
来源 | 高端装备产业研究中心
智库 | 云脑智库(CloudBrain-TT)
云圈 | 进“云脑智库微信群”,请加微信:15881101905,备注您的研究方向
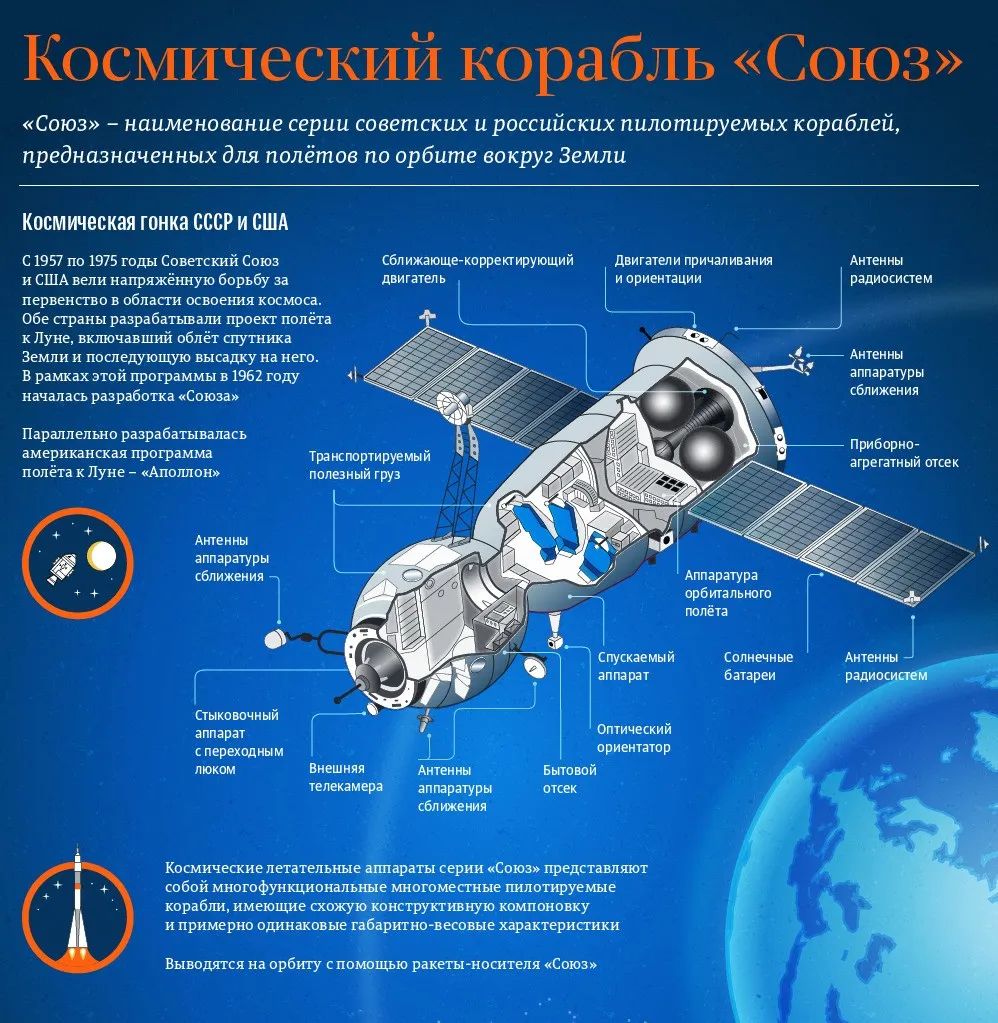
“联盟”号(俄语:Союз,英语:Soyuz)是苏联/俄罗斯第三代航天载人运输飞船家族的名称。1962年,为苏联登月计划苏联第一设计局(OKB-1)在科罗廖夫领导下开始研制该飞船的基本型号。“联盟”号航天飞船由科罗廖夫能源火箭航天集团(RSC Energia)设计和制造。“联盟”号航天飞船是俄罗斯一个标志性的工程。该飞船创建于20世纪60 年代,不断进行现代化改造,至今仍用于太空飞行。“联盟”号航天飞船作为苏联和俄罗斯载人航天探索计划的重要组成部分,苏联解体后由俄罗斯联邦航天局(现俄罗斯国家航天集团(Roscosmos))继续使用至今。在2011年美国航天飞机退役后到2020年5月30日载人龙飞船2号首飞前,乘坐“联盟”号飞船是各国航天员往返国际空间站的唯一途径。
“联盟”号飞船基本情况
每艘“联盟”号载人飞船的制造需要2.5~3年时间。“联盟”号飞船低廉的成本,极佳的可靠性和升级潜力让其在首飞50多年后仍然活跃在航天舞台上。从1966年至2021年10月,“联盟”号航天飞船已经执行了167次飞行任务(其中包括未成功和试验飞行等),最近一次发射活动于2021年10月5日进行,当日,俄罗斯联盟-2.1a型运载火箭从位于哈萨克斯坦的拜科努尔航天中心顺利发射,将“联盟MS-19”号载人飞船送往国际空间站。1957年~1975年,苏联和美国为在太空探索领域占据统治地位展开了激烈的竞赛。两个国家都制定了月球飞行计划,包括绕月飞行及登陆。在该框架下,苏联于1962年开始研制“联盟”号飞船,初始综合体项目代号为7K-9K-11K。美国同时开展“阿波罗”飞月计划。1965年,“联盟”号飞船项目研制工作重新定位,研发载人飞船,用于近地轨道飞行。开始研制代号为7K-OK的航天器。1966年11月28日,开始首次测试7K-OK飞船(Kosmos-133)无人发射。1967年4月23日,首次载人发射(“联盟1”号飞船)。1967年开始研制7K-S改型,用于与轨道飞船对接及向其运送航天员开展技术试验。1969年,开始长期轨道站建造工作及7KT-OK运输飞船研制,该飞船用于向其运输航天员。1971年6月6日,在7KT-OK飞船(“联盟11”号)飞行过程中,发生座舱密封失效故障,机上全部航天员遇难。在该悲剧之后,苏联决定停止该系列飞船运行并对其航天器安全系统进行改造。