淘宝买东西的时候看见了有刷的机架了,插一句其实TT就是有刷的,就是下图这个样子。

7.5元一套!!!(白给,8520的电机也好几块)

这个是28元(无刷的),虽然性能强劲但是它需要电调x4
那我没钱我肯定看便宜的七块五的机架,但是你想飞起来,有机械结构没什么用,还得电子结构。
你想我机架才7.5元,里面的东西也不能太贵了。。。
我这里插一下,无刷的无人机你得有,飞控,电调,电机,机架,接收器这是最基本的配置。看下面的一个图。
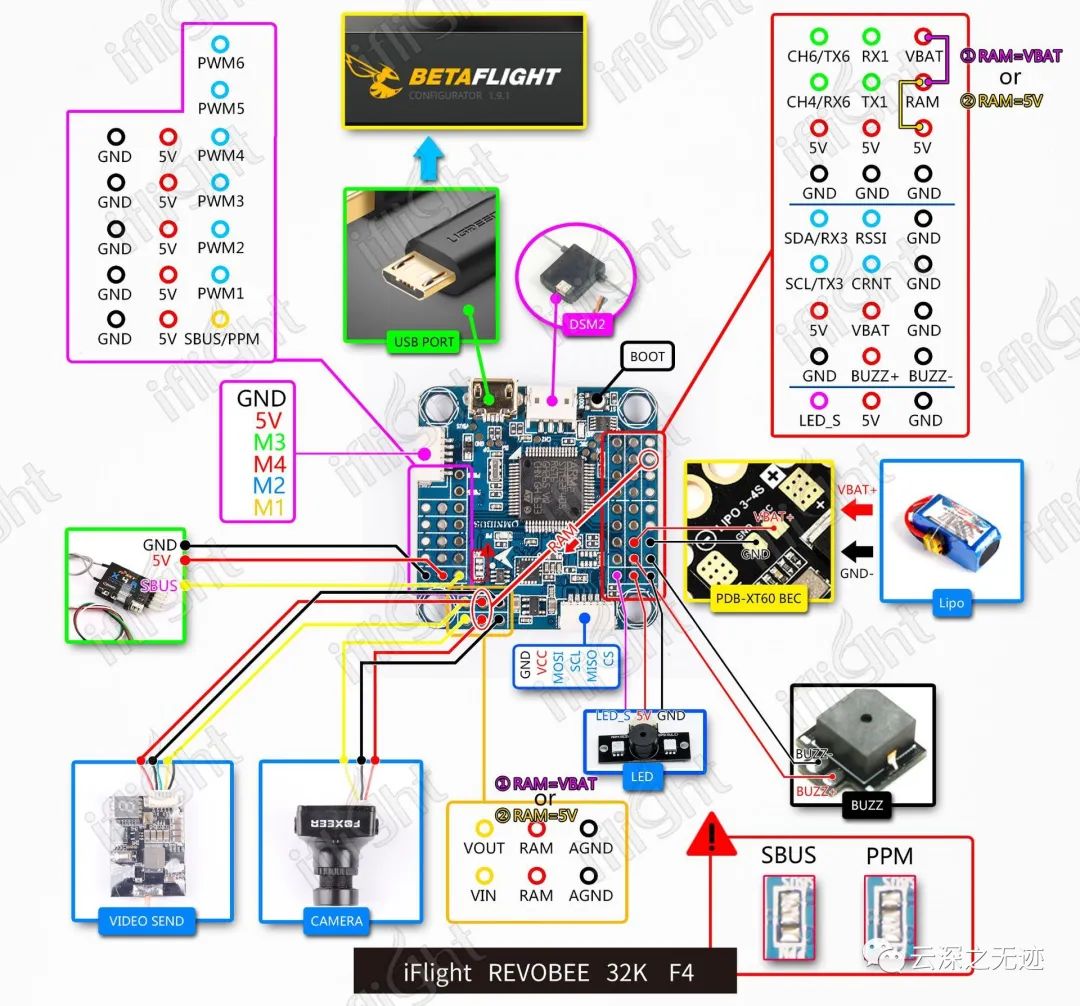
你一台说的过去的穿越机差不多这些东西才像话
但是空心杯就简单了,飞控+电机+电池+机架就差不多可以了。
然后我就去深水<・)))><<摸鱼去。
首先上钩的是这个:
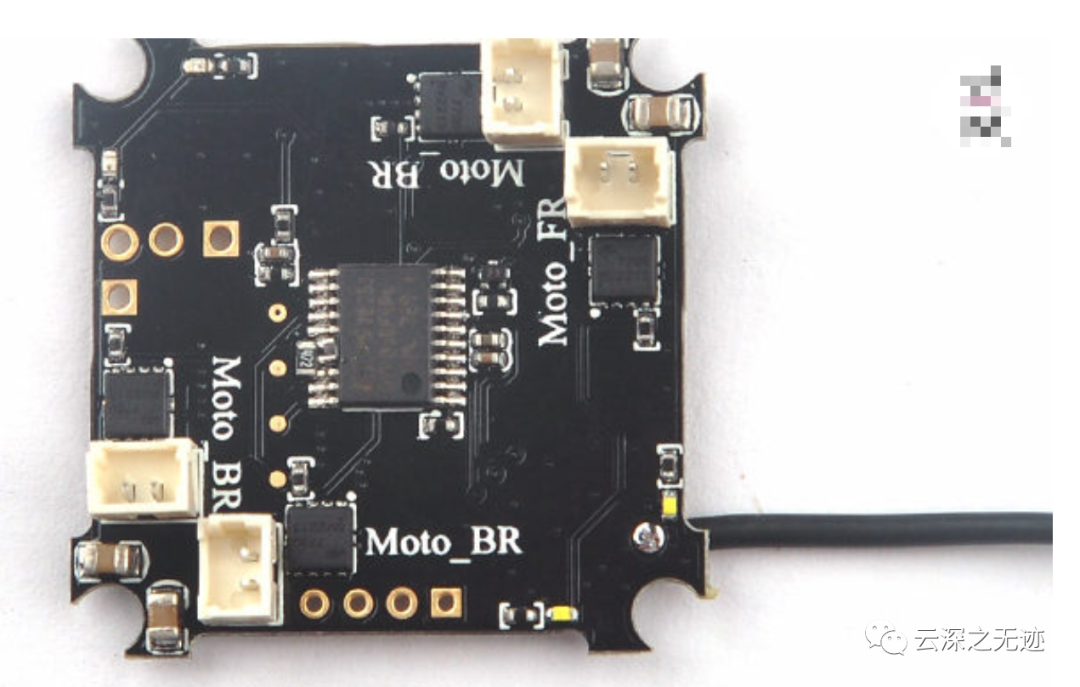
就是这个样子的
有刷飞控 BEECORE Lite精简版 Silverware固件Bayang协议 室内穿越
