关注、星标公众号,直达精彩内容

来源:安富莱电子
最近因为项目选型需要,开始用了stm32H750vbt6这款MCU,我一直提倡工欲善其事,必先利其器,尤其是在嵌入式开发中,所以看到armfly有这样的好东西,就整理了一下,希望对大家有帮助。
本章节为大家介绍终极调试方案Event Recoder,之所以叫终极解决方案,是因为所有Link通吃,支持时间测量,功耗测量,printf打印,RTX5及其所有中间件调试信息展示。
只要是MDK支持的调试下载器,基本都支持Event Recorder,本教程测试了JLINK,STLINK和CMSIS-DAP。
务必使用MDK5.25及其以上版本。
使用ARM_Compiler 软件包V1.4.0及其以上版本。详情看此贴:http://www.armbbs.cn/forum.php?mod=viewthread&tid=87175。
CMSIS软件包 要是使用V5.3.0及其以上版本,详情本教程8.3小节末尾的说明。
如果大家的MDK5.X应用不是很熟练的话,可以看论坛网友翻译的MDK5.X入门手册:http://www.armbbs.cn/forum.php?mod=viewthread&tid=31288。如果觉得看手册上手慢的话,可以直接看KEIL官方做的MDK入门系列视频,带中文字幕:http://www.armbbs.cn/forum.php?mod=viewthread&tid=82667 。
为了实现Event Recorder组件的最高性能,最好将下载器的时钟速度设置到所支持的最大值,另外,根据需要加大EventRecorderConf.h文件中的缓冲大小,默认可以缓冲64个消息(动态更新的FIFO空间)。
此调试组件不需要用到SWO引脚,使用标准的下载接口即可。以我们的开发板为例,用到VCC,GND,SWDIO,SWCLK和NRST。大家使用三线JLINK-OB也是没问题的,仅需用到GND,SWDIO和SWCLK。
前面的专题教程中为大家讲解了使用SEGGER的RTT功能来替代串口打印,比较方便。只是这种方法限制用户必须使用JLINK才可以。而使用Event Recorder的话,无此限制,各种LINK通吃。只要是MDK支持的即可。
Event Recorder是MDK在5.22版本的时增加的功能,到了5.25版本后,这个功能就更加完善了,增加了时间测量和功耗测量的功能。
此调试组件不需要用到SWO引脚,使用标准的下载接口即可。以我们的开发板为例,用到VCC,GND,SWDIO,SWCLK和NRST。大家使用三线JLINK-OB也是没问题的,仅需用到GND,SWDIO和SWCLK。
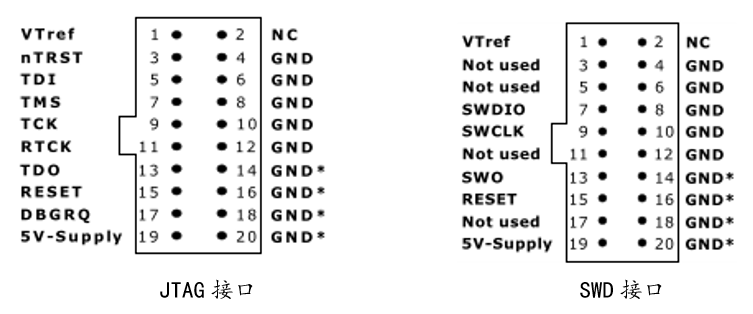
JTAG接口和SWD接口区别
下图分别是20pin的标准JTAG引脚和SWD( Serial Wire Debug)引脚,一般SWD接口仅需要Vref,SWDIO,SWCLK,RESET和GND五个引脚即可,SWO(Serial Wire Output)引脚是可选的。有了SWO引脚才可以实现数据从芯片到电脑端的数据发送。
词条 SWV(Serial Wire Viewer)
SWV是由仪器化跟踪宏单元ITM(Instrumentation Trace Macrocell)和SWO构成的。SWV实现了一种从MCU内部获取信息的低成本方案,SWO接口支持输出两种格式的跟踪数据,但是任意时刻只能使用一种。两种格式的数据编码分别是UART(串行)和Manchester(曼彻斯特)。当前JLINK仅支持UART编码,SWO引脚可以根据不同的信息发送不同的数据包。当前M3/M4可以通过SWO引脚输出以下三种信息:
