

Funpack11期于10月31日截止后,到现在已审核完毕,相信审核通过的小伙伴都已经收到祝贺邮件了,那就静等返款吧。
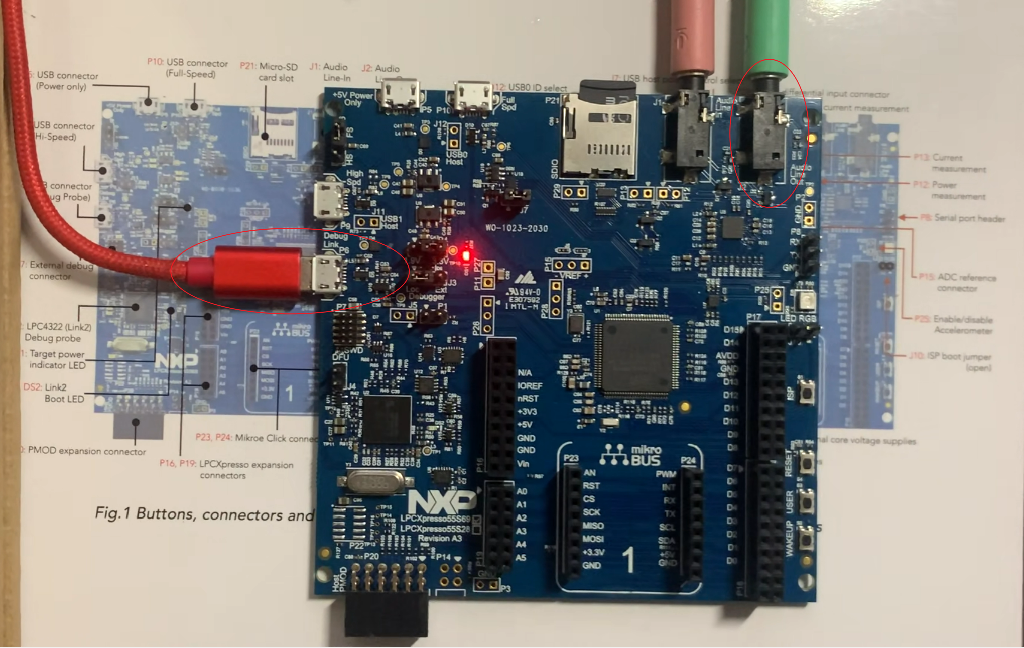
本期的任务也是很有用意思,四选一,难度中等。这款来自NXP的强大的LPC55S69-EVK在群友们和各种开源资料的帮助下被大家玩的非常深入,轻松完成这期的几个任务。
下面就来看看vic网友如何使用本期板卡实现音频播放器的吧。以下项目已开源在电子森林:https://www.eetree.cn/project/detail/626,大家感兴趣的可以来一起学习。
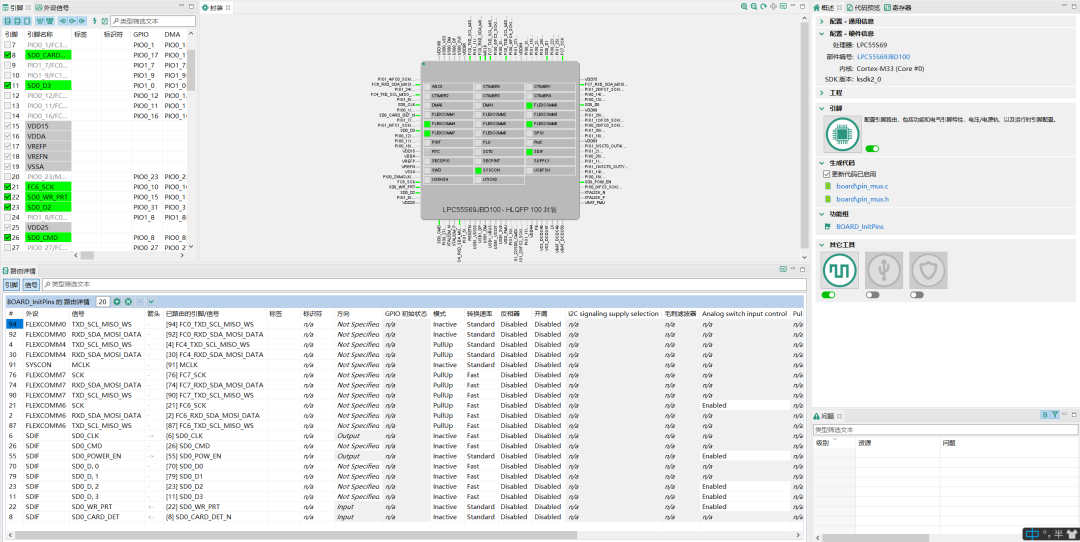
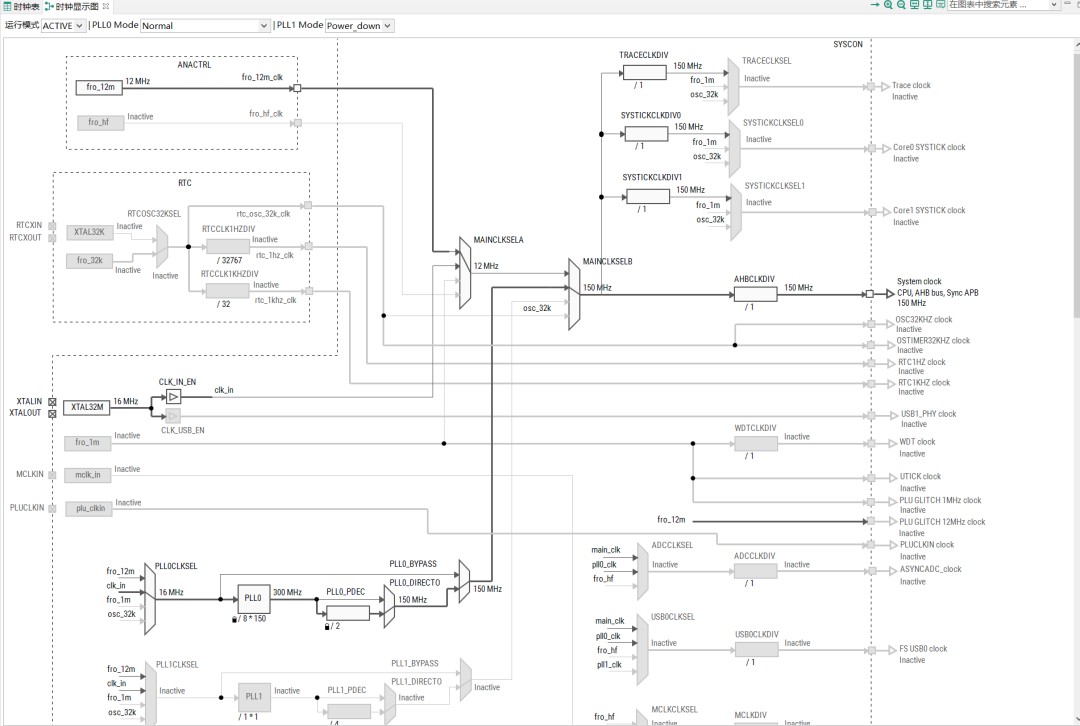
int main(void){int ret;/* set BOD VBAT level to 1.65V */POWER_SetBodVbatLevel(kPOWER_BodVbatLevel1650mv, kPOWER_BodHystLevel50mv, false);CLOCK_EnableClock(kCLOCK_InputMux);CLOCK_EnableClock(kCLOCK_Iocon);CLOCK_EnableClock(kCLOCK_Gpio0);CLOCK_EnableClock(kCLOCK_Gpio1);/* USART0 clock */CLOCK_AttachClk(BOARD_DEBUG_UART_CLK_ATTACH);/* I2C clock */CLOCK_AttachClk(kFRO12M_to_FLEXCOMM4);PMC->PDRUNCFGCLR0 |= PMC_PDRUNCFG0_PDEN_XTAL32M_MASK; /*!< Ensure XTAL16M is on */PMC->PDRUNCFGCLR0 |= PMC_PDRUNCFG0_PDEN_LDOXO32M_MASK; /*!< Ensure XTAL16M is on */SYSCON->CLOCK_CTRL |= SYSCON_CLOCK_CTRL_CLKIN_ENA_MASK; /*!< Ensure CLK_IN is on */ANACTRL->XO32M_CTRL |= ANACTRL_XO32M_CTRL_ENABLE_SYSTEM_CLK_OUT_MASK;/*!< Switch PLL0 clock source selector to XTAL16M */CLOCK_AttachClk(kEXT_CLK_to_PLL0);const pll_setup_t pll0Setup = {.pllctrl = SYSCON_PLL0CTRL_CLKEN_MASK | SYSCON_PLL0CTRL_SELI(2U) | SYSCON_PLL0CTRL_SELP(31U),.pllndec = SYSCON_PLL0NDEC_NDIV(125U),.pllpdec = SYSCON_PLL0PDEC_PDIV(8U),.pllsscg = {0x0U, (SYSCON_PLL0SSCG1_MDIV_EXT(3072U) | SYSCON_PLL0SSCG1_SEL_EXT_MASK)},.pllRate = 24576000U,.flags = PLL_SETUPFLAG_WAITLOCK};/*!