1971年,RSC Energia基于7KT-OK型开始7K-T改型研制,用于向“礼炮”轨道站及“金刚石”载人轨道站运输航天员。1972年,RSC Energia开始在美苏“阿波罗”-“联盟”试验飞行计划框架内研制7K-TM型航天飞船,为了确保与“阿波罗”对接,在“联盟”号飞船轨道舱上安装了偶合外围部件。1975年,RSC Energia在7K-S型基础上开始研制“联盟T”型飞船,用于将航天员运送到轨道站。升级后,生命支持系统可使飞船能容纳3名航天员。1980年,RSC Energia开始研制“联盟TM”型飞船,用于撤离“和平”轨道站和“暴风雪”飞船上的人员。该改型飞船安装新型交会对接系统、推进系统和机载设备。1993年9月2日,美俄签署协议,合作建立国际空间站及美国航天员国际空间站飞行计划。1996年,根据美国国家航空航天局(NASA)的需求,在“联盟TM”型基础之上,RSC Energia开始研制“联盟TMA”型航天飞船,其建造目的是扩大飞船的人体测量参数范围。2005年,RSC Energia开始研制“联盟TMA-M”型航天飞船。该飞船的特征是采用数字控制系统及现代化改装的机载系统。
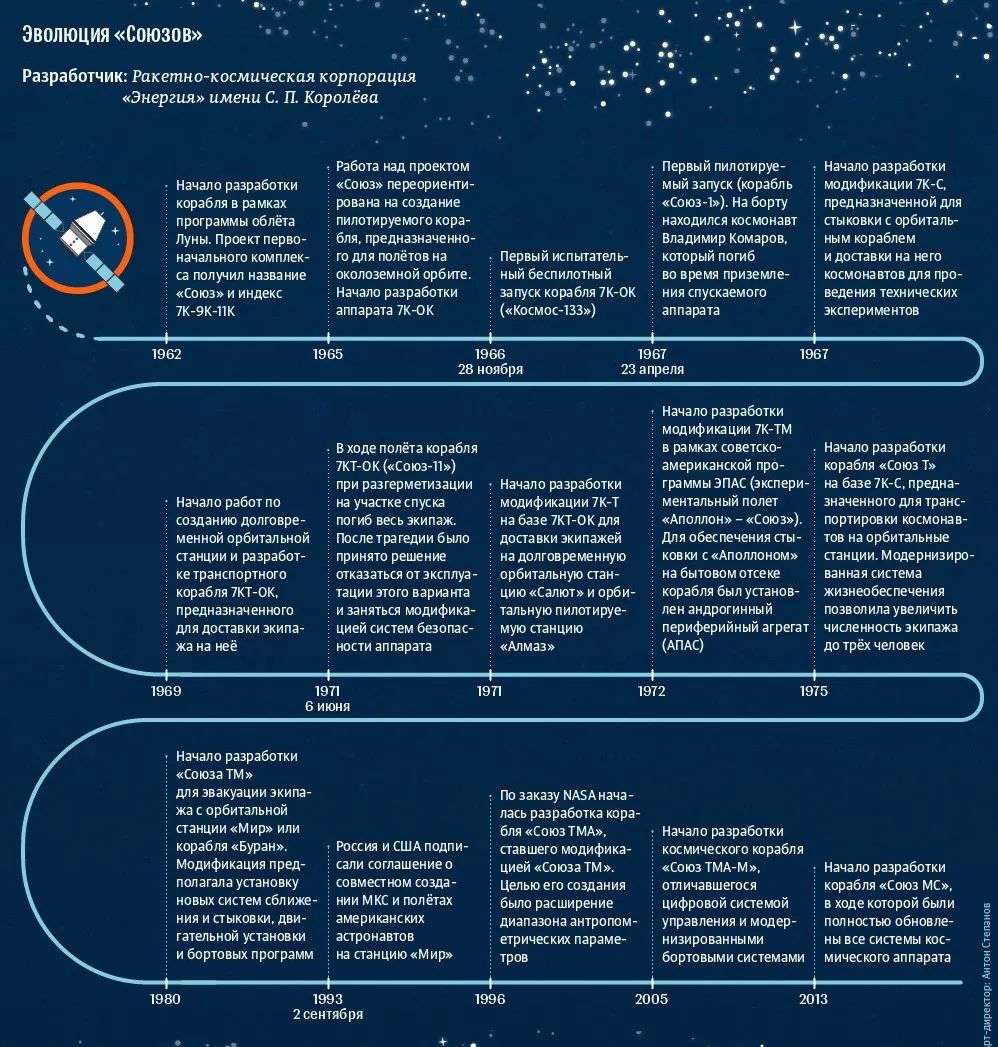
2013年,RSC Energia开始研制“联盟MS”号飞船,在其研制过程中更新了整个航天设备系统。苏联于1962年开始研制“联盟”号飞船,初始综合体项目代号为7K-9K-11K。该“联盟”号航天飞船由当时的谢尔盖·科罗廖夫设计局(即苏联第一设计局(OKB-1),现RSC Energia)研制。拟研究航天器在人造地球卫星(AES)轨道上交会对接的方法,以及航天器的结构和系统,以确保绕月飞行并返回地球。1965年,随着绕月飞行新计划的通过,当时处于设计阶段的“联盟”号项目被重新定位,创建载人轨道航天器,用于航天员轨道自主飞行,完成在地球轨道上机动和对接操作以及进行一些实验。此时的航天飞船为7K-OK。在航天器的研制过程中,特别注重为航天员在发射、飞行和从轨道下降过程中的工作和生活创造有利条件。在结构上,“联盟”号飞船由三个主要部分组成——轨道舱,这是航天员进行科学研究和休息的科学实验室;返回舱——是设计用于将机组人员送入轨道并返回地球的下降飞行器;服务舱,装有飞船主要系统的仪器和设备及推进系统。该航天飞船设计搭载三名航天员。没有提供飞行服来保护航天员免受生活区减压。1966年11月28日,7K-OK飞船进行了首次无人测试飞行,发射Kosmos-133卫星,该卫星被发射到人造地球卫星轨道,并绕地34圈。