ITM支持printf函数的debug调用(工程需要做一下接口重定向即可)。ITM有32个通道,如果使用MDK的话,通道0用于输出调试字符或者实现printf函数,通道31用于Event Viewer,这就是为什么实现Event Viewer需要配置SWV的原因。
数据观察点和跟踪DWT(Data Watchpoint and Trace)可用于变量的实时监测和PC程序计数器采样。
ITM 还附带了一个时间戳的功能:当一个新的跟踪数据包进入了ITM的FIFO 时,ITM 就会把一个差分的时间戳数据包插入到跟踪数据流中。跟踪捕获设备在得到了这些时间戳后,就可以找出各跟踪数据之间的时间相关信息。另外,在时间戳计数器溢出时也会发送时间戳数据包。
Event Recorder的特色主要有以下几点:
提升应用程序动态执行期间的检测能力。
支持的事件类型滤除机制,比如运行错误、API调用、内部操作和操作信息的区分。
可以在任务中、RTOS内核中和中断服务程序中任意调用。
对于带ITM功能的Cortex-M3/M4/M7/M33内核芯片,执行记录期间,全程无需开关中断操作。对于不带ITM功能的Cortex-M0/M0+/M23,是需要开关中断的。
支持printf重定向。
各种link通吃,支持SWD接口或者JTAG接口方式的JLINK、STLINK、ULINK和CMSIS-DAP。
对于带DWT时钟周期计数器功能的Cortex-M3/M4/M7/M33内核芯片,创建时间戳时,可以有效降低系统负担,无需专用定时器来实现。
Event Recorder执行时间具有时间确定性,即执行的时间是确定的,而且执行速度超快,因此,实际产品中的代码依然可以带有这部分,无需创建debug和release两种版本。
RTX5及其所有中间件都支持Event Recorder调试。
首先来看下面这张图:
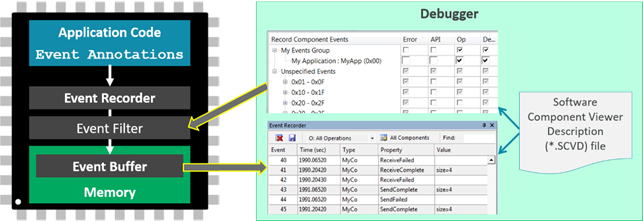
在截图的左下角有个Memory内存区,在这个内存区里面有一个缓冲Event Buffer,其实就是一个大数组。MDK通过访问这个数组实现消息的图形化展示。为了正确的图形化展示,数组缓冲里面的数据就得有一定的数据格式。而这个数据格式就是通过左侧截图里面的Event Recorder和Event Filter来实现的。Event Recorder的API实现数据记录和整理,Event Filter的API实现数据的筛选,从而可以选择哪些数据可以在MDK的Event Recorder调试组件里面展示出来。
这就是Event Recorder的基本工作流程。
Event Statistics提供的时间测量功能简单易用,在测试代码前后加上测量函数即可:
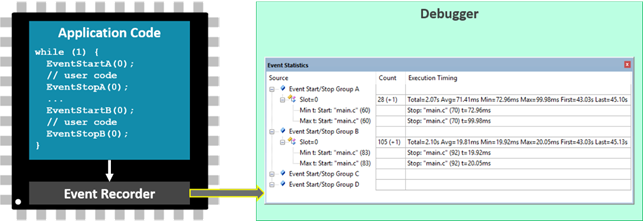
在本章教程程的8.6小节为大家详细进行了讲解。通过这个时间测量功能,用户可以方便测试代码的执行时间,从而根据需要,进行合理的优化,提高代码执行效率。
Event Statistics提供的功耗测量功能,当前只有KEIL的ULINKplus支持此功能,由于ULINKplus价格不便宜,一套5000多,大家作为了解即可,实际效果如下:
每条Event Recorder消息是由16字节的数据组成,32位的ID,32位的时间戳,两个32位的数据,共计16个字节。其中32位ID最重要,格式如下: 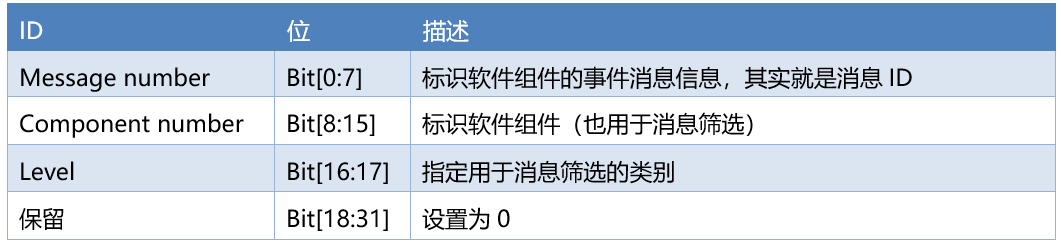
Level指定消息分类,主要用于消息筛选: 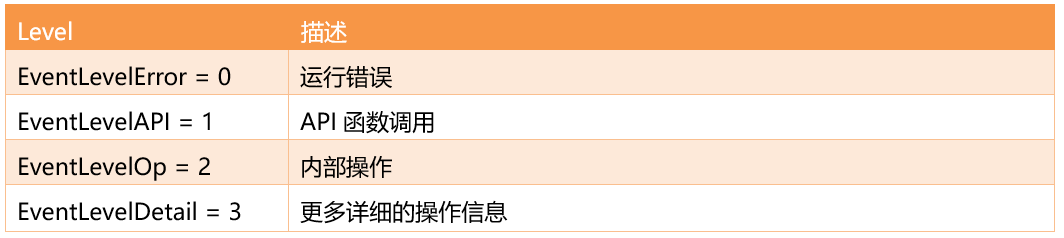
Component number指定事件消息所属的软件组件,也可用于过滤: 
看了下Event Recorder的源码,每条消息大体是一样的:
typedef struct {