< Configure PLL to the desired values */CLOCK_SetPLL0Freq(&pll0Setup);CLOCK_SetClkDiv(kCLOCK_DivPll0Clk, 0U, true);CLOCK_SetClkDiv(kCLOCK_DivPll0Clk, 1U, false);/* I2S clocks */CLOCK_AttachClk(kPLL0_DIV_to_FLEXCOMM6);CLOCK_AttachClk(kPLL0_DIV_to_FLEXCOMM7);/* Attach PLL clock to MCLK for I2S, no divider */CLOCK_AttachClk(kPLL0_to_MCLK);SYSCON->MCLKDIV = SYSCON_MCLKDIV_DIV(0U);SYSCON->MCLKIO = 1U;/* reset FLEXCOMM for I2C */RESET_PeripheralReset(kFC4_RST_SHIFT_RSTn);/* reset FLEXCOMM for DMA0 */RESET_PeripheralReset(kDMA0_RST_SHIFT_RSTn);/* reset FLEXCOMM for I2S */RESET_PeripheralReset(kFC6_RST_SHIFT_RSTn);RESET_PeripheralReset(kFC7_RST_SHIFT_RSTn);/* reset NVIC for FLEXCOMM6 and FLEXCOMM7 */NVIC_ClearPendingIRQ(FLEXCOMM6_IRQn);NVIC_ClearPendingIRQ(FLEXCOMM7_IRQn);/* Enable interrupts for I2S */EnableIRQ(FLEXCOMM6_IRQn);EnableIRQ(FLEXCOMM7_IRQn);/* Initialize the rest */BOARD_InitPins();BOARD_BootClockPLL1_150M();BOARD_InitDebugConsole();BOARD_InitSysctrl();PRINTF("\r\n");PRINTF("**********************************\r\n");PRINTF("Maestro audio solutions demo start\r\n");PRINTF("**********************************\r\n");PRINTF("\r\n");ret = BOARD_CODEC_Init();if (ret){PRINTF("CODEC_Init failed\r\n");return -1;}if (xTaskCreate(APP_SDCARD_Task, "SDCard Task", SDCARD_TASK_STACK_SIZE, &app, configMAX_PRIORITIES - 4, NULL) !=pdPASS){PRINTF("\r\nFailed to create application task\r\n");while (1);}/* Set shell command task priority = 1 */if (xTaskCreate(APP_Shell_Task, "Shell Task", SHELL_TASK_STACK_SIZE, &app, configMAX_PRIORITIES - 5,&app.shell_task_handle) != pdPASS){PRINTF("\r\nFailed to create application task\r\n");while (1);}/* Run RTOS */vTaskStartScheduler();/* Should not reach this statement */return 0;}
