 反激式转换器在连续导通模式 (CCM) 和非连续导通模式 (DCM)下都可以工作。但对许多低功耗和低电流应用而言,DCM反激式转换器更加紧凑而且成本更低。本文将详细介绍此类转换器的设计步骤。
反激式转换器在连续导通模式 (CCM) 和非连续导通模式 (DCM)下都可以工作。但对许多低功耗和低电流应用而言,DCM反激式转换器更加紧凑而且成本更低。本文将详细介绍此类转换器的设计步骤。
DCM操作的特点是转换器的整流器电流在下一个开关周期开始之前即减小至零。在切换前将电流降至零将减少场效应晶体管 (FET) 的耗散并降低整流器损耗,而且通常也会降低变压器的尺寸要求。
而CCM操作则直到整个开关周期结束时仍保持整流器的电流传导。我们在“设计反激式转换器时需要考虑的几大关键因素”和 “如何设计CCM反激式转换器”这两篇文章中曾介绍了反激式转换器的设计考量和CCM 反激式转换器的功率级公式。CCM操作最适合中高功率应用,但如果是低功率应用,则可以使用DCM 反激式转换器,请继续阅读下文。
图1显示了一个简化的反激原理图,它可以在DCM 或 CCM 模式下运行,并根据时序在模式之间进行切换。为了保持电路在DCM 模式下操作,如本文将要评估的,关键组件的开关波形应具有图2所示的特性。
在占空比周期D内,FET Q1导通,电路开始工作。T1原边绕组中的电流始终从零开始,上升至由原边绕组电感、输入电压和导通时间t1决定的峰值。在此 FET 导通时间内,二极管 D1因T1 的副边绕组极性而反向偏置,迫使所有输出电流在t1和t3期间由输出电容器 COUT 提供。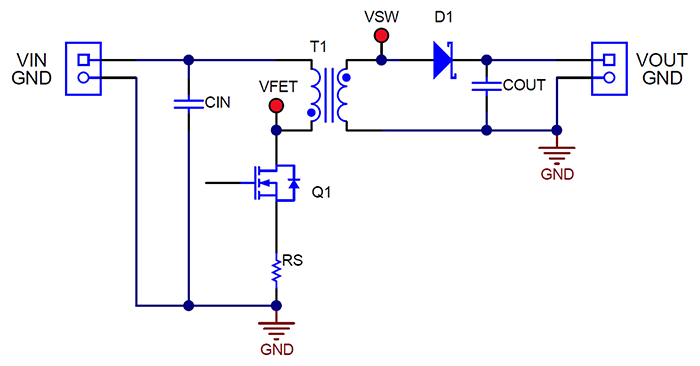
图 1:可在DCM或CCM模式下运行的简化反激式转换器原理图。
当 Q1 在周期 1-D 期间关断时,T1的副边电压极性反转,使D1 将电流传导至负载并对 COUT进行充电。D1中的电流在t2期间从其峰值线性下降至零。一旦T1存储的能量耗尽,在剩余时间段 t3 中只会剩余振铃。这种振铃主要是由于T1 的磁化电感以及 Q1、D1 和 T1 的寄生电容造成的。这在 t3 期间通过Q1的漏极电压很容易看出来,该电压从 VIN 加反射输出电压下降回VIN,因为一旦电流截止,T1就无法支持电压。(注意:t3 中若没有足够的死区时间,将可能进入CCM操作。)CIN 和 COUT 中的电流与Q1和D1中的电流相同,但没有直流偏移。
图 2 中的阴影区域A和B突出显示了变压器在t1和t2期间的伏微秒积,它们必须保持平衡以防止饱和。区域“A”代表 (Vin/Nps)×t1 ,而“B”代表 (Vout+Vd)×t2,均以副边为参考。Np/Ns是变压器原边与副边的匝数比。
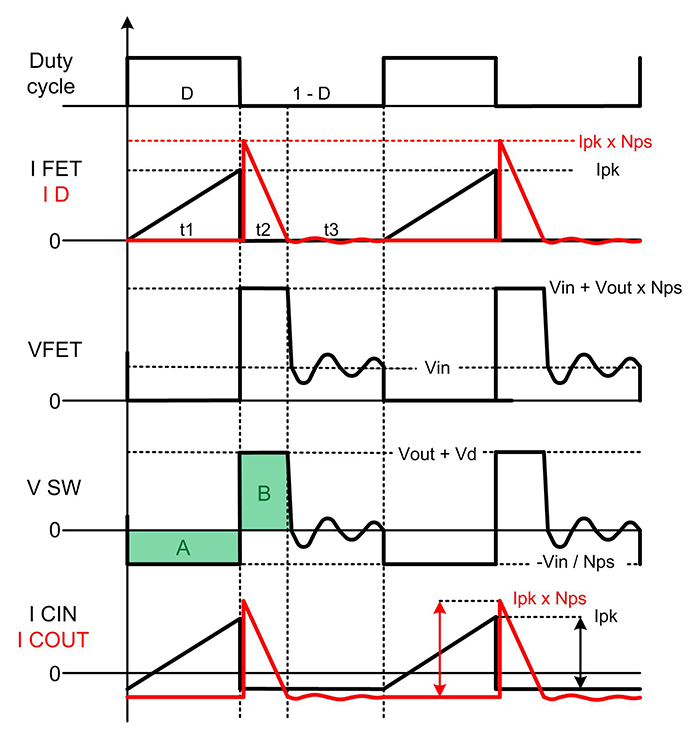
图2:DCM反激式转换器的关键电压和电流开关波形以及设计人员须指定的几个关键参数。
表1详细说明了DCM相对于CCM的特性。DCM的一个关键属性是,无论变压器的匝数比如何,具有较低的原边电感都会降低占空比。它让您可以限制设计的最大占空比。如果想要使用特定控制器或保持在特定的导通或关断时间限制之内,这一点可能很重要。较低的电感需要较低的平均能量存储(尽管具有较高的峰值FET电流),与CCM设计相比,通常也允许使用更小的变压器。
DCM 的另一个优点是这种设计消除了标准整流器中的 D1 反向恢复损耗,因为电流在 t2 结束时为零。反向恢复损耗通常表现为 Q1 中耗散的增加,因此消除它们会降低开关晶体管上的应力。输出电压越高,该优势愈加明显,因为整流器的反向恢复时间也随着二极管额定电压的增大而增加。
| DCM的优点 | DCM的缺点 |
| 原边电感低于CCM | 更高的峰值原边电流 |
| 通过电感设置最大占空比 | 更高的峰值整流器电流 |
| 可以使用更小的变压器 | 增加了输入电容 |
| 无整流器反向恢复损耗 | 增加了输出电容 |
| 无(或最小)FET 导通损耗 | 可能会增加电磁干扰 |
| 控制回路中没有右半平面零点 | 比 CCM 更宽的占空比操作 |
| 低输出功率的最佳选择 | 增加了带宽变化 |
表1:DCM 反激式设计相对于CCM设计的优缺点
开始设计之前,开发人员需要了解几个关键参数以及基本的电气规范。首先要选择开关频率 (fsw)、所需的最大占空比 (Dmax)以及估计的目标效率。然后根据公式1计算出时间t1:
 接下来,用公式 2 估算变压器的峰值原边电流 Ipk。对于公式 2 中的 FET 导通电压 (Vds_on) 和电流采样电阻电压 (VRS),先假设较小的0.5 V压降比较适合,稍后可以更新压降值。
接下来,用公式 2 估算变压器的峰值原边电流 Ipk。对于公式 2 中的 FET 导通电压 (Vds_on) 和电流采样电阻电压 (VRS),先假设较小的0.5 V压降比较适合,稍后可以更新压降值。
 根据图2中A和B面积相等,通过公式3计算所需的变压器匝数比Np/Ns:
根据图2中A和B面积相等,通过公式3计算所需的变压器匝数比Np/Ns:
 其中 x 是t3所需的最小空闲时间(从x = 0.2开始)。
其中 x 是t3所需的最小空闲时间(从x = 0.2开始)。
如果想要改变Np/Ns,则调整 Dmax并再次迭代计算。
接下来,用公式 4 和 5 来计算 Q1 (Vds_max) 和 D1 (VPIV_max) 的最大“平顶”电压:

 这些组件常常会因变压器漏电感而产生振铃,根据经验,实际值预计要比通过公式4和5得出的值高10-30%。如果Vds_max高于预期,减少Dmax可以降低它,但VPIV_max会增加。此时需要确定哪个组件电压更关键,并在必要时再次迭代计算。
这些组件常常会因变压器漏电感而产生振铃,根据经验,实际值预计要比通过公式4和5得出的值高10-30%。如果Vds_max高于预期,减少Dmax可以降低它,但VPIV_max会增加。此时需要确定哪个组件电压更关键,并在必要时再次迭代计算。
用公式 6 计算 t1_max,其值应与公式1接近:
 用公式 7 计算所需的最大原边电感:
用公式 7 计算所需的最大原边电感:
 如果选择的电感低于公式 7 算出的电感,则根据需要进行迭代计算,增加x并减少Dmax,直到Np/Ns和Lpri_max 等于所需要的值。
如果选择的电感低于公式 7 算出的电感,则根据需要进行迭代计算,增加x并减少Dmax,直到Np/Ns和Lpri_max 等于所需要的值。
然后,利用公式 8来计算 Dmax:
 并分别利用公式9 和 10 计算最大Ipk及其最大均方根 (RMS) 值:
并分别利用公式9 和 10 计算最大Ipk及其最大均方根 (RMS) 值:

 根据所选控制器的电流采样输入最小电流限制阈值 Vcs(公式 11),计算允许的最大电流采样电阻值:
根据所选控制器的电流采样输入最小电流限制阈值 Vcs(公式 11),计算允许的最大电流采样电阻值:
 使用公式 9得到的Ipkmax值和RS来验证假设的FET Vds压降和公式2中的采样电阻器VRS 是否接近;如果差别较大,则再次迭代。
使用公式 9得到的Ipkmax值和RS来验证假设的FET Vds压降和公式2中的采样电阻器VRS 是否接近;如果差别较大,则再次迭代。
利用公式 12 和 13以及公式10 的结果,来计算RS的最大耗散功率和Q1的传导损耗:

 FET 开关损耗通常在Vinmax处最高,因此最好利用公式14计算整个VIN范围内的Q1开关损耗:
FET 开关损耗通常在Vinmax处最高,因此最好利用公式14计算整个VIN范围内的Q1开关损耗:
 其中Qdrv是FET总栅极电荷,Idrv是预期的峰值栅极驱动电流。
其中Qdrv是FET总栅极电荷,Idrv是预期的峰值栅极驱动电流。
公式 15 和 16 用于计算FET非线性Coss电容充电和放电的总功率损耗。公式15中的被积函数应与0 V至实际工作Vds之间的实际FET Coss数据表曲线严格匹配。Coss损耗通常在高压应用或使用极低RDS(on) FET时最大,其Coss 值也较大。

 通过将公式 13、14和16的结果相加来估算总的FET 损耗。
通过将公式 13、14和16的结果相加来估算总的FET 损耗。
公式17表明该设计中的二极管损耗将大大简化。请确保选择额定副边峰值电流远大于 IOUT的二极管。
 输出电容通常选择公式 18 或 19 中值较大的那一个,这两个公式根据纹波电压和等效串联电阻(公式 18)或负载瞬态响应(公式 19)来计算电容:
输出电容通常选择公式 18 或 19 中值较大的那一个,这两个公式根据纹波电压和等效串联电阻(公式 18)或负载瞬态响应(公式 19)来计算电容:


其中 ∆IOUT 是输出负载电流的变化,∆VOUT 是允许的输出电压偏移,而fBW 是估计的转换器带宽。
用公式 20 计算输出电容器 RMS 电流:

用公式 21 和 22 估计输入电容器的参数:


公式 23、24 和 25 总结了三个关键的波形时间间隔及其关系:



如果需要额外的副边绕组,公式 26 可以轻松计算出额外的绕组 Ns2:
 其中 VOUT1 和 Ns1 是稳压输出电压。
其中 VOUT1 和 Ns1 是稳压输出电压。
变压器原边RMS 电流与公式 10 中的 FET RMS 电流相同;变压器副边RMS 电流如公式 27 所示。变压器磁芯必须能够在不饱和的情况下处理 Ipk。当然还要考虑磁芯损耗,但这不在本文讨论范围之内。
 从上述步骤中可以看出,DCM 反激式设计是一个迭代过程。开关频率、电感或匝数比等初始假设可能会根据后面的计算结果(例如功耗)改变。别怕麻烦,根据需要多次迭代执行设计步骤,以实现您需要的设计参数。只要付出努力,就可以实现最佳的DCM反激设计,提供低功耗、紧凑和低成本的解决方案,满足电源转换器的需求。
从上述步骤中可以看出,DCM 反激式设计是一个迭代过程。开关频率、电感或匝数比等初始假设可能会根据后面的计算结果(例如功耗)改变。别怕麻烦,根据需要多次迭代执行设计步骤,以实现您需要的设计参数。只要付出努力,就可以实现最佳的DCM反激设计,提供低功耗、紧凑和低成本的解决方案,满足电源转换器的需求。
扫码关注,每天学电子
▼

