
为什么说 UWB 最适合室内定位跟踪?
超精准,提供厘米级精度,比 BLE 和 Wi-Fi 精确 100 倍
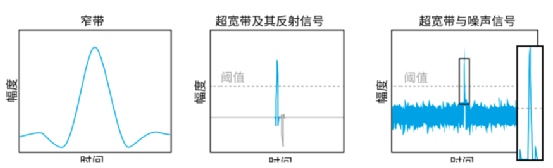
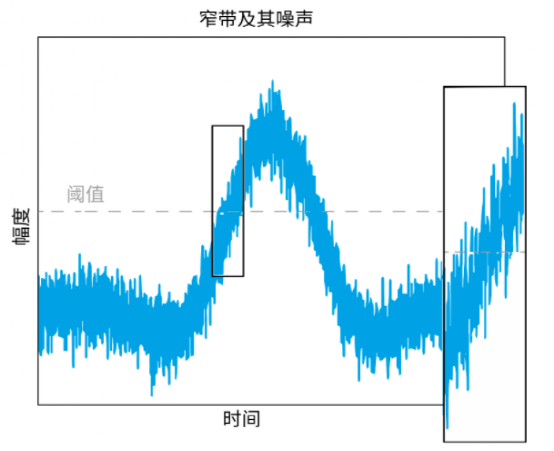
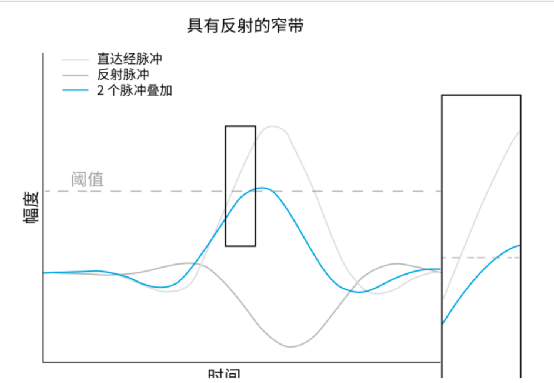
超可靠,在存在多径反射的情况下能够保持信号完整性
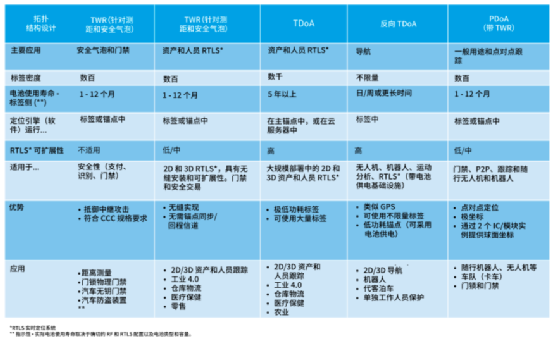
UWB 拓扑结构比较和选择
最佳拓扑结构主要由应用决定。这也就是说,设计工程师首先要将应用和拓扑结构匹配。可供选择的方法有:
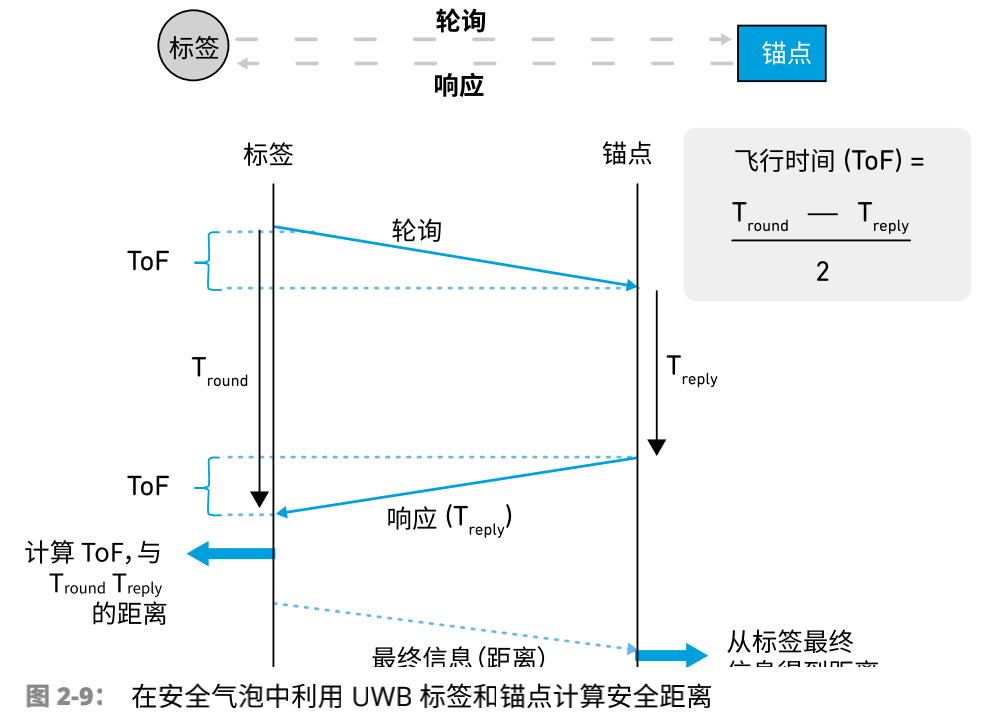
双向测距 (TWR):如图 2-9 所示,TWR 方法可通过测定 UWB 射频信号的 ToF,然后将该时间乘以光速来计算标签与锚点之间的距离。