BEECORE Lite只能谷歌看见
后面

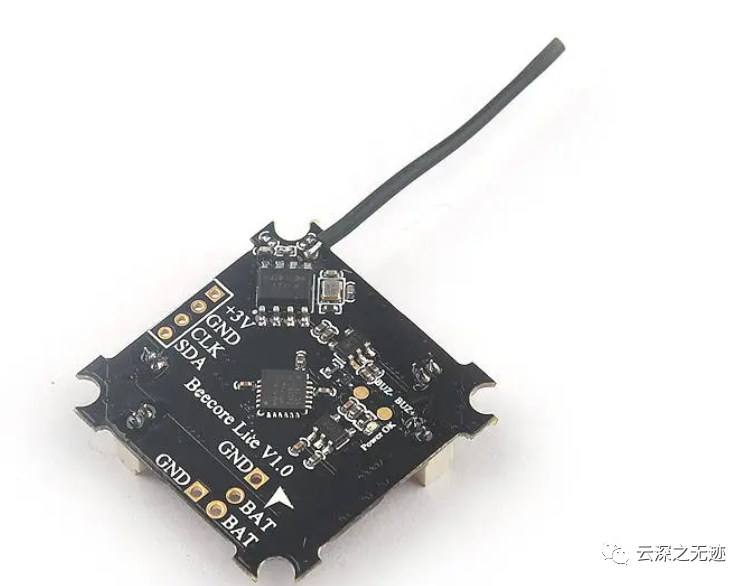
摆正
才2.5g
上面也集成了RF芯片,就是自己带了接收器
https://datasheet.lcsc.com/szlcsc/XN297L_C88025.pdf数据手册在此
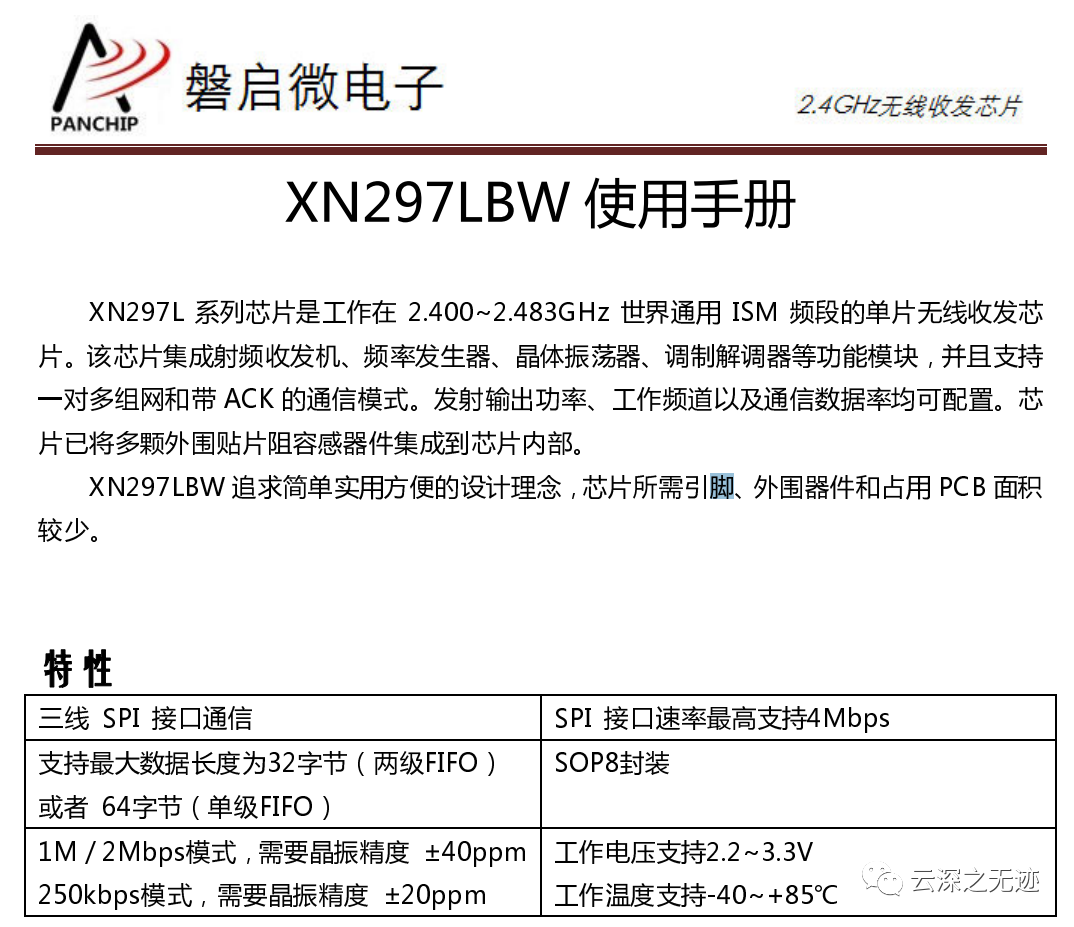
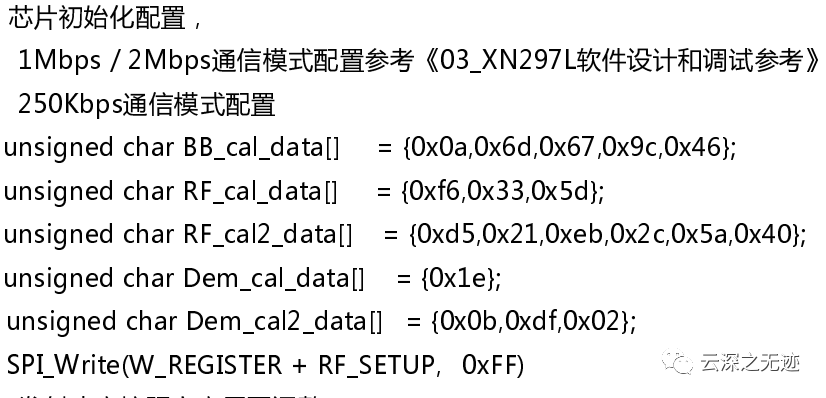