void APP_SDCARD_Task(void *param){const TCHAR driverNumberBuffer[3U] = {SDDISK + '0', ':', '/'};FRESULT error;app_handle_t *app = (app_handle_t *)param;app->sdcardSem = xSemaphoreCreateBinary();BOARD_SD_Config(&g_sd, APP_SDCARD_DetectCallBack, BOARD_SDMMC_SD_HOST_IRQ_PRIORITY, app);PRINTF("[APP_SDCARD_Task] start\r\n");/* SD host init function */if (SD_HostInit(&g_sd) != kStatus_Success){PRINTF("[APP_SDCARD_Task] SD host init failed.\r\n");vTaskSuspend(NULL);}/* Small delay for SD card detection logic to process */vTaskDelay(100 / portTICK_PERIOD_MS);while (1){/* Block waiting for SDcard detect interrupt */xSemaphoreTake(app->sdcardSem, portMAX_DELAY);if (app->sdcardInserted != app->sdcardInsertedPrev){app->sdcardInsertedPrev = app->sdcardInserted;SD_SetCardPower(&g_sd, false);if (app->sdcardInserted){/* power on the card */SD_SetCardPower(&g_sd, true);if (f_mount(&app->fileSystem, driverNumberBuffer, 0U)){PRINTF("[APP_SDCARD_Task] Mount volume failed.\r\n");continue;}#if (FF_FS_RPATH >= 2U)error = f_chdrive((char const *)&driverNumberBuffer[0U]);if (error){PRINTF("[APP_SDCARD_Task] Change drive failed.\r\n");continue;}#endifPRINTF("[APP_SDCARD_Task] SD card drive mounted\r\n");xSemaphoreGive(app->sdcardSem);}}}}
uint32_t ulTaskGenericNotifyTake( UBaseType_t uxIndexToWait,BaseType_t xClearCountOnExit,TickType_t xTicksToWait ){uint32_t ulReturn;configASSERT( uxIndexToWait < configTASK_NOTIFICATION_ARRAY_ENTRIES );taskENTER_CRITICAL();{/* Only block if the notification count is not already non-zero. */if( pxCurrentTCB->ulNotifiedValue[ uxIndexToWait ] == 0UL ){/* Mark this task as waiting for a notification. */pxCurrentTCB->ucNotifyState[ uxIndexToWait ] = taskWAITING_NOTIFICATION;if( xTicksToWait > ( TickType_t ) 0 ){prvAddCurrentTaskToDelayedList( xTicksToWait, pdTRUE );traceTASK_NOTIFY_TAKE_BLOCK( uxIndexToWait );/* All ports are written to allow a yield in a critical* section (some will yield immediately, others wait until the* critical section exits) - but it is not something that* application code should ever do. */portYIELD_WITHIN_API();}else{mtCOVERAGE_TEST_MARKER();}}else{mtCOVERAGE_TEST_MARKER();}}taskEXIT_CRITICAL();taskENTER_CRITICAL();{traceTASK_NOTIFY_TAKE( uxIndexToWait );ulReturn = pxCurrentTCB->ulNotifiedValue[ uxIndexToWait ];if( ulReturn != 0UL ){if( xClearCountOnExit != pdFALSE ){pxCurrentTCB->ulNotifiedValue[ uxIndexToWait ] = 0UL;}else{pxCurrentTCB->ulNotifiedValue[ uxIndexToWait ] = ulReturn - ( uint32_t ) 1;}}else{mtCOVERAGE_TEST_MARKER();}pxCurrentTCB->ucNotifyState[ uxIndexToWait ] = taskNOT_WAITING_NOTIFICATION;}taskEXIT_CRITICAL();return ulReturn;}
int BOARD_CODEC_Init(void){CODEC_Init(&codecHandle, &boardCodecConfig);/* Invert the DAC data in order to output signal with correct polarity - set DACL_DATINV and DACR_DATINV = 1 */WM8904_WriteRegister((wm8904_handle_t *)codecHandle.codecDevHandle, WM8904_AUDIO_IF_0, 0x1850);/* Initial volume kept low for hearing safety. */CODEC_SetVolume(&codecHandle, kCODEC_PlayChannelHeadphoneLeft | kCODEC_PlayChannelHeadphoneRight, 75);return 0;}
END
硬禾学堂
硬禾团队一直致力于给电子工程师和相关专业的同学,带来规范的核心技能课程,帮助大家在学习和工作的各个阶段,都能有效地提升自己的职业能力。

硬禾学堂
我们一起在电子领域探索前进
关注硬禾公众号,随时直达课堂

点击阅读原文查看更多