由于 1966 年 12 月发射时发生运载火箭事故,第二艘无人飞船没有进入轨道,第三艘无人飞船(Kosmos-140)于 1967 年 2 月进行了轨道飞行,在咸海着陆。在测试不足的情况下,正与美国进行登月竞赛的苏联当局在仓促中于1967年4月23日推进了第一次载人任务,代号为“联盟1”号。“联盟1”号是一次测试性发射,以惨剧收场:飞船发生了一系列故障,最后因为降落伞无法展开导致航天员弗拉基米尔·科马罗夫牺牲。灾难发生后,直到 1968 年 10 月,“联盟”号载人发射被暂停。在此期间,飞船继续以无人模式飞行,根据在地球和太空的测试结果,进行了多次重新检查和改进,完善了设计,着重提高了可靠性。测试证实了“联盟”号的高技术特性。这艘飞船第一次利用了它的空气动力学特性——它可以像潜水一样多次进入高层大气,在返回地球时减弱其速度。地面和飞行测试的积极结果使“联盟”号航天飞船进行载人发射成为可能。1968年10月26日,随着“联盟3”号的发射,“联盟”号飞船开始定期飞行。在飞行中,“联盟3”号靠近“联盟2”号无人飞船几十米的距离。1969年1月16日,“联盟4”号和“联盟5”号两艘载人飞船在轨道上对接,形成了第一个实验空间站,两名身着宇航服的航天员通过太空从一艘飞船转移到另一艘飞船。1969年10月,执行了3艘载人飞船的联合飞行任务,在地面控制综合体的操作下进行了其相互机动和科学技术试验,同时3艘飞船——“联盟6”号、“联盟7”号和“联盟8”号以及7名航天员被发射入轨。1970年6月,“联盟9”号飞船进行了第一次持续17.7天的长途飞行。“联盟”号飞船的飞行为在太空建造“礼炮”和“和平”轨道站提供了大量数据,并实现太空飞行员替换任务。1971年,飞船进行了现代化改造,变成了一艘将航天员运送到空间站的运输船,并一直使用到1981年(包括“联盟40”号),为“礼炮”轨道站长期运行提供保障以及保障“国际航天”(Interkosmos)计划的实施。
“联盟”号飞船型号发展
在运行期间,该飞船经历了两次改进。第一次与修改有关,在1971年6月“联盟11”号飞船的航天员牺牲后,出现了修改的需要,即“联盟7K-T”型。在返回舱(包括宇航服)减压的情况下,将一系列救援手段设备引入飞船系统的结构中。为了补偿巨额成本,航天员人数从三人减少到两人,并且太阳能电池板被排除在飞船供电系统之外(没有安装太阳能电池板)。“联盟”号飞船的第二次改装是在“联盟号-阿波罗”计划下的第一次国际实验飞行中进行的。第二次改进的“联盟”号(“联盟7K-TM”)配备了新的兼容交会对接装置、改进的生命支持系统装置、升级的运动控制设备、新的指挥无线电链路和无线电遥测、带彩色电视摄像机的电视系统和更新的太阳能电池。