http://www.panchip.com/static/upload/file/20190916/1568621331607821.pdf这个是英文的数据手册,编程的时候可以使用看看
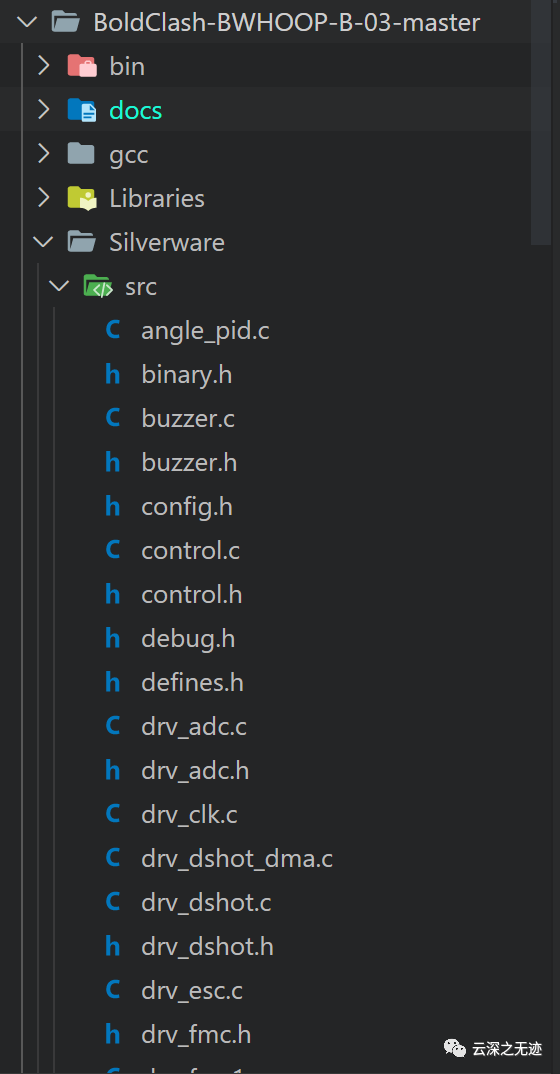
https://github.com/silver13/BoldClash-BWHOOP-B-03使用的固件地址在此!名字叫BoldClash-BWHOOP-B-03