汽车无钥门禁系统就是使用 TWR 方法的一个应用示例 TWR 可生成一个安全空间,类似于一个安全气泡,同时确保在应用的时候,这个气泡保持高精度的安全控制。
如果您在两个设备之间实施 TWR 方案,则可以获得设备之间的距离信息。在 TWR 方案的基础上,您还可以在移动标签和固定锚点之间实现 2D 甚至 3D 位置测量;称为“三边测量法”。
采用 TWR 方法,可交换三条消息。标签通过发送一条含已知锚点地址的轮询消息启动 TWR。锚点记录轮询接收时间,并回复响应消息。在收到响应消息后,标签记录时间并编写最后一条消息。锚点可利用最后一条消息中的信息确定 UWB 信号的 ToF。
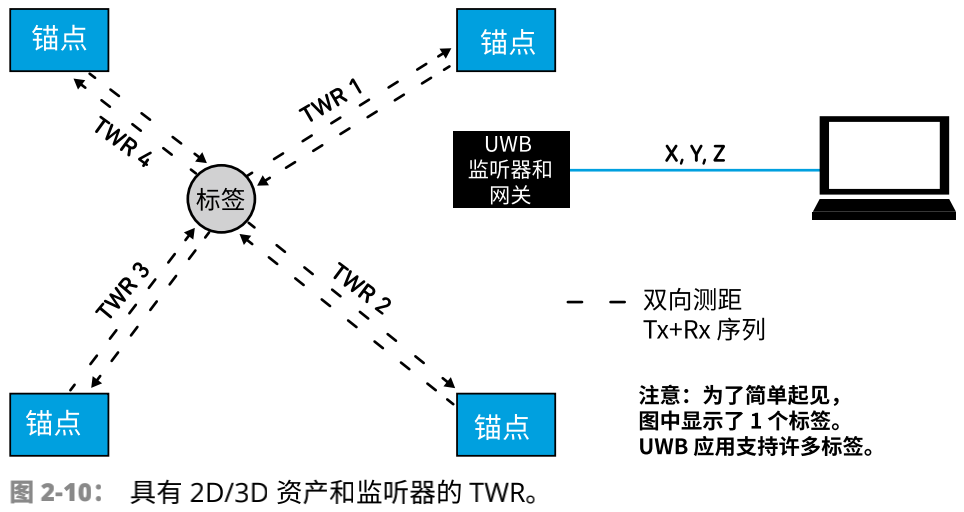
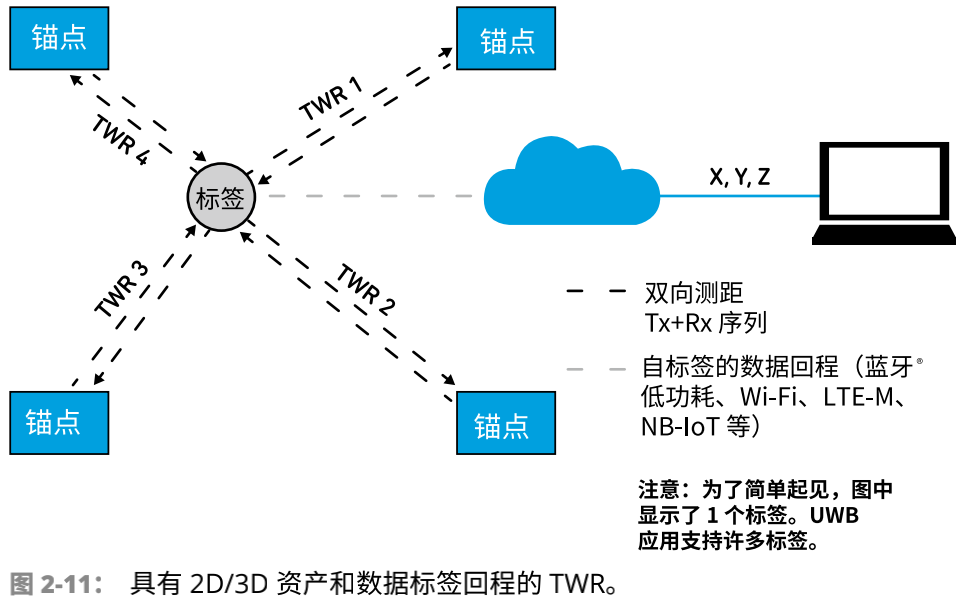
TWR 方法也可用于图 2-10 和图 2-11 所示的 2D/3D 资产场景。图 2-10 显示使用监听器的双向测距,而图 2-11 显示使用数据标签回程的 TWR。