因这次改造升级,1975年7月的苏联“联盟19”号飞船与美国“阿波罗”飞船的联合飞行圆满完成。随后,“联盟T”运输飞船被制造,用以取代“联盟”号飞船。它以显著改进的系统(数字计算机(TsVM)、新的控制系统、联合推进系统)而著称。通过改造返回舱,“联盟T”的机组人员最多可以为三名穿着宇航服的航天员。改进后的运输船将苏联和国际机组人员运送到“礼炮6”和“礼炮7”轨道站。“联盟T”飞船于1979~1986年发射。1980年代,“联盟T”进行了现代化改造并命名为“联盟TM”(即联盟-运输现代化)。“联盟TM”飞船安装了新的交会对接系统“航向”(Kurs),改进了推进系统、无线电通信系统、发射逃生系统、降落伞系统、软着陆发动机、机载数字计算机等。新改型飞船在1986年5月21日以无人版发射到“和平”号空间站后开始运行。从1987年2月开始的飞船载人飞行不仅保证了“和平”轨道综合体的成功运行,也确保了国际空间站(ISS)运行的初始阶段。“联盟TM”飞船于1986~2002年发射。为了参与国际任务,“联盟”号创建了进一步改型。1995年根据NASA的需求,为扩大“联盟TM”机组人员的人体测量参数范围,科罗廖夫能源火箭航天集团开始开发“联盟”号进一步改型。因为只有俄罗斯的“联盟TM”飞船在技术上能够在国际空间站上承担救援飞船的功能,而“联盟TM”飞船无法容纳非常多的美国航天员。该进一步改型的航天飞船获得了“联盟TMA”的代号,其中字母“A”代表“人体测量修改”。在创建“联盟TMA”航天飞船时,开发并实施了独特的创新解决方案:其返回舱的结构修改使其能够容纳具有更大范围的人体测量参数(体重从50到95公斤,身高从150到190厘米)的航天员,以及在手动模式下改善对飞船的控制。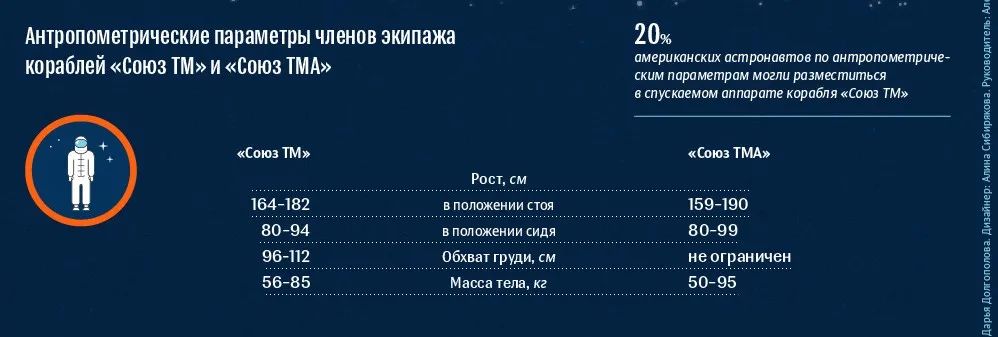
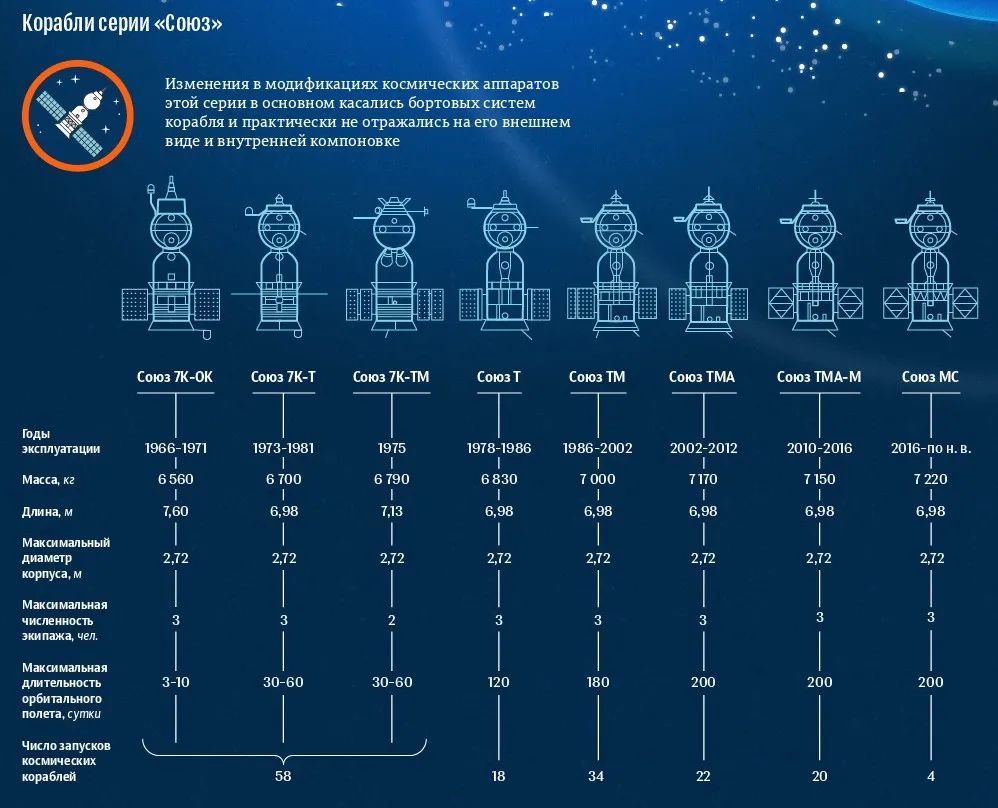
“联盟TM”及“联盟TMA”航天飞船航天员人体参数“联盟TMA”系列第一艘飞船于2002年10月30日发射,2003年5月4日,其返回舱成功着陆。在俄罗斯国内实践中,该型号是航天飞船首次以载人模式飞行,而无需在无人发射中对改装系统进行初步测试。之后,“联盟TMA”飞船开始进行运输作业,将机组人员运送到国际空间站并返回地球。“联盟TMA”的发射时间表维持在2002~2012年。在“联盟TMA”运行的同时,一种飞船新改进型“联盟TMA-M”也正在被开发。新飞船更换了运动控制系统和机载测量系统的机载设备;飞船在机载系统控制方面的功能以及采用多路交换通道与国际空间站俄罗斯段的机载计算机系统进行更深层次集成的功能得到了扩展。