uint32_t ts; // Timestamp (32-bit, Toggle bit instead of MSB)
uint32_t val1; // Value 1 (32-bit, Toggle bit instead of MSB)
uint32_t val2; // Value 2 (32-bit, Toggle bit instead of MSB)
uint32_t info; // Record Information
// [ 7.. 0]: Message ID (8-bit)
// [15.. 8]: Component ID (8-bit)
// [18..16]: Data Length (1..8) / Event Context
// [19]: IRQ Flag
// [23..20]: Sequence Number
// [24]: First Record
// [25]: Last Record
// [26]: Locked Record
// [27]: Valid Record
// [28]: Timestamp MSB
// [29]: Value 1 MSB
// [30]: Value 2 MSB
// [31]: Toggle bit
} EventRecord_t;
其中参数成员info最重要,也就是前面说的32位ID,这里的说明与前面的说明稍有不同。这里是经过处理后,实际存储到Event Recorder缓冲里面的数据。
对于Event Recorder,大家了解了这些知识点基本就够用了。
Event Recorder工程的创建比较简单,这里分步为大家做个介绍。
第1步:准备好一个使用MDK5.25或以上版本创建的工程模板。
第2步:安装ARM_Compiler V1.4.0或以上版本(如果有最新版,直接安装最新的),详情见帖子:
http://www.armbbs.cn/forum.php?mod=viewthread&tid=87175 。
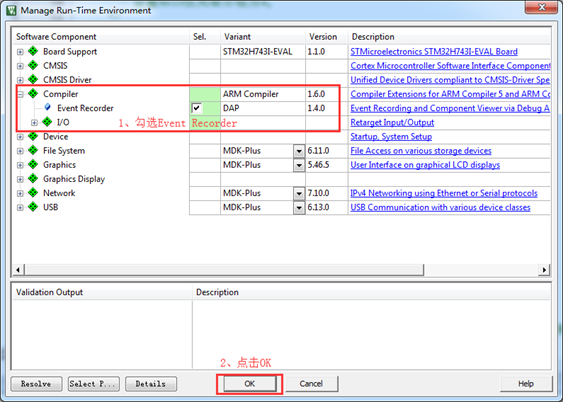
第3步:打开MDK5.25或以上版本创建的RTE环境。
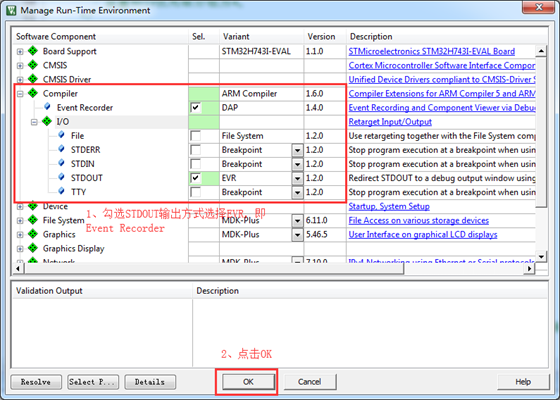
第4步:通过RTE环境,为工程添加Event Recorder功能。
第5步:为了实现printf重定向,我们需要将STDOUT的输出方式改为Event Recorder,即选项里面的EVR。
第6步:打开通过RTE环境为工程添加的文件EventRecorderConf.h,配置如下:
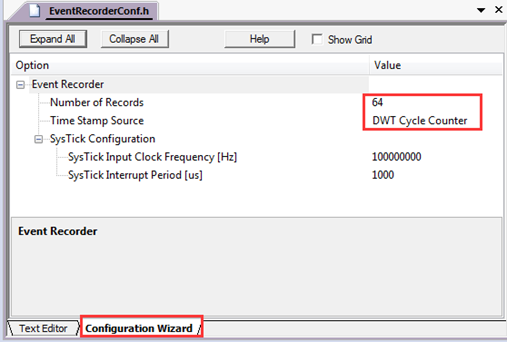
这里主要设置方框里面的两个参数。
Number of Records:表示Event Recorder缓冲可以记录的消息条数。
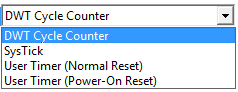
Time Stamp Source:表示时间戳来源,有如下四种可以选择,我们这里使用DWT时钟周期计数器。
由于选择的是DWT,因此EventRecorderCong.h文件中的Systick Configuration配置就不用管了。
==========================
通过上面的6步就完成了Event Recorder功能的添加,效果如下:
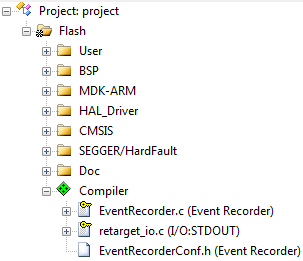
添加完成后,还有非常重要的两点要特别注意:
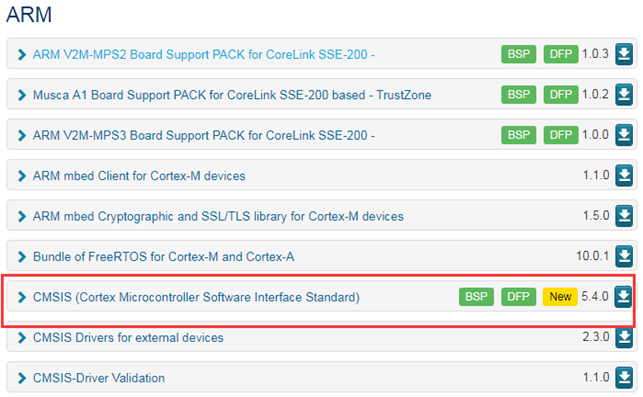
第1点:一定要使用当前最新的CMSIS软件包,当前是V5.4.0(随着时间的推移,如果升级了新版本,直接使用新版即可)。大家可以从这里下载:
http://www.keil.com/dd2/pack/ 。
下载并导入到MDK后,需要大家更新自己现有工程CMSIS文件里面的头文件,可以直接将CMSIS文件夹中Include文件里面的所有文件全部删掉,替换为MDK安装目录如下路径里面的所有头文件:
ARM\PACK\ARM\CMSIS\5.4.0\CMSIS\Include。保证头文件都是最新的5.4.0版本。
第2点:由于使能了printf重定向,大家的工程里面一定不要再做重定向了,比如fpuc,fgetc。另外当前选择了微库MicroLib:
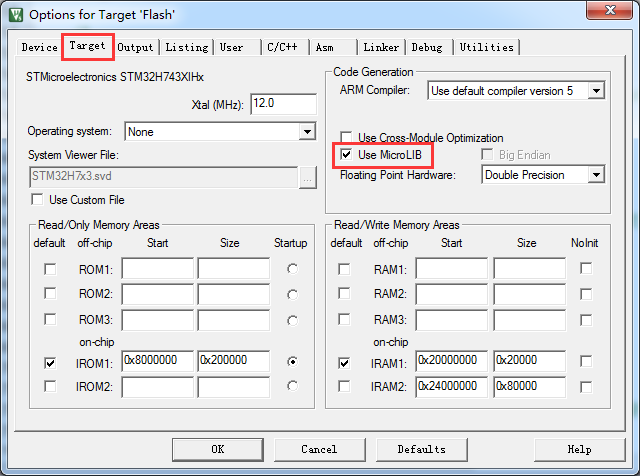
注意这两点后,就可以使用Event Recorder的功能了。
Event Recorder的使用也比较省事,这里也分步为大家进行说明:
第1步:初始化,仅需添加如下两行代码即可。
/* 初始化EventRecorder并开启 */
EventRecorderInitialize(EventRecordAll, 1U);
EventRecorderStart();
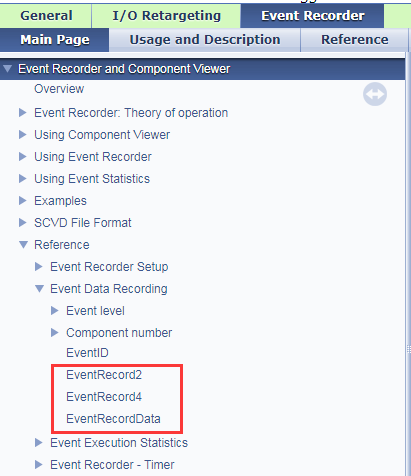
第2步:调用Event Recorder的API就可以使用了,主要有以下三个API:
EventRecord2:可以发送两个32位数据。
EventRecord4:可以发送四个32位数据。
EventRecordData:可以发送字符串。
显然这三个函数没有printf使用方便,所以对于这三个函数,大家做个简单的了解即可。教程配套例子里面有调用到这三个函数,可以操作熟悉下。这三个API的说明是在对应的help文档中,即MDK安装目录路径:/ARM/PACK/Keil/ARM_Compiler/1.6.0/Doc/General/html/index.html。
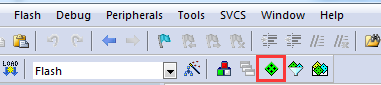
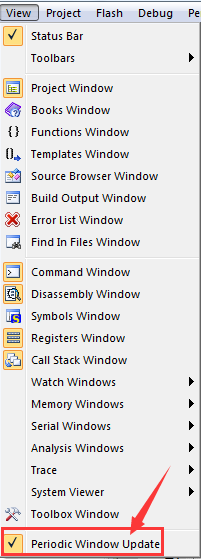
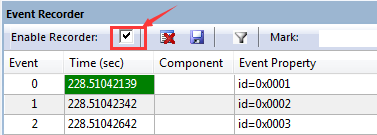
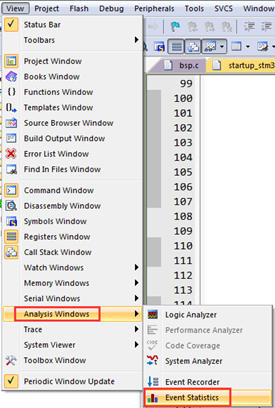
第3步:进入调试状态,选上周期更新:
点击全速运行:
然后将Event Recorder调试组件展示出来:
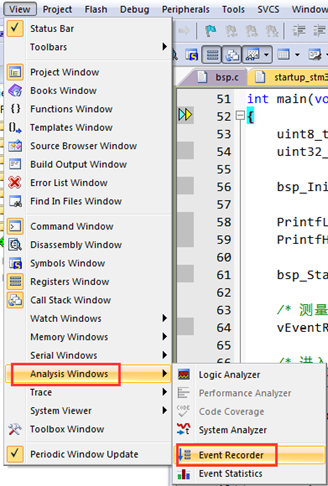
效果如下:
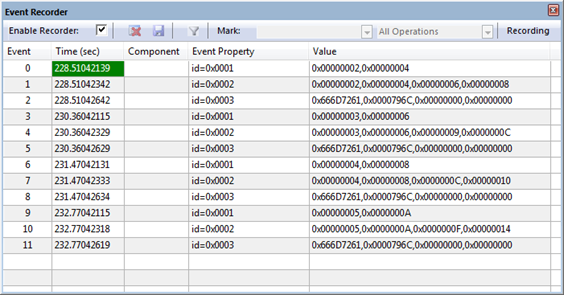
另外,这里有个知识点需要大家了解下,如果程序里面也调用了Event Statistics时间测量函数,那么也会在这个界面里面展示消息的,如何才能仅展示大家想看的功能呢?这就需要用到Event Recorder支持的筛选功能。使用这个功能需要大家先暂停全速运行,然后点击下面这个选项:
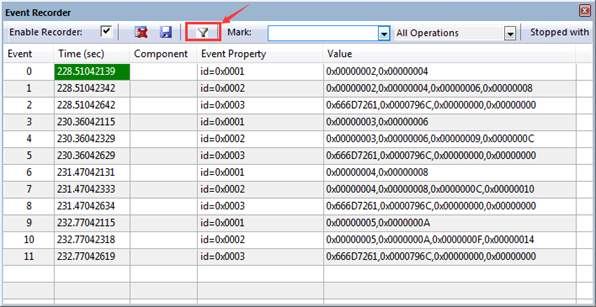
弹出的界面里面可以设置哪些选项显示,哪些选项不显示(勾上表示显示),我们这里取消Event Statistics的显示,设置完毕后记得点击OK按钮。
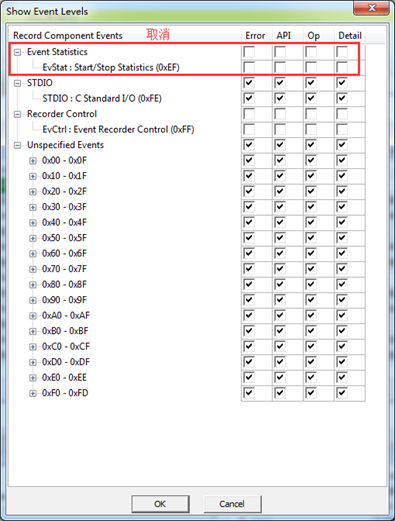
这就不展示Event Statistics的内容了。再次启动全速运行前,下面这个选项的对勾别忘了勾上。
实现printf输出需要用到MDK调试组件中的Debug(printf) Viewer,输出效果就跟大家使用串口调试软件一样,可以输出中文和英文。
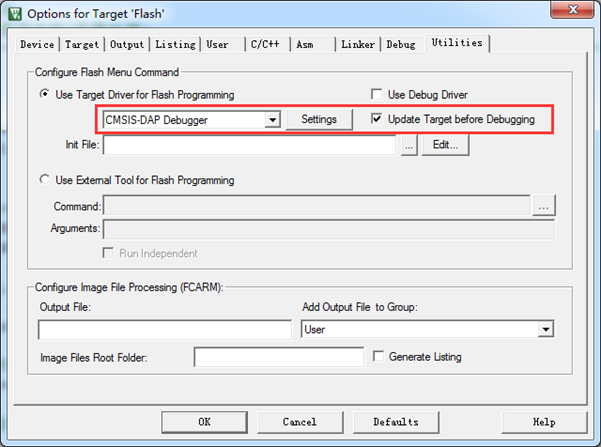