如图 2-11 所示,数据回传可以使用多种方法(如 Wi-Fi、NB-IoT、LTE-M 等)实现,通过这些方法将数据传输至云。
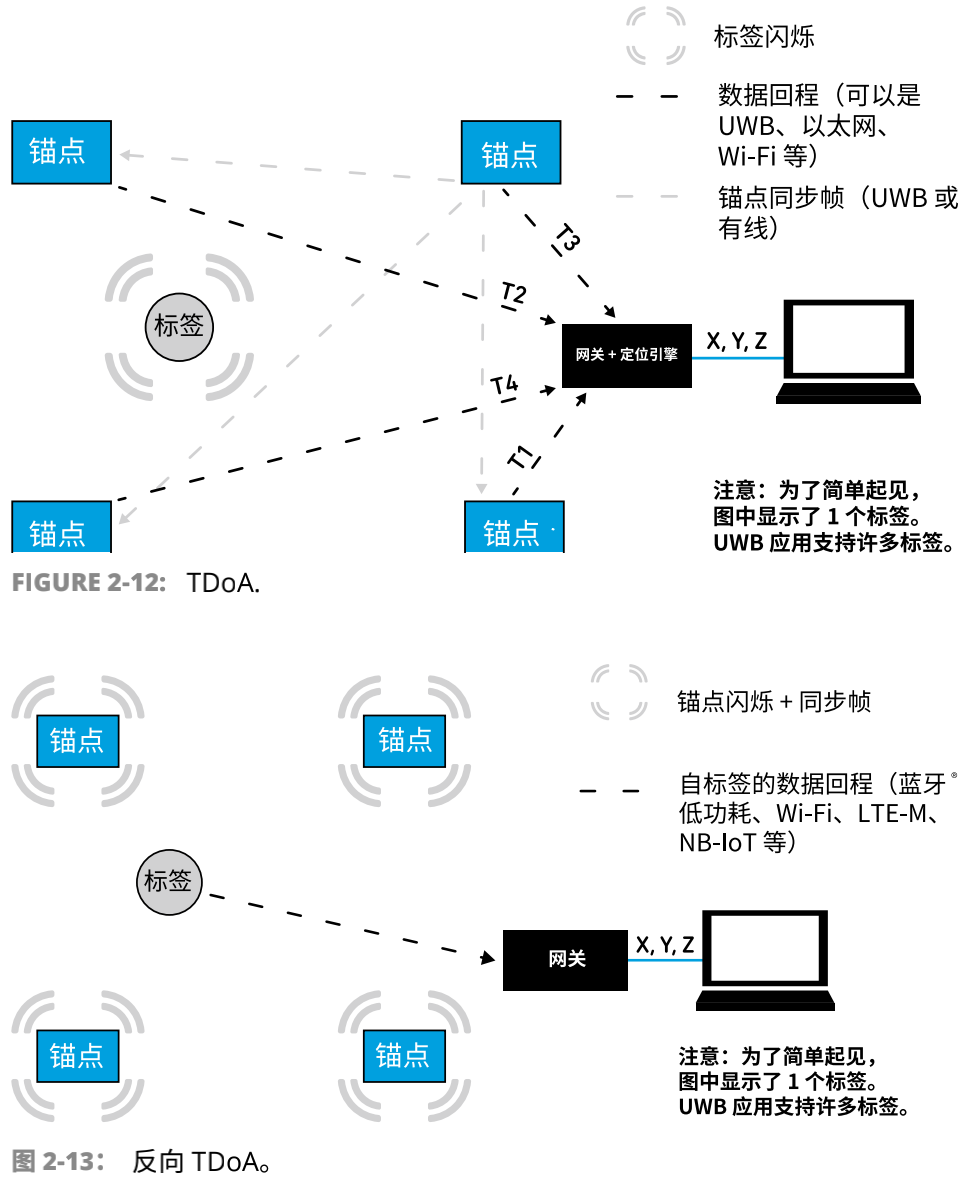
到达时间差 (TDoA) 和反向 TDoA:TDoA 和反向 TDoA 方法类似于 GPS。在已知的固定场所部署了多个参考点,称为“锚点”,且这些锚点在时间方面实现了紧密同步。如果为 TDoA,移动设备将闪烁(也就是定期发送信息),当锚点接收到信标信号时,将基于共同的同步时基标记时间戳。然后,多个锚点的时间戳将转发至中央定位引擎,中央定位引擎将根据每个锚点的信标信号 TDoA 运行多点定位算法。最后将得到移动设备的 2D 或 3D 位置,如图 2-12 所示。反向 TDoA 更像 GPS。在该系统中,锚点发送同步信标(具有固定/已知偏移,以避免发生碰撞),移动设备利用 TDoA 和多点定位算法来计算其位置,如图 2-13 所示。