此外,该飞船的整个系统也受到了一些微小变化的影响。这种改型的航天飞船于2010年开始飞行,一直持续到2016年年中。2016年7月,作为“联盟TMA”深度现代化的结果,在RSC Energia创建的一系列新的“联盟MS”航天飞船开始飞行。在“联盟MS”上,“Kvant-V”机载无线电技术指挥系统被带有附加遥测通道的统一指挥遥测系统所取代。新的指挥无线电链路通过“Luch-5”中继卫星接收信号。该飞船配备了“Kurs-NA”现代机载无线电技术交会对接系统。“联盟MS”没有使用“Klest”模拟电视系统,而是使用数字电视系统,该系统允许通过机载无线电链路在飞船和空间站之间进行通信。飞船上的机载设备还包括一个新的数字备用回路控制单元、一个现代化的角速度传感器单元和一个LED大灯。由于使用了新的地面和机载无线电工程系统,可以使用现代信息传输协议,从而提高了飞船控制系统的稳定性。在结构上,“联盟MS”与“联盟”系列的第一艘飞船一样,由三个主要舱段组成。该飞船全长6.98米,船体直径2.72米。该船的质量为7220公斤,采用三座设计。目前,RSC Energia专家正在开发新一代载人运输飞船,其研制将采用“联盟MS”中包含的大部分技术解决方案。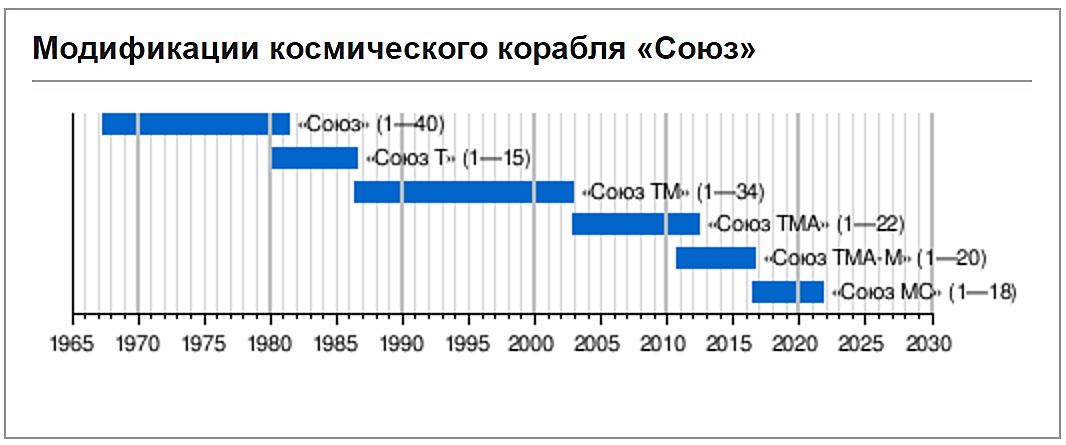
如果从外表看,“联盟号”航天飞船似乎由三个独立的模块串联在一起组成。实际上,它的设计有五个部分,其中三个是密封的,两个是非密封的。轨道舱,也被称为居住舱(俄语:Бытовой отсек,БО),最初是由镁基合金制成,后来开始由铝合金制成。这是一个密封的可居住舱段,在文件中称为轨道舱或轨道居住舱。它的长度为2.6米,直径为2.2米,质量约为1300千克,密封容积为6.5立方米,可居住内部容积约为4立方米。里面和外面有设备和仪器,是航天飞船各种系统的一部分,包括三名机组人员的生命支持系统(LSS)、交会对接设备、各种子系统的控制面板、飞行所需的测量装置、电视设备和航天员医药卫生保障用品。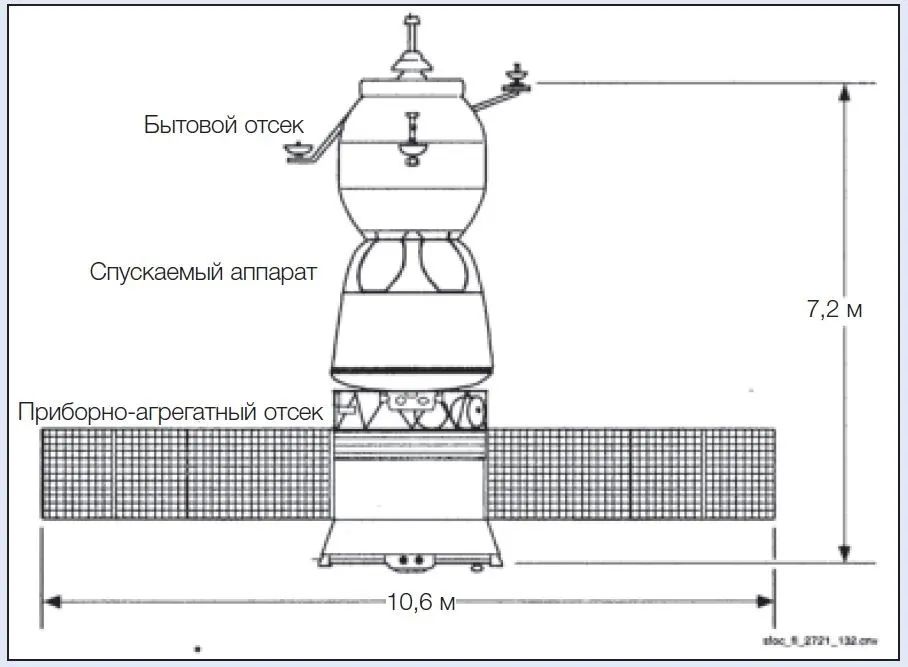
目前的“联盟”号飞船是 1966 年 11 月以无人模式首次飞行的初始飞船两次重大进化飞跃的产物。现代化的第一次飞跃是在 1971 年,当这艘飞船适应为空间站提供运输服务时,为航天员们配备了防护服,并专注于提高所有系统的可靠性。第二次,真正的重大飞跃,发生在 1978 年,研制出带有数字计算机和组合燃料供应系统以及重新设计的驾驶舱内部的新型“联盟T”飞船。所有后续型号均基于此类飞船。