文章版权所有,未经授权请勿转载或使用
本系列上篇文章《一文详解自动驾驶的运行设计域(ODD)》解读了什么是自动驾驶ODD,本篇文章依据SAE J3016详细解读自动驾驶DDT、DDT fallback、OEDR概念,后续两篇文章将介绍低速自动驾驶(LSAD)和驾驶自动化分级。
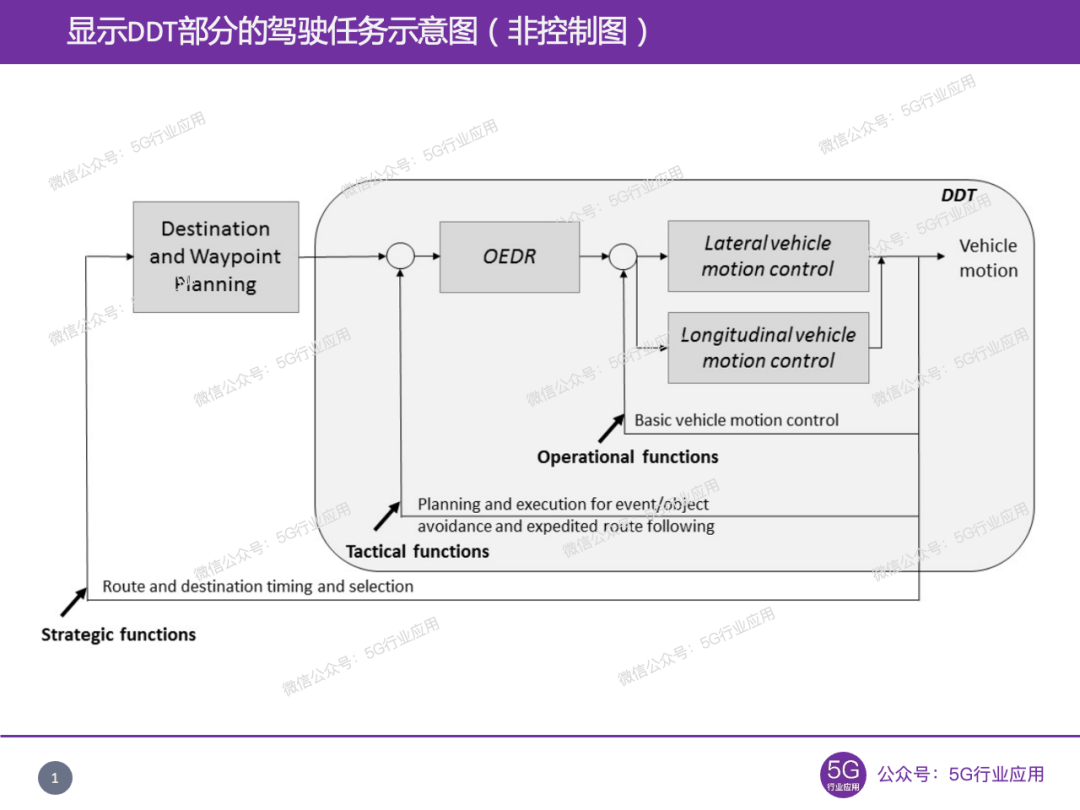
动态驾驶任务DDT(Dynamic Driving Task)是在道路交通中操作车辆所需的所有实时操作和策略功能,不包括行程安排和目的地和航路点选择等战略功能,包括但不限于以下子任务:
c) 通过目标和事件检测、识别、分类和响应准备(操作和策略)监控驾驶环境; f) 通过照明、鸣笛、信号、手势等(策略)增强醒目性。其中子任务c)和d)统称为对象和事件检测与响应(OEDR)。下图显示了驾驶任务的示意图。驾驶的整体行为可分为三种类型:战略、策略和操作(Michon,1985)。战略工作涉及行程规划,如决定是否、何时何地、如何行驶、最佳路线等。策略工作涉及在交通行程中操纵车辆,包括决定是否和何时超车或改变车道、选择适当的速度、检查后视镜等。操作工作涉及可被视为预知或先天的瞬间反应,例如对转向、制动和加速进行微小修正,以保持交通中的车道位置,或避免车辆道路的突然障碍或危险事件。
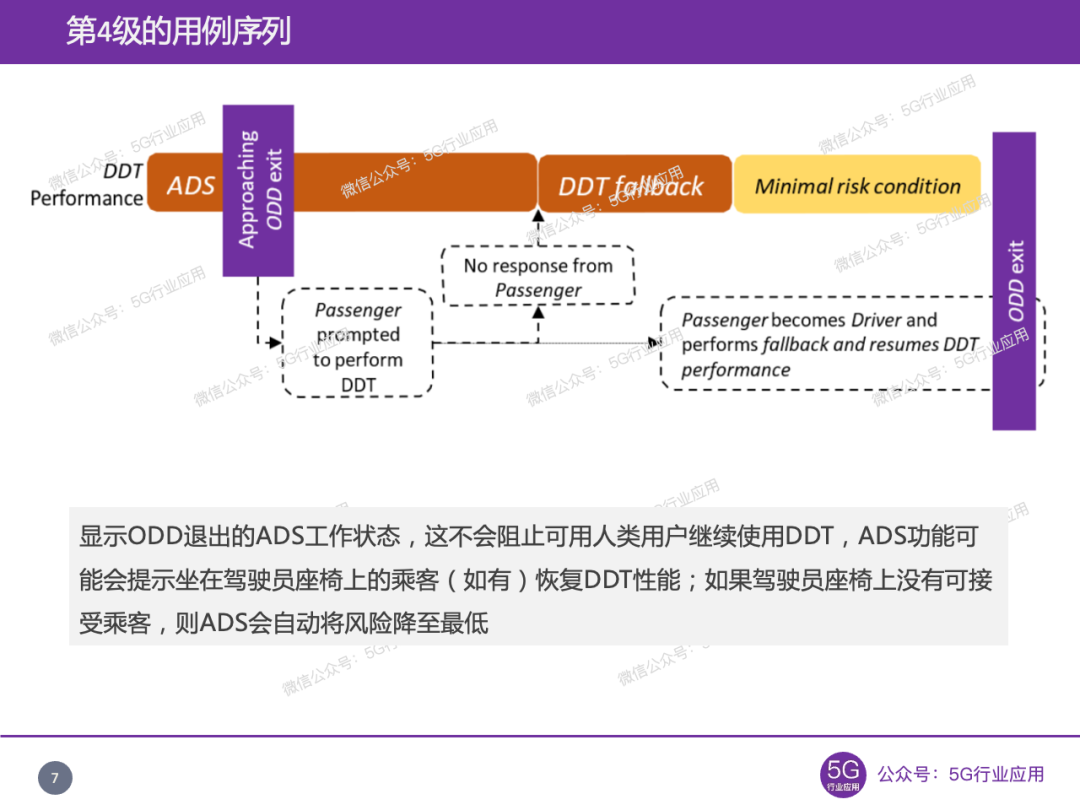
