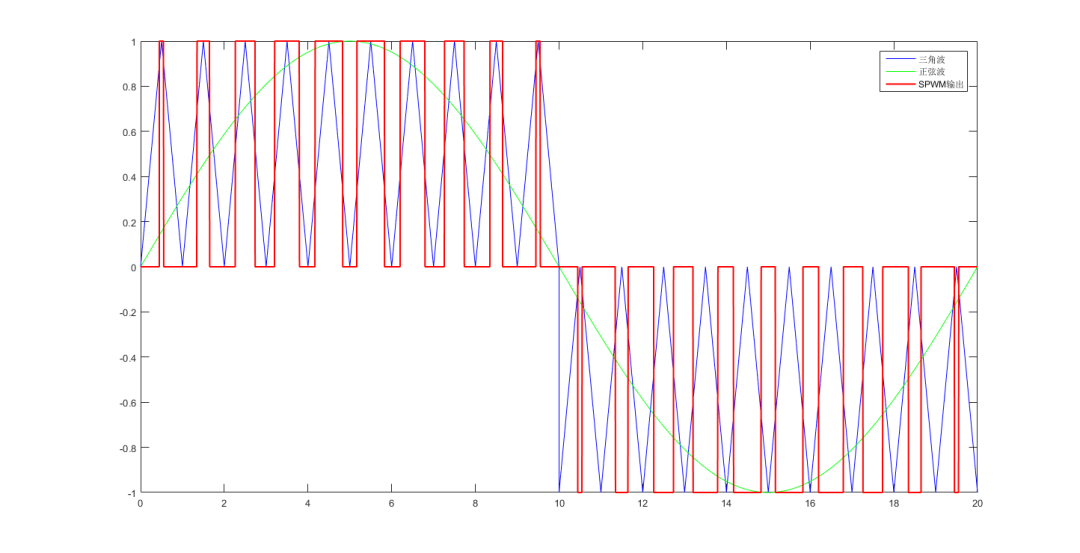
单极性SPWM在正弦波的正版周期,PWM只有一种极性,在正弦波的负半周期,PWM同样只有一种极性,但是与正半周期恰恰相反,具体如下图所示;
下面取正弦波的正半周期的情况进行分析;
正弦波的正半周期整体如下所示;由图中我们可以知道以下几点;

具体的推导过程如下:
第一步:由于O点的位置比较好确认,因此,线段
第二步:这里载波锯齿波的最大幅值为1,因此线段
第三步:根据初中学过的相似三角形定理,满足:
最终简化得到:
这里对载波的幅值做了归一化处理,如果锯齿波的最大值为,正弦波的幅值最大为,则;
只要符合面积等效原理,PWM还可以是双极性的,具体如下图所示;这种调制方式叫双极性SPWM,在实际应用中更为广泛。
上面讲到这里PWM的时间满足:
其中为正弦波幅值,为载波锯齿波幅值;
那么下面以STM32为例,介绍以下如何进行程序编写;
首先得先STM32是如何产生PWM?
通过数据手册可以知道,STM32通过TIM输出PWM,这里有几个寄存器;
可能这么说,还是云里雾里的,先看下图;
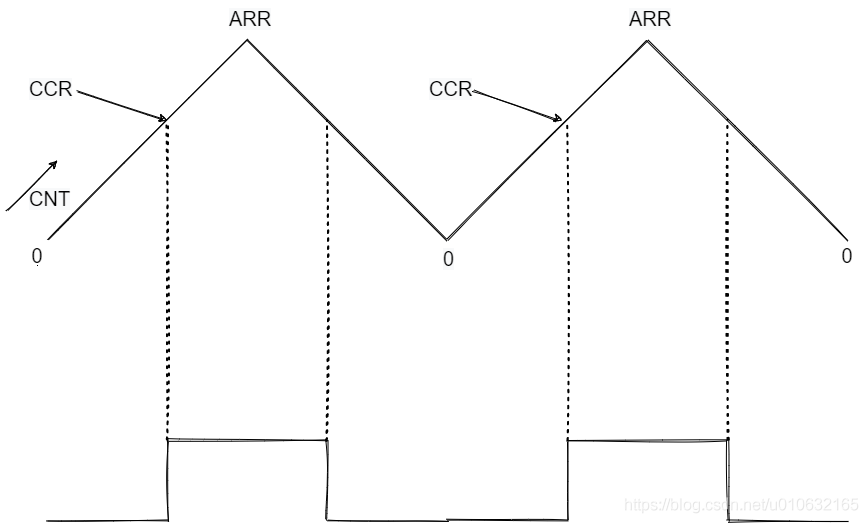
STM32中PWM的模式有普通的PWM,和中央对齐的PWM,上图使用的就是中央对齐PWM;
产生PWM的过程可以分为以下几个过程;
程序中如何实现?