MDK的printf调试组件使用方法跟本章8.4小节中的说明一样,点击调试,选中周期运行,然后显示Debug(printf) Viewer调试组件:
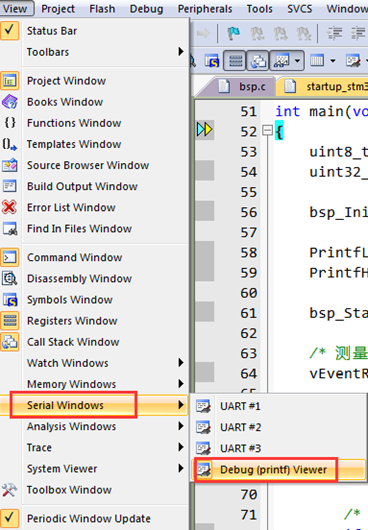
效果如下:
另外,还有一个知识点需要给大家做个补充,使用SWD接口的SWO引脚也是可以做串口打印的,并且也是通过这个调试组件Debug(printf) Viewer进行输出。只是这种方式的性能没有Event Viewer强,而且要多占用一个SWO引脚。
关于SWO输出方式可以看此贴:http://www.armbbs.cn/forum.php?mod=viewthread&tid=526 。
时间测量功能简单易用,仅需一个起始函数,一个停止函数即可。当前支持4组,每组支持16路测量,也就是可以同时测量64路。
时间测量的API函数支持多任务和中断里面随意调用。
1、 测量起始函数:EventStartG (slot) 或者EventStartGv (slot, val1, val2)
函数中的字母G是表示分组A,B,C,D,即实际调用函数为EventStartA,EventStartB,EventStartC和EventStartD。
函数的第一个形参slot的范围是0-15,也就是每个分组可以测试16路。
函数后面的两个形象val1和val2是32位变量,用户可以用这两个形参来传递变量数值给Event Statistics调试组件里面,方便图形化展示。简单的说,这两个变量仅仅起到一个传递变量数值的作用。
2、 测量停止函数:EventStopG (slot) 或者 EventStopGv (slot, val1, val2)
函数中的字母G是表示分组A,B,C,D,即实际调用函数为EventStopA,EventStopB,EventStopC和EventStopD。
函数的第一个形参slot的范围是0-15,也就是每个分组可以测试16路。
函数后面的两个形象val1和val2是32位变量,用户可以用这两个形参来传递变量数值给Event Statistics调试组件里面,方便图形化展示。简单的说,这两个变量仅仅起到一个传递变量数值的作用。
这里也分步为大家说明Event Statistics时间测量功能的使用方法。
第1步:初始化,仅需添加如下两行代码即可。
/* 初始化EventRecorder并开启 */
EventRecorderInitialize(EventRecordAll, 1U);
EventRecorderStart();第2步:在要测量的代码前后加上起始和结束时间。
EventStartA(0);
//测量的代码部分
EventStopA(0);
这里是用分组A的测量通道0。
第3步:跟本章8.4小节讲解的一样,点击调试,选择周期更新选项,然后全速运行。
第4步:全速运行后,显示Event Statistics调试组件。
比如我这里简单的测试了一个5ms的延迟函数,效果如下(测量时间是动态更新的):
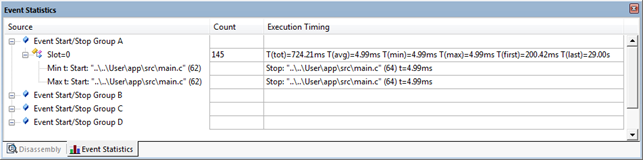
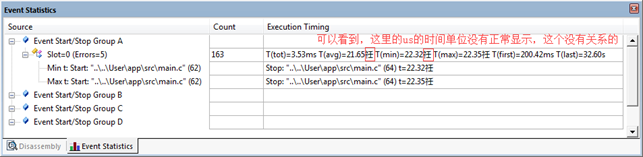
另外要注意一点,微秒的时间单位us可能无法正常显示,这个是没有关系的:
当前仅KEIL自家的ULINKplus支持功耗测量功能,这款下载器不便宜,一套5000多,大家有个了解即可,我们这里就不做讲解了。
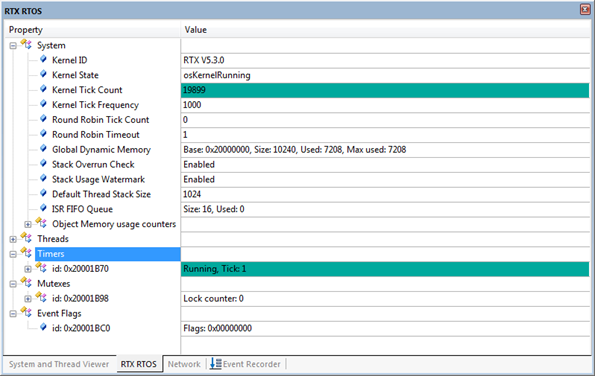
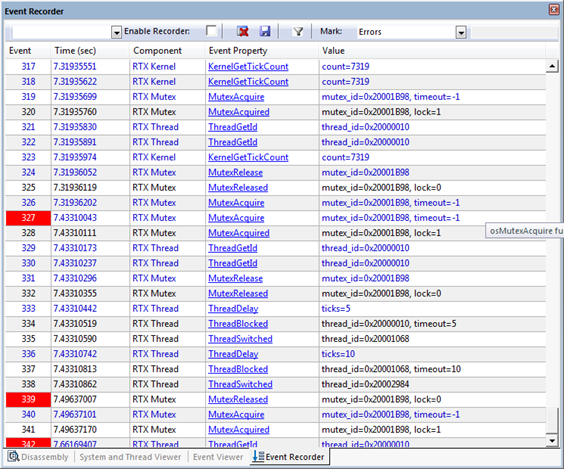
后面做RTX5及其所有中间件的教程时会为大家做讲解,这里让大家看下效果:
RTX5组件和使用Event Recoder的效果:
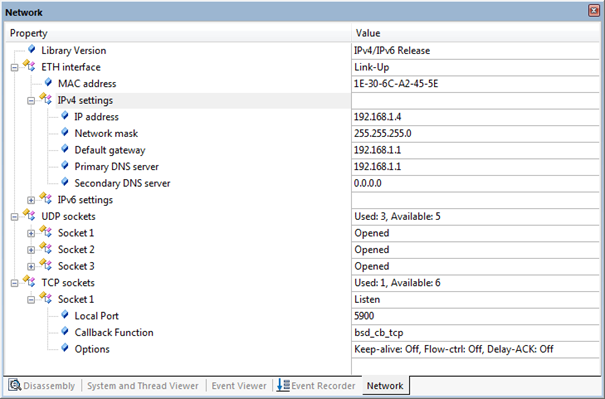
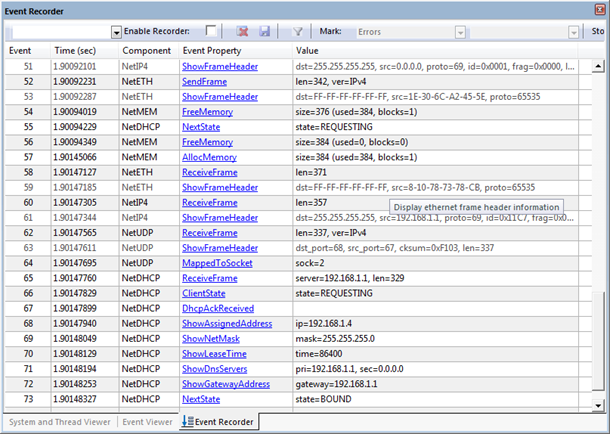
网络调试组件效果展示:
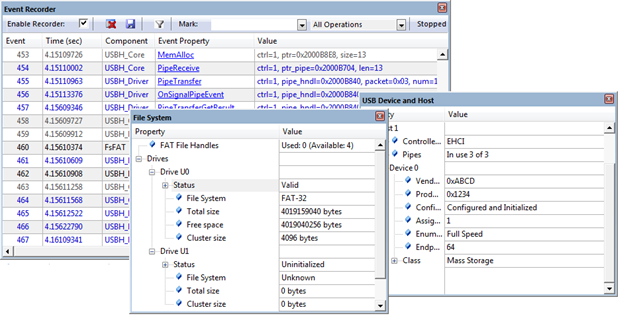
文件系统和USB协议栈的效果展示:
为了帮助大家更好的使用JLINK,这里将JLINK配置中关键的几个地方做个说明。
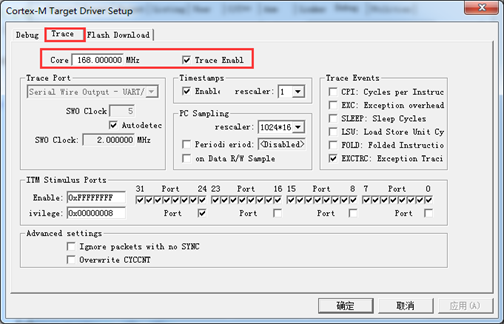
下面这个地方最重要,一定要正确设置当前系统工作的主频,如果不正确,会导致Event Statistics的时间统计不正确(对于H7,Core部分要填400MHz)。
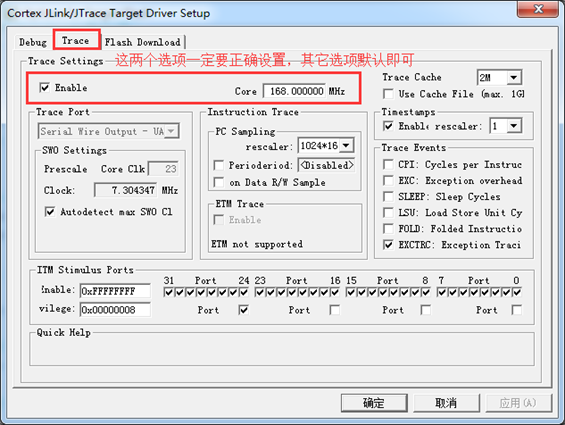
注:如果大家调试状态弹出SWD配置时钟超出范围的问题,可以考虑将上面截图中的Enable选项的对勾取消掉即可,但内核时钟一定要修改为芯片的主频。
另外,进入调试状态后,右下角的时间是否正常更新都没有关系:

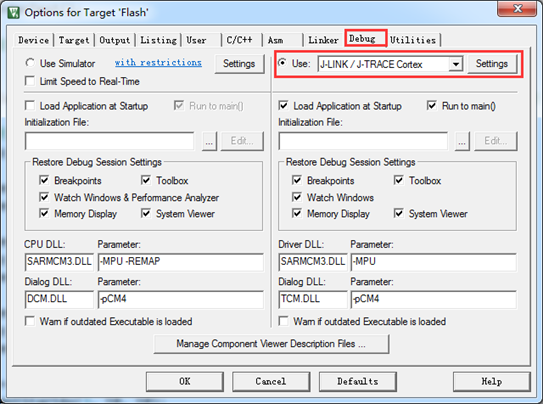
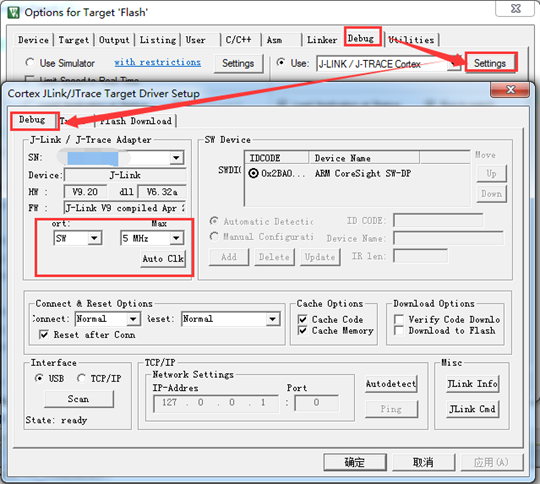
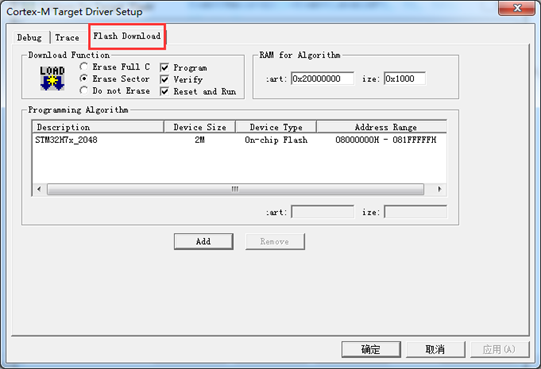
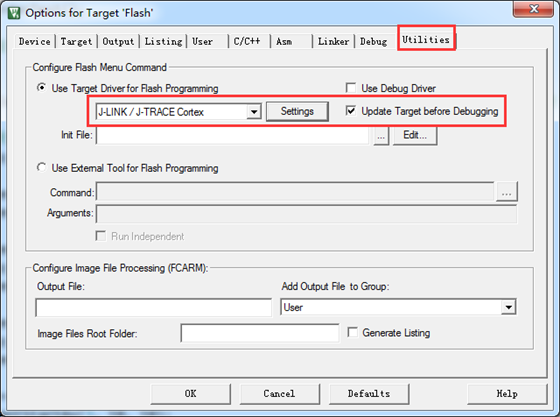
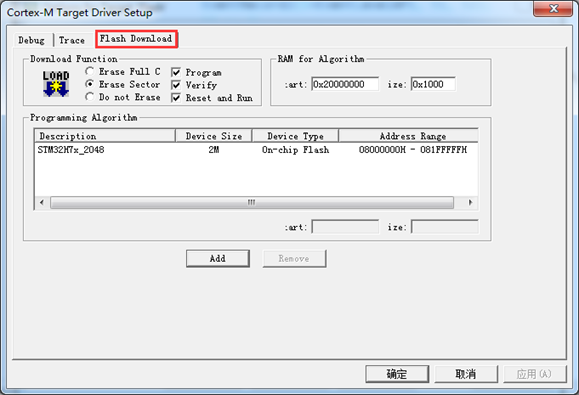
其它选项配置如下(只要大家的工程能够正常调试,配置就是没问题的):
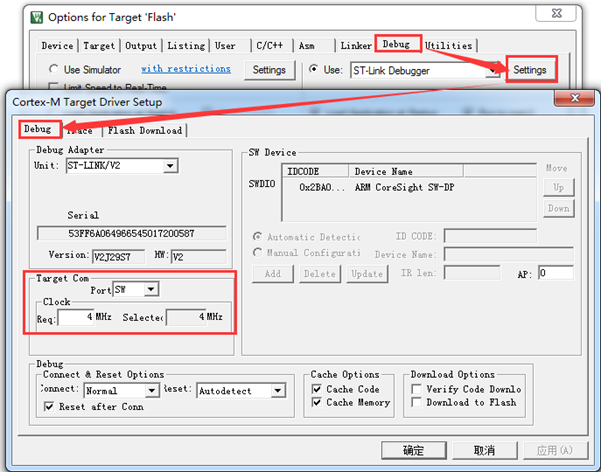
为了帮助大家更好的使用STLINK,这里将STLINK配置中关键的几个地方做个说明。
下面这个地方最重要,一定要正确设置当前系统工作的主频,如果不正确,会导致Event Statistics的时间统计是不正确的(对于H7,Core部分要填400MHz)。
另外注意,进入调试状态后,右下角的时间是否正常更新都没有关系:

其它选项配置如下(只要大家的工程能够正常调试,配置就是没问题的):
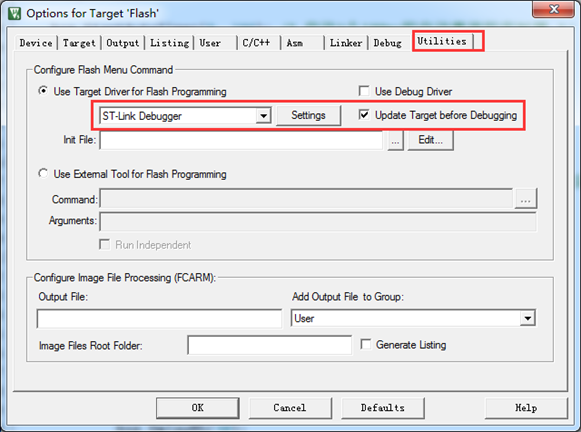
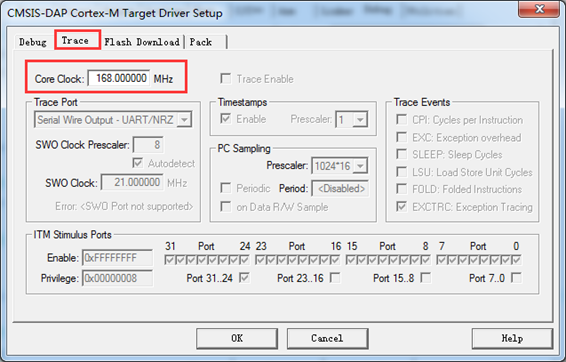
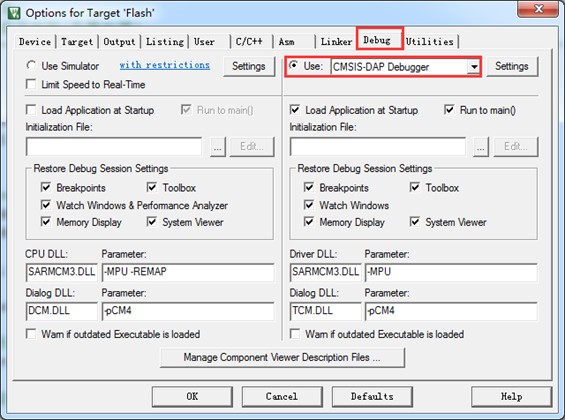
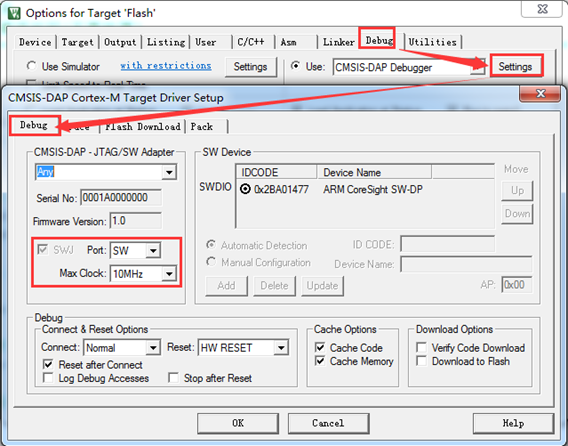
为了帮助大家更好的使用CMSIS-DAP,这里将CMSIS-DAP配置中关键的几个地方做个说明。
下面这个地方最重要,一定要正确设置当前系统工作的主频,如果不正确,会导致Event Statistics的时间统计不正确(对于H7,Core部分要填400MHz)。
另外注意,进入调试状态后,右下角的时间是否正常更新都没有关系:

其它选项配置如下(只要大家的工程能够正常调试,配置就是没问题的):
由于手头没有ULINK,这里就不做讲解了。如果大家需要相关配置,按照前面小节三款LINK的配置照葫芦画瓢搞一下即可,或者在MDK安装目录的路径ARM\Hlp下有对应的文档说明:
本章节教程配套了如下例程,仅MDK版本。
V7-008_终极调试组件EventRecoder的使用
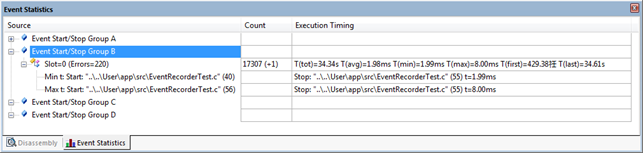
具体代码实现也比较简单,以V6开发板为例,定义一个TIM6的中断,中断频率是500Hz,通过Event Statistics测量中断的执行频率。代码如下:
#include "bsp.h"
#include "EventRecorder.h"
/* 定时器频率,500Hz */