就DDT性能而言,L1级驾驶自动化包括最内部环路部分的自动化(横向车辆运动控制功能或纵向车辆运动控制功能,以及与给定车辆运动控制轴相关的有限OEDR);L2级驾驶自动化包括最内部环路的自动化(车辆横向和纵向运动控制,以及与车辆运动控制相关的有限OEDR);L3至L5级驾驶自动化包括两个内部环路的自动化(车辆横向和纵向运动控制,以及完整OEDR)。注意,DDT性能不包括驾驶的战略方面(例如,确定是否、何时和何地行驶)。[1]动态驾驶任务接管DDT fallback(Dynamic Driving Task fallback)是在相同情况下,用户对实施DDT或达到最低风险条件的响应(1)在发生DDT性能相关系统故障后,或(2)在ODD退出时,或ADS对达到最低风险条件的响应。
最小风险条件MRC(Minimal Risk Condition)是一种稳定、停止的状态,当给定的行程不能或不应继续时,用户或ADS(Automated Driving System)可在执行DDT接管后驾驶车辆,以降低碰撞风险。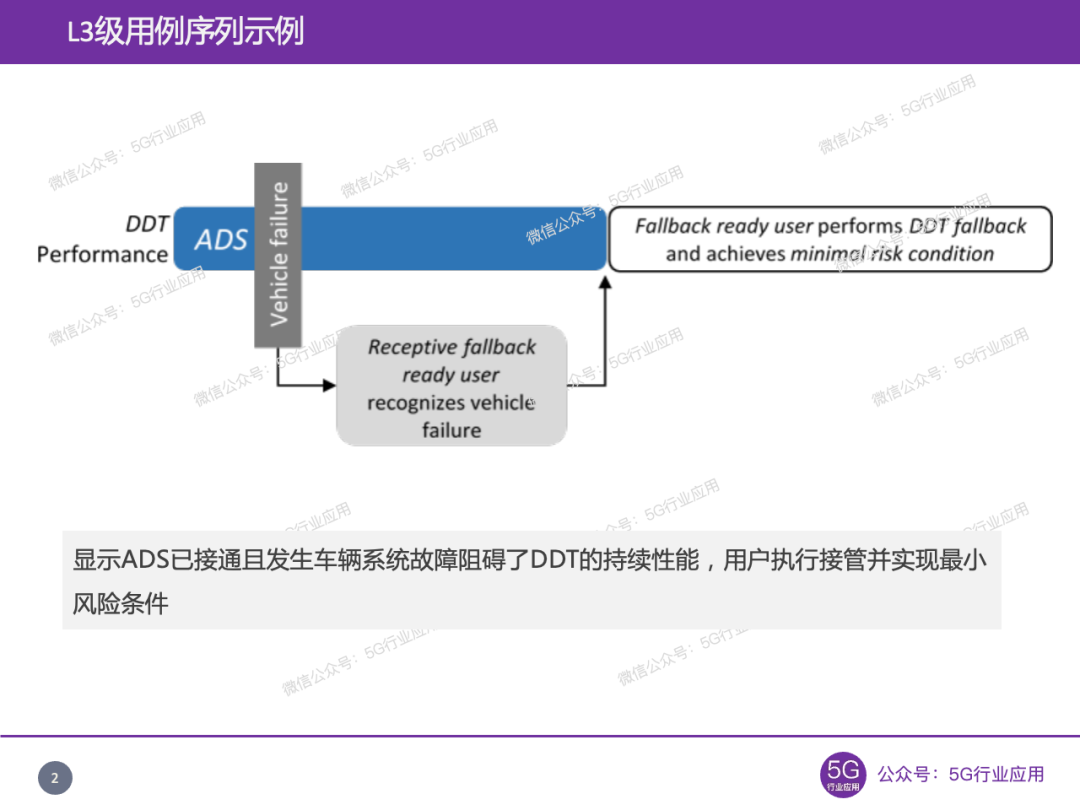
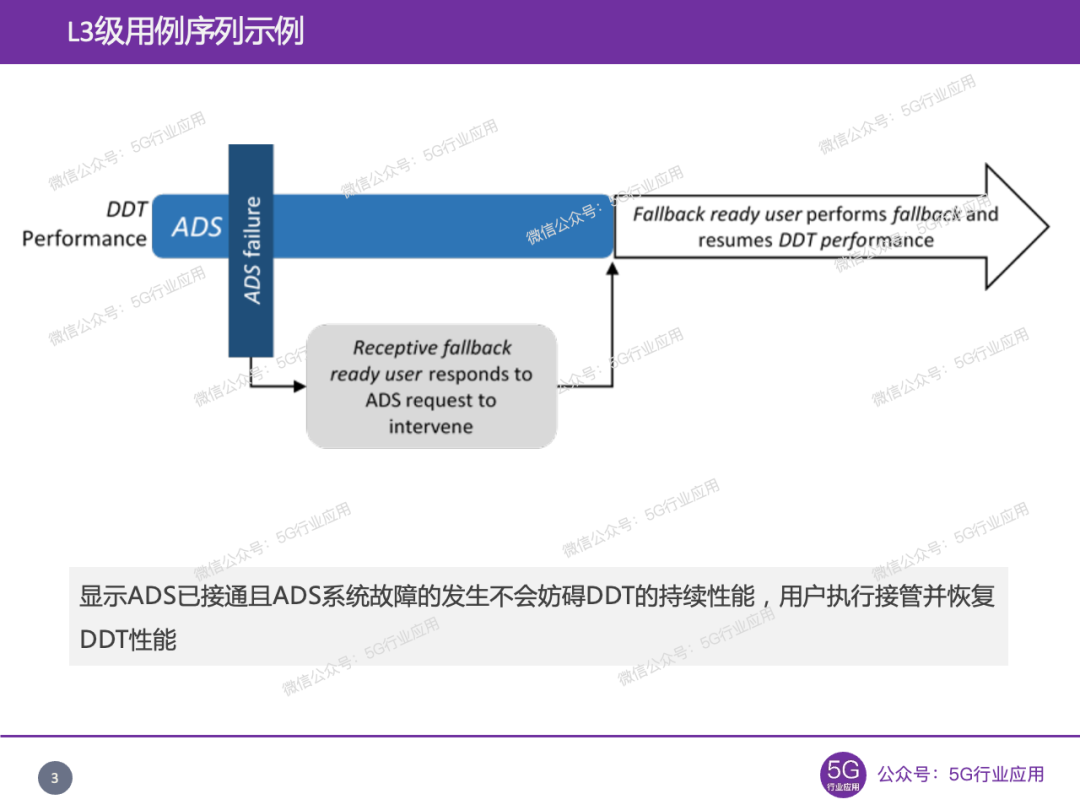
L3级、L4级或L5级ADS的系统故障或超出ODD条件时,区分以下三个单独的功能:(i)DDT性能,(ii)DDT接管性能,以及(iii)实现最小风险条件。