从上述STM32产生PWM的过程中不难发现,满足;
上一节推导的公式如下:
结合①式和②式,可以得到:
上面公式中用CCR表示CCR寄存器中的值,ARR表示ARR寄存器中的值;
最后需要做的三件事
正弦函数表:
const uint16_t indexWave[] = {
0, 9, 18, 27, 36, 45, 54, 63, 72, 81, 89, 98,
107, 116, 125, 133, 142, 151, 159, 168, 176,
184, 193, 201, 209, 218, 226, 234, 242, 249,
257, 265, 273, 280, 288, 295, 302, 310, 317,
324, 331, 337, 344, 351, 357, 364, 370, 376,
382, 388, 394, 399, 405, 410, 416, 421, 426,
431, 436, 440, 445, 449, 454, 458, 462, 465,
469, 473, 476, 479, 482, 485, 488, 491, 493,
496, 498, 500, 502, 503, 505, 506, 508, 509,
510, 510, 511, 512, 512, 512, 512, 512, 512,
511, 510, 510, 509, 508, 506, 505, 503, 502,
500, 498, 496, 493, 491, 488, 485, 482, 479,
476, 473, 469, 465, 462, 458, 454, 449, 445,
440, 436, 431, 426, 421, 416, 410, 405, 399,
394, 388, 382, 376, 370, 364, 357, 351, 344,
337, 331, 324, 317, 310, 302, 295, 288, 280,
273, 265, 257, 249, 242, 234, 226, 218, 209,
201, 193, 184, 176, 168, 159, 151, 142, 133,
125, 116, 107, 98, 89, 81, 72, 63, 54, 45, 36,
27, 18, 9, 0
};
中断服务函数:
extern uint16_t indexWave[];
extern __IO uint32_t rgb_color;
/* 呼吸灯中断服务函数 */
void BRE_TIMx_IRQHandler(void)
{
static uint16_t pwm_index = 0; //用于PWM查表
static uint16_t period_cnt = 0; //用于计算周期数
static uint16_t amplitude_cnt = 0; //用于计算幅值等级
if (TIM_GetITStatus(BRE_TIMx, TIM_IT_Update) != RESET) //TIM_IT_Update
{
amplitude_cnt++;
//每个PWM表中的每个元素有AMPLITUDE_CLASS个等级,
//每增加一级多输出一次脉冲,即PWM表中的元素多使用一次
//使用256次,根据RGB颜色分量设置通道输出
if(amplitude_cnt > (AMPLITUDE_CLASS-1)){
period_cnt++;
//每个PWM表中的每个元素使用period_class次
if(period_cnt > period_class){
//标志PWM表指向下一个元素
pwm_index++;
//若PWM表已到达结尾,重新指向表头
if( pwm_index >= POINT_NUM){
pwm_index=0;
}
//重置周期计数标志
period_cnt = 0;
}
//重置幅值计数标志
amplitude_cnt=0;
}else{
//每个PWM表中的每个元素有AMPLITUDE_CLASS个等级,
//每增加一级多输出一次脉冲,即PWM表中的元素多使用一次
//根据RGB颜色分量值,设置各个通道是否输出当前的PWM表元素表示的亮度
//红
if(((rgb_color&0xFF0000)>>16) >= amplitude_cnt) {
//根据PWM表修改定时器的比较寄存器值
BRE_TIMx->BRE_RED_CCRx = indexWave[pwm_index];
}else{
//比较寄存器值为0,通道输出高电平,该通道LED灯灭
BRE_TIMx->BRE_RED_CCRx = 0;
}
//绿
if(((rgb_color&0x00FF00)>>8) >= amplitude_cnt){
//根据PWM表修改定时器的比较寄存器值
BRE_TIMx->BRE_GREEN_CCRx = indexWave[pwm_index];
}else{
//比较寄存器值为0,通道输出高电平,该通道LED灯灭
BRE_TIMx->BRE_GREEN_CCRx = 0;
}
//蓝
if((rgb_color&0x0000FF) >= amplitude_cnt){
//根据PWM表修改定时器的比较寄存器值
BRE_TIMx->BRE_BLUE_CCRx = indexWave[pwm_index];
}else{
//比较寄存器值为0,通道输出高电平,该通道LED灯灭
BRE_TIMx->BRE_BLUE_CCRx = 0;
}
//必须要清除中断标志位
TIM_ClearITPendingBit (BRE_TIMx, TIM_IT_Update);
}
}
}
本文简单介绍了SPWM的原理和调制方法,推导了SPWM的PWM脉冲宽度的计算时间,最后给出了基于STM32单片机产生SPWM驱动呼吸灯的部分代码,完整代码关注公众号私信发送SPWM获取。
由于作者能力和水平有限,文中难免存在错误和纰漏,请不吝赐教。
一篇很棒的C语言入门笔记,值得收藏!
单片机I/O口驱动,为什么一般都选用三极管而不是MOS管?
半桥电路的死区时间
5分钟带你了解D类功放
后台回复加群,管理员拉你入技术交流群。