#define timerINTERRUPT_FREQUENCY 500
/* 中断优先级 */
#define timerHIGHEST_PRIORITY 10
/*
*********************************************************************************************************
* 函 数 名: vEventRecorderTest
* 功能说明: 创建定时器
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
void vEventRecorderTest(void)
{
bsp_SetTIMforInt(TIM6, timerINTERRUPT_FREQUENCY, timerHIGHEST_PRIORITY, 0);
EventStartB(0);
}
/*
*********************************************************************************************************
* 函 数 名: TIM6_DAC_IRQHandler
* 功能说明: TIM6中断服务程序。
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
void TIM6_DAC_IRQHandler( void )
{
if((TIM6->SR & TIM_FLAG_UPDATE) != RESET)
{
EventStopB(0);
EventStartB(0);
/* 清除更新标志 */
TIM6->SR = ~ TIM_FLAG_UPDATE;
}
}
效果如下,测量的平均频率是1.98ms,与我们设计的500Hz基本符合:
应用程序的设计如下:
#include "bsp.h" /* 底层硬件驱动 */
#include "EventRecorder.h"
/*
*********************************************************************************************************
* 函数和变量
*********************************************************************************************************
*/
extern void vEventRecorderTest(void);
uint8_t s_ucBuf[10] = "armfly";
/*
*********************************************************************************************************
* 函 数 名: main
* 功能说明: c程序入口
* 形 参:无
* 返 回 值: 错误代码(无需处理)
*********************************************************************************************************
*/
int main(void)
{
uint8_t ucKeyCode; /* 按键代码 */
uint32_t t0 = 0, t1 = 0, t2 = 0, t3 = 0, t4 = 0;
/* 初始化EventRecorder并开启 */
EventRecorderInitialize(EventRecordAll, 1U);