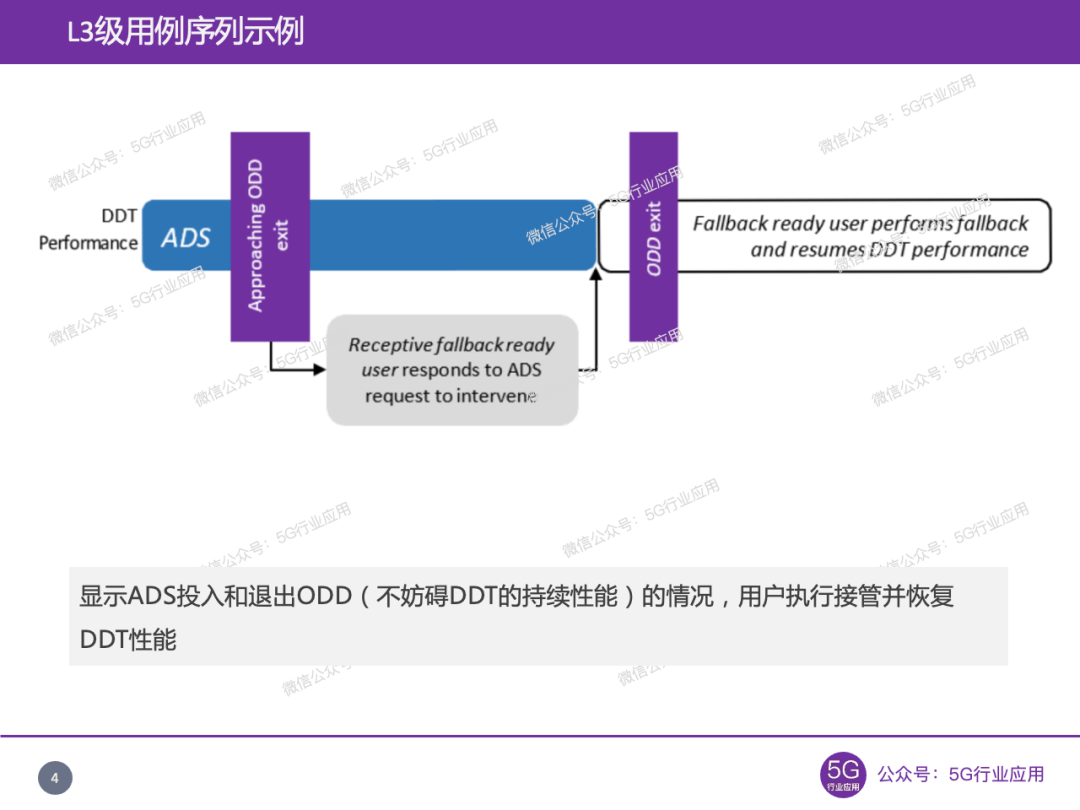
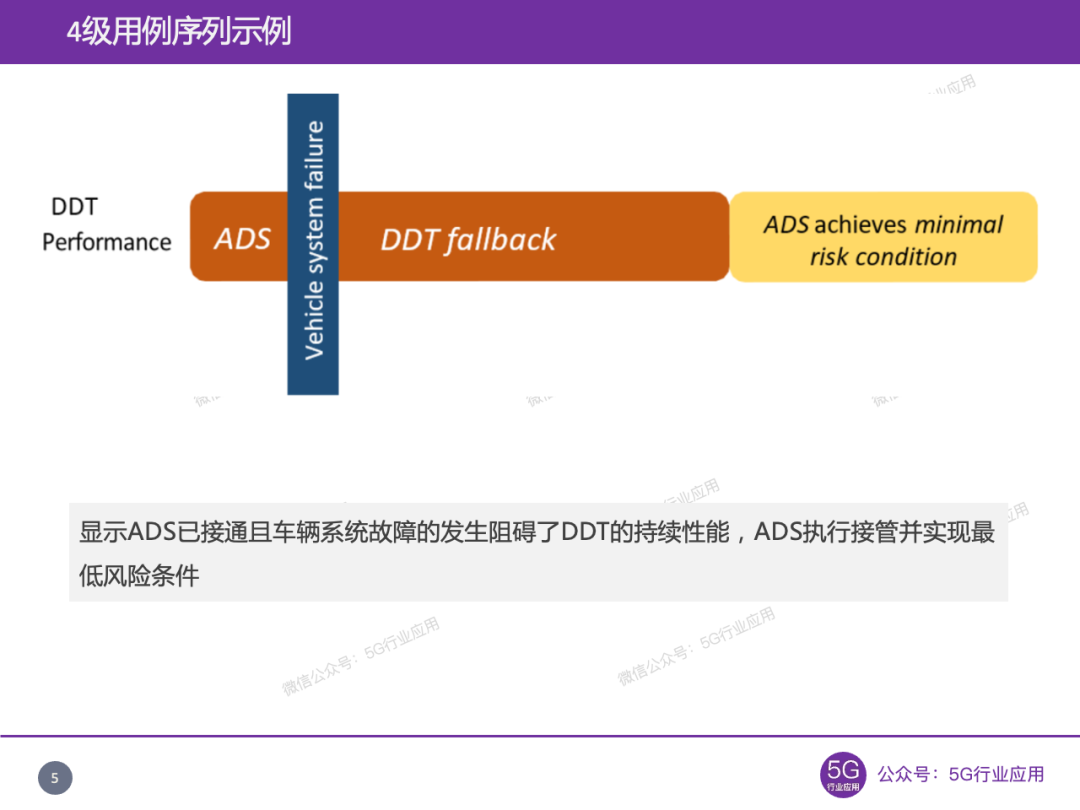
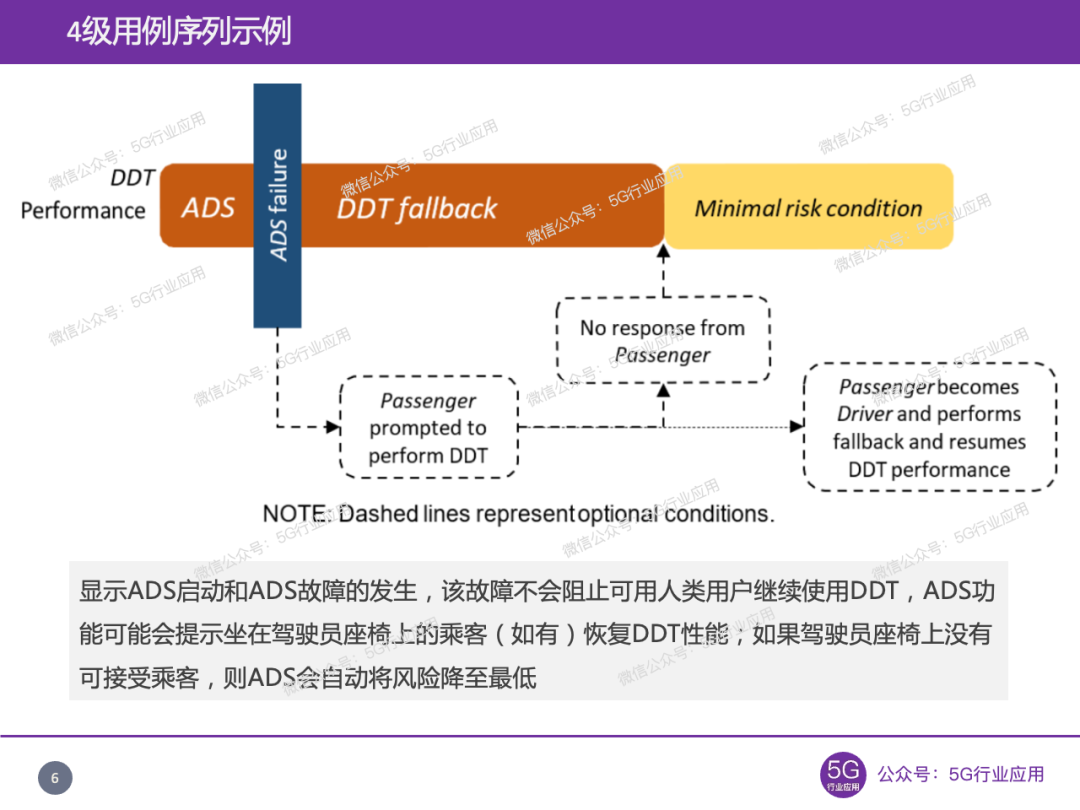
a) DDT性能发生在ADS功能常规/正常操作条件下,也就是说,该功能在正常运行和ODD(如果有的话)范围内执行完整的DDT。b) 当ADS无法继续执行完整的DDT(即在常规/正常操作下)时,会发生DDT接管。对于L3级ADS功能,人类应急准备用户(车内或远程)将响应干预请求或动觉明显的车辆故障,如果车辆保持可操作,则恢复DDT性能,如果车辆不可操作,则实现最低风险条件。对于L4级或L5级ADS,该功能或系统通过自动达到最低风险条件来执行应急措施,例如,停到路肩上,打开危险指示灯,禁用推进系统,并呼叫路边救援。(注:某些L3级功能可设计为在某些情况下自动执行接管,并实现最低风险条件,如无障碍物的相邻路肩存在时,但在其他情况下,如无此类路肩可用时,则不适用。)当ADS执行接管时,它将车辆操纵到最小风险条件,从而结束接管响应。然而,当接管准备就绪的用户执行接管时,若车辆可操作,他/她可以继续手动操作车辆,而不是达到最低风险条件。c) L4级和L5级的接管性能和最低风险条件要求ADS在发生DDT性能相关系统故障或超出ODD条件后仍能正常工作。