在整个飞行过程中,轨道舱始终与飞船相连,并且仅在航天员返回地球之前立即分离。轨道舱的上部有一个节点系统,用于飞船与国际空间站的对接,其中包括一个内径为80厘米的舱门,航天员通过它进入空间站。在轨道舱的另一部分有一个内径为60厘米的舱门,飞船上的航天员在飞船发射入轨前,通过该舱口进入返回舱。在轨道舱的上部还有一个观测窗,在自动交会系统出现故障时,航天员可以使用它来执行手动对接操作。在下部外侧,有一个特殊电缆桅杆的连接器,用于连接各舱的管道和电路。在轨道舱的外部,安装了“航向”(Kurs)雷达系统天线,借助它进行自动交会对接,这已成为“联盟”号飞船的一个专长。在飞行过程中,舱与舱之间通过爆炸螺栓和弹簧推动器相互连接以进行分离。轨道器连接返回舱(俄语:спускаемый аппарат,СА)——一个密封舱,航天员在发射、对接、脱离和着陆操作期间都在其中。
总体而言,“联盟”号结构由三个主要部分组成:顶部的轨道舱(1)、其下方的返回舱(2)和最底部的服务舱(3)。从上方看,所有密封的舱都覆盖有屏蔽真空绝缘材料。推进部分在下图中以白色突出显示。在其下方,还有一个用于将航天飞船连接到运载火箭的适配器。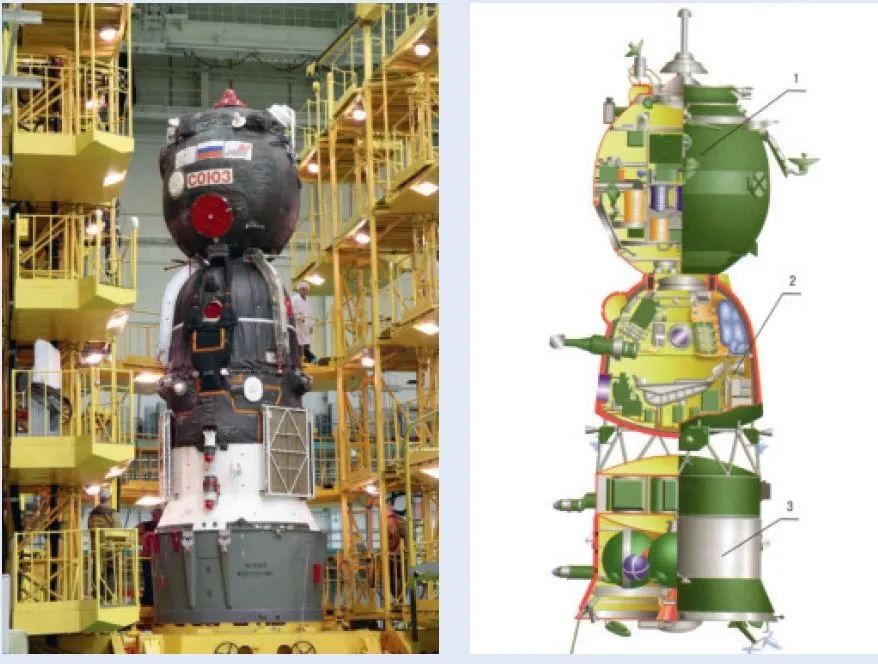
返回舱呈钟形,其密封容积为3.85立方米,可用内部容积为2.5立方米。它的高度为2.1米,直径为2.2米,重量为2900千克。在返回舱狭窄的内部安装了三把座椅,它们被放置在一个特殊的位置,航天员需双腿蜷缩座于配备显示器的控制面板前面。返回舱设计降落在坚硬的地表上,但在意外降落在水面上时可以保持漂浮状态。此外,在着陆后的恶劣天气条件下,它可以作为航天员的避难所,例如在冬季:从实践来看,有一些情况下,深雪和暴风雪使紧急救援队无法快速到达着陆区。该返回舱内部配备了用于监测飞行中飞船系统的控制装置和设备、在飞船剩余舱室分离后启动的最小生命支持系统,以及用于航天员着陆后生存的应急物资。此外,返回舱还拥有电视和通信系统、电池以及收集和传输遥测信息的系统。三把座椅采用减震设计,并在预期着陆时刻前不久在减震器上被稍微升高,以缓冲对人的冲击。在外部,返回舱表面涂覆隔热涂层,其略微凸出的底座是防热盾,在下降大气段脱落以打开固体燃料软着陆发动机的喷嘴,这样设计在于,使其在接触地面之前的最后几毫秒内被启动,并将返回舱减速到安全速度。作为返回舱一部分的特殊密封容器包含主降落伞和备用降落伞,而两个舷窗让航天员可以看到外面发生的事情。八台定向液体火箭发动机放置在返回舱外部。当返回舱返回大气层时,它们的有毒燃料过氧化氢在着陆前从其油箱中排出。