EventRecorderStart();
bsp_Init(); /* 硬件初始化 */
bsp_StartAutoTimer(0, 200); /* 启动1个200ms的自动重装的定时器 */
/* 测量中断周期 */
vEventRecorderTest();
/* 进入主程序循环体 */
while (1)
{
bsp_Idle(); /* 这个函数在bsp.c文件。用户可以修改这个函数实现CPU休眠和喂狗 */
/* 判断定时器超时时间 */
if (bsp_CheckTimer(0))
{
EventStartA(0);
EventStopA(0);
EventStartA(1);
bsp_DelayMS(5);
EventStopA(1);
EventStartA(2);
bsp_DelayMS(30);
EventStopA(2);
t0++;
EventStartAv(3, t0, t0);
bsp_DelayMS(30);
EventStopAv(3, t0, t0);
}
/* 按键滤波和检测由后台systick中断服务程序实现,我们只需要调用bsp_GetKey读取键值即可。 */
ucKeyCode = bsp_GetKey(); /* 读取键值, 无键按下时返回 KEY_NONE = 0 */
if (ucKeyCode != KEY_NONE)
{
switch (ucKeyCode)
{
case KEY_DOWN_K1: /* K1键按下 */
t1 += 1;
t2 += 2;
EventRecord2(1+EventLevelAPI, t1, t2);
t3 += 3;
t4 += 4;
EventRecord4(2+EventLevelOp, t1, t2, t3, t4);
EventRecordData(3+EventLevelOp, s_ucBuf, sizeof(s_ucBuf));
break;
case KEY_DOWN_K2: /* K2键按下 */
printf("K2按键按下\r\n");
break;
case KEY_DOWN_K3: /* K3键按下 */
printf("K3按键按下\r\n");
break;
default:
/* 其它的键值不处理 */
break;
}
}
}
}
应用程序里面主要实现了三个功能:
1、利用测量分组A实现4路时间的测量(第1路什么也没有测量,可以用来表示这两个函数本身执行占用的时间)。每100ms测量一次时间,效果如下:
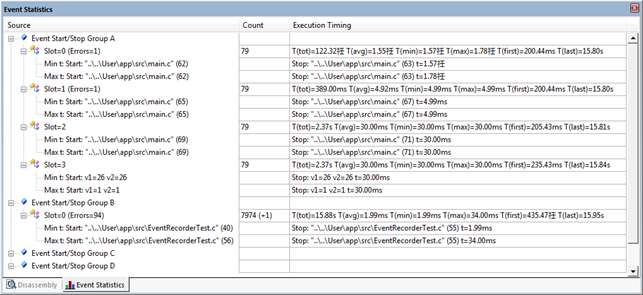
2、利用函数EventRecord2,EventRecord4和EventRecordData发送消息事件。按下按键K1进行更新,效果如下:
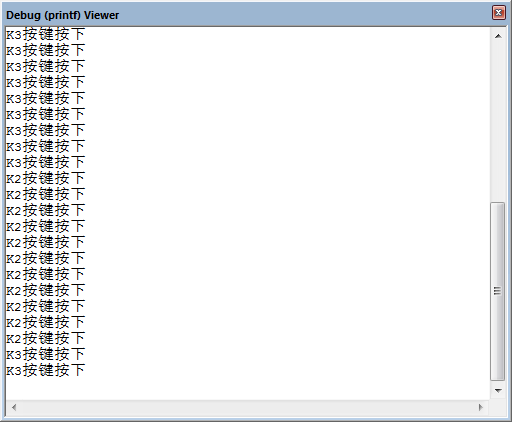
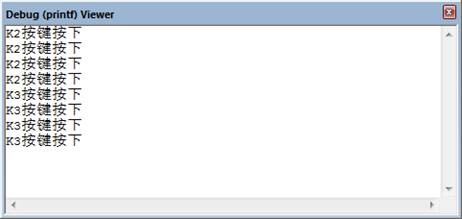
3、基于Event Recorder的printf重定向。按下按键K2或者K3会打印消息,效果如下:
Event Recoder还是非常实用的,建议大家多使用几次,熟练掌握。基本用上几次就上瘾,离不开了,的确是工程调试的利器。
原文地址:https://www.cnblogs.com/armfly/p/10757582.html
‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧ END ‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧ 关注我的微信公众号,回复“加群”按规则加入技术交流群。
点击“阅读原文”查看更多分享,欢迎点分享、收藏、点赞、在看。