如果ADS不起作用,可采用故障缓解策略。最小风险条件取决于触发接管时的车辆状况及其运行环境,并可能遵循降级模式策略,该策略考虑了与持续运行、驶离道路或原地停车相关的相对风险。[1]目标和事件检测与响应OEDR(Object and Event Detection and Response)是DDT的子任务,包括监控驾驶环境(检测,识别和分类对象和事件,并准备按需要做出响应),并对这些对象和事件执行适当的响应(即根据需要完成DDT和/或DDT接管)。[2]
与OEDR特别相关的ADS功能架构元素通常包括支持以下功能的硬件和软件组件。- 世界建模(例如,持久数据映射、动态障碍跟踪和预测等);
- 导航和规划(例如,执行响应的路径规划和运动控制命令)。
OEDR行为能力主要包括a) OEDR车辆;b) OEDR交通管制装置和基础设施;c) OEDR弱势交通参与者、物体、动物。▼表1 OEDR行为能力
OEDR车辆 | •检测并响应入侵、迎面而来的车辆、车辆跟驰 •检测并响应相关停车车辆,包括车道内或路边的车辆 •检测和响应车道变化,包括意外切入 •检测并响应切出,包括意想不到的情况 •检测并响应校车 •检测和响应紧急车辆,包括在十字路口 •检测并响应车辆进入道路 •检测并响应两侧相邻车辆 •在前进和倒车时检测并响应相关车辆 |