返回舱的上部舱门直径为60厘米,供机组人员在发射前进入其座位,在飞行中进出返回舱,也用于在着陆后离开返回舱。返回舱在启动时位于其上的开放式桁架结构将其连接到服务舱(俄语:прибо́рно-агрега́тный отсе́к,ПАО)。该桁架包含用于分隔舱室的装置、一些姿态推进器、无线电天线和用于在发射前连接地面设备的电连接器。此外,它还包含氧化剂罐,用于向飞船提供可呼吸的空气。桁架是将密封的轨道舱和返回舱与其下方的服务舱连接起来的机构。服务舱高2.5米,上部直径2.2米,在此处服务舱与连接桁架连接;下部直径2.7米,连接至运载火箭上级适配器。鼓状服务舱的顶部密封并充满惰性气体。服务舱内部装有带有无线电设备的机架、用于记录和传输遥测的系统、电池和电源装置、热控制系统以及飞船运动和方向控制模块。此外,它还包含温度和太阳定向传感器、太阳能电池板的连接处和通信线路,用于通过连接桁架将电力、信息、气体和液体传输到轨道舱和返回舱,以确保组员的工作和生活。太阳能电池板在发射时堆叠在船体上,并在进入轨道后展开;此时,它们的跨度也略大于10.7米。在“联盟”飞船型号发展过程中,不同类型的太阳能电池板用于不同型号的“联盟”号。“联盟”号早期版本有两组电池,总表面积为14平方米,后来建造的飞船采用了三组太阳能电池。“联盟TM”和“联盟TMA”飞船采用四组太阳能电池板。最初,“联盟”号系列的飞船安装了太阳能电池板,后来它们被从飞船结构中移除,这种结构适用于执行太空“运输”的狭隘的任务:将船员运输到“礼炮”轨道站和返回地球。这个版本的联盟号,被称为7K-T,完全依靠蓄电池供电,能够维持三天的飞行:在这段时间里,在与轨道站交会和对接之前可以进行两天的飞行,并在轨道上多呆一天等待合适的时间开始着陆。正是这个版本的“联盟”号在1971年“联盟11”号飞行期间三名航天员遇难后投入使用。后来太阳能电池又出现在T、TM和TMA型“联盟”号飞船上。安装在“联盟T”上的新型太阳能电池比第一批“联盟”系列上用于自主飞行和飞往“礼炮1”号轨道站的太阳能电池尺寸更小、更高效。后来出现的“联盟TM”配备了具有三重冗余的电气系统,保障了航天器各个系统之间的能量分配得到改善。此外,其上出现了许多用于连接电源和电力需用设备的备用选项,这大大简化了飞船的操作并增加了其可靠性潜力——这适用于包括TMA型在内的最新“联盟”号改型。