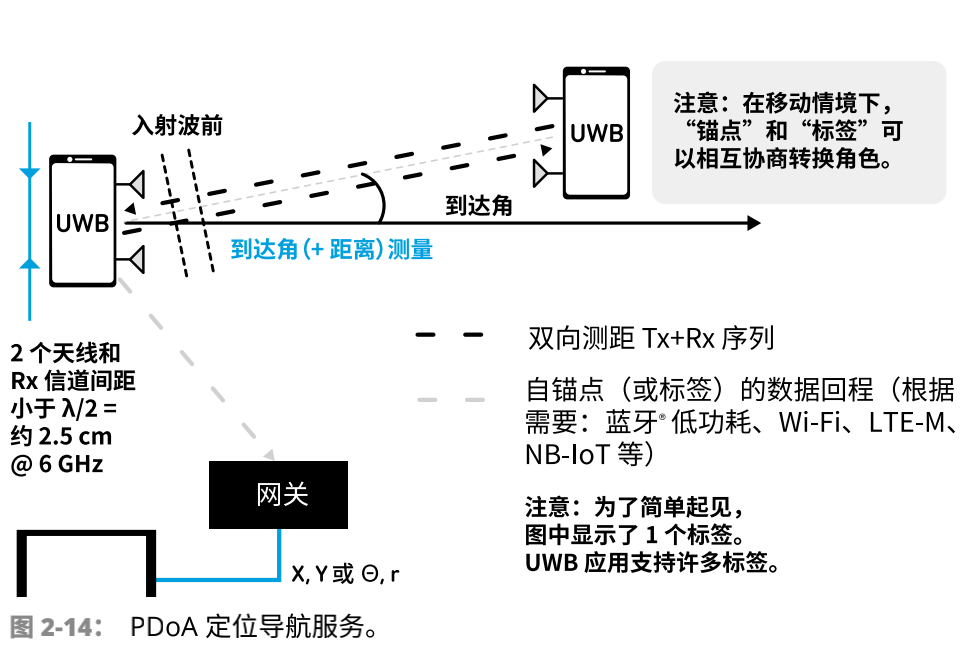
到达相位差 (PDoA):另一个 UWB 拓扑就是 PDoA。PDoA 可将两个设备之间的距离与两者之间的方位测量结合在一起,如图 2-14 所示。利用距离和方位的组合信息,可在没有任何其他基础设施的情况下计算出两个设备的相对位置。为此,其中一个设备必须配备至少 2 根天线,并且能够测量每根天线处到达信号载波的相位差。相位完全不受天线变形的影响,并且可实现优于 10°的测量精度,从而可以在不到 5°的情况下确定发射器的方位。
‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧ END ‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧ 关注我的微信公众号,回复“加群”按规则加入技术交流群。
点击“阅读原文”查看更多分享,欢迎点分享、收藏、点赞、在看。