OEDR交通管制装置和基础设施 | •遵守驾驶规则 •检测并响应限速变化或建议 •检测并响应相关的通行限制,包括单行道、禁止转弯位置、自行车道、中转车道和人行道(更多完整列表,请参见MUTCD)) •检测并响应相关交通控制设备,包括信号交叉口、停车标志、让行标志、人行横道和车道标记(可能包括褪色标记)(更多完整列表见MUTCD) •检测和响应基础设施要素,包括弯道、道路边缘和护栏(更多完整列表见AASHTO绿皮书) |
OEDR弱势交通参与者、物体、动物 | |
对象和事件的检测可能以多种方式发生。
a) ADS可能会使用一套感知传感器,其中可能包括毫米波雷达、激光雷达、摄像头和超声波传感器的组合,这些传感器可以支持对这些物体和事件的检测和识别。该路径依赖于支持算法来解析和解释这些传感器提供的数据。b) V2V和V2I通信能力,通过DSRC/C-V2X或其他技术,也可以在一定容量下支持检测和识别。c) SAE J2735基本安全信息包括有关车辆位置、速度和航向的信息,这些信息可以补充或增强ADS车载感知传感器的测量。d) 其他数据,如交叉口信号、相位和计时数据可以通过数字基础设施广播,以提供交通信号状态的信息。e) 许多正在开发的ADS依赖于事先收集和优化的车载高精度数字地图。这些地图可能包含有关静态对象和基础设施(包括道路本身)的三维信息。