离开国际空间站后,“联盟TMA-19”正在展示其太阳能电池板,这些电池板经过多次重新设计,变得特别平坦,每个太阳能电池阵列“翼”由四节组成。服务舱的下段有一个非加压推进部分,其中包含燃料箱、姿态控制喷气发动机、交会校正发动机和表面积为8平方米的散热器,设计用于排放通过辐射到太空的多余热量。服务舱外部安装有无线电通信天线和额外的姿态控制传感器。服务舱的重量约为2600千克。“联盟”号飞船是俄罗斯政府载人航天计划的重要组成部分,从1967年4月“联盟1”号首次载人发射开始,至今已在俄罗斯航天载人领域活跃50多年。在该航天飞船存在的这些年里,其改型工作,包括完善和改进,使其发生了众多改变,从而得到不断发展。“联盟”号的这些改变大多与内部结构有关:例如,执行飞行任务所需的设备、传感器和其他系统的电子元件得到了重大改进等。另外,除了载人功能外,2018年5月18日,俄罗斯科罗廖夫能源火箭航天集团官网信息显示,公司将在“联盟”号的基础上开发“联盟-GVK”型货运返回飞船,并计划于2022年完成建造。与“进步”号不同,该型飞船延续“联盟MS”载人飞船的基本设计,只将返回舱进行无人化处理以带回空间站相关物件。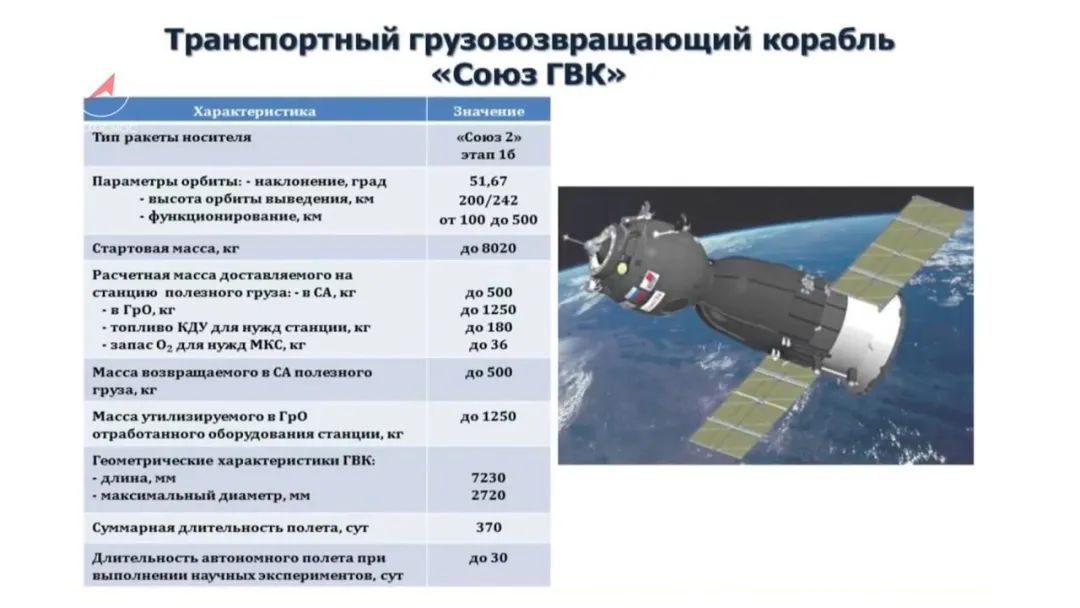
“联盟-GVK”型货运返回飞船基本技术参数
主要参考资料
[1] Полёты кораблей серии «Союз». http://www.astronaut.ru/register/spaceships.htm?reload_coolmenus
[2] Космические корабли "Союз". https://ria.ru/20170423/1492686798.html
[3] ДЭВИД БЕЙКЕР.Космический корабль «Союз». 06 января 2021
- The End -
声明:欢迎转发本号原创内容,转载和摘编需经本号授权并标注原作者和信息来源为云脑智库。本公众号目前所载内容为本公众号原创、网络转载或根据非密公开性信息资料编辑整理,相关内容仅供参考及学习交流使用。由于部分文字、图片等来源于互联网,无法核实真实出处,如涉及相关争议,请跟我们联系。我们致力于保护作者知识产权或作品版权,本公众号所载内容的知识产权或作品版权归原作者所有。本公众号拥有对此声明的最终解释权。
投稿/招聘/推广/合作/入群/赞助 请加微信:15881101905,备注关键词

微群关键词:天线、射频微波、雷达通信电子战、芯片半导体、信号处理、软件无线电、测试制造、相控阵、EDA仿真、通导遥、学术前沿、知识服务、合作投资.
“阅读是一种习惯,分享是一种美德,我们是一群专业、有态度的知识传播者.”
↓↓↓ 戳“阅读原文”,加入“知识星球”,发现更多精彩内容.
分享💬 点赞👍 在看❤️@以“三连”行动支持优质内容!