地图还可能包括重要的导航元数据,例如路段上的车道数和其他重要的车道特征(例如方向性、左转、仅限公共汽车)、速度限制以及交通控制装置或标记(例如停车标志、交通信号、人行横道)。类似地,该地图信息可用于补充或增加ADS的车载传感器数据(反之亦然),或可单独用于支持特定对象和事件的检测。假设ADS已正确检测到安全关键对象或事件,则它将执行适当的响应。理想情况下,响应应为稳定的控制动作或机动,使ADS能够与附近的所有相关障碍物保持安全的避让距离,并尽可能继续遵守适用的道路规则和礼仪。符合这些标准的已确定响应包括: a) 跟车-实施横向和/或纵向控制措施,以保持与直接领先车辆的安全跟车距离,同时继续沿着当前行驶车道行驶; b) 加速-在适当和合法的情况下,实施纵向控制措施以提高速度; c) 减速-实施纵向控制措施以降低速度(视情况而定); d) 停止-执行纵向控制动作,以安全稳定的方式减速至完全停止; f) 改变车道–实施纵向和/或横向控制措施,以转入相邻车道;——中止换道–取消切换到相邻车道的操作(保持或返回原始车道); g) 超车–实施纵向和/或横向控制措施,以驶入相邻车道,加速至所需速度;——中止通行–取消机动以切换到相邻车道(保持或返回原始车道); h) 转弯-实施横向和纵向控制措施,从当前道路/车道过渡到连接道路/车道; i) 在车道内移动–实施横向和/或纵向控制措施,使ADS不跟随当前车道的中心(或接近中心),但完全保持在当前车道内; j) 驶出车道-实施横向和/或纵向控制措施,使ADS部分或完全驶出当前行驶车道(即一个或多个车轮穿过车道边界); k) 驶出行车道/停车–实施横向和纵向控制措施,使ADS完全退出当前活动行车道,进入路肩或停车车道并停车;——向后备准备用户返回控制–向人类乘员/驾驶员返回纵向和横向控制(同时提供足够的警告);——ADS实施最小风险机动-实施横向和/或纵向控制行动,以实现最小风险条件。
SOA架构与传统EEA在开发流程、方法上有哪些区别
关于DTC诊断故障码的获取与清除
沃尔沃:敏捷开发中满足ISO26262的软件安全分析
近万字的NvM学习笔记
特斯拉最新的12V蓄电池有什么不同?
特斯拉最新中央计算模块(CCM)解析
关于对自动驾驶传感器的理解
特斯拉的电池管理系统 (BMS) 相比其他电动车有哪些优势?
2021款特斯拉Model Y ECU接口梳理
详解CANoe之CAPL编程
关于CAN时间同步的理解
dbc文件的格式以及创建详解
大众ID.4 X网络架构详解
学习笔记——NVM数据处理机制
学习笔记——AUTOSAR NVM基础知识
基于UDS的Bootloder详解
关于整车上下电流程的理解
一文详解CAN总线错误帧|附下载
DoIP协议介绍,资料分享!
详解车载网络 OTA系统的开发|文末附下载
一文了解汽车嵌入式AUTOSAR架构|附下载
特斯拉Autopilot系统安全研究|附dbc下载