其实最后代码合并到SW固件里面,都可以
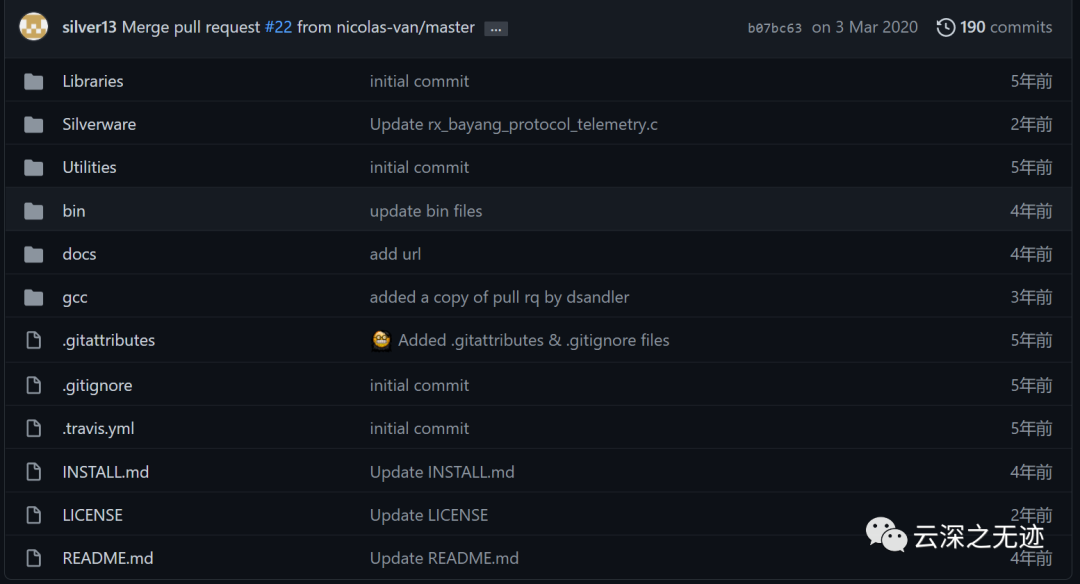
完整的源码,可以使用keli编译,使用ST-Link V2烧录
https://github.com/silver13/BoldClash-BWHOOP-B-03/tree/master/bin也可以直接来烧录
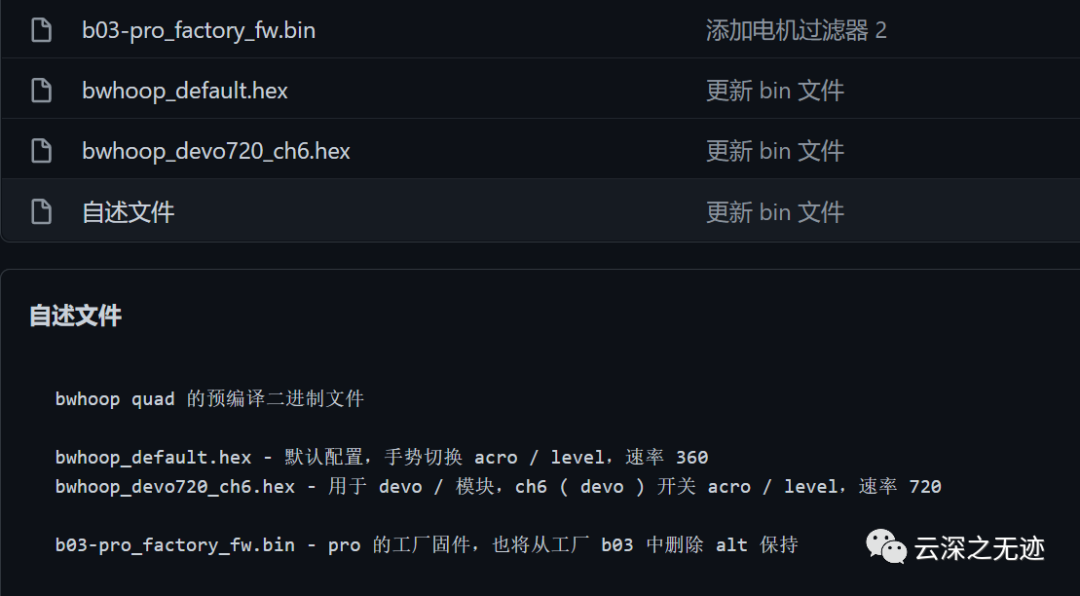
库中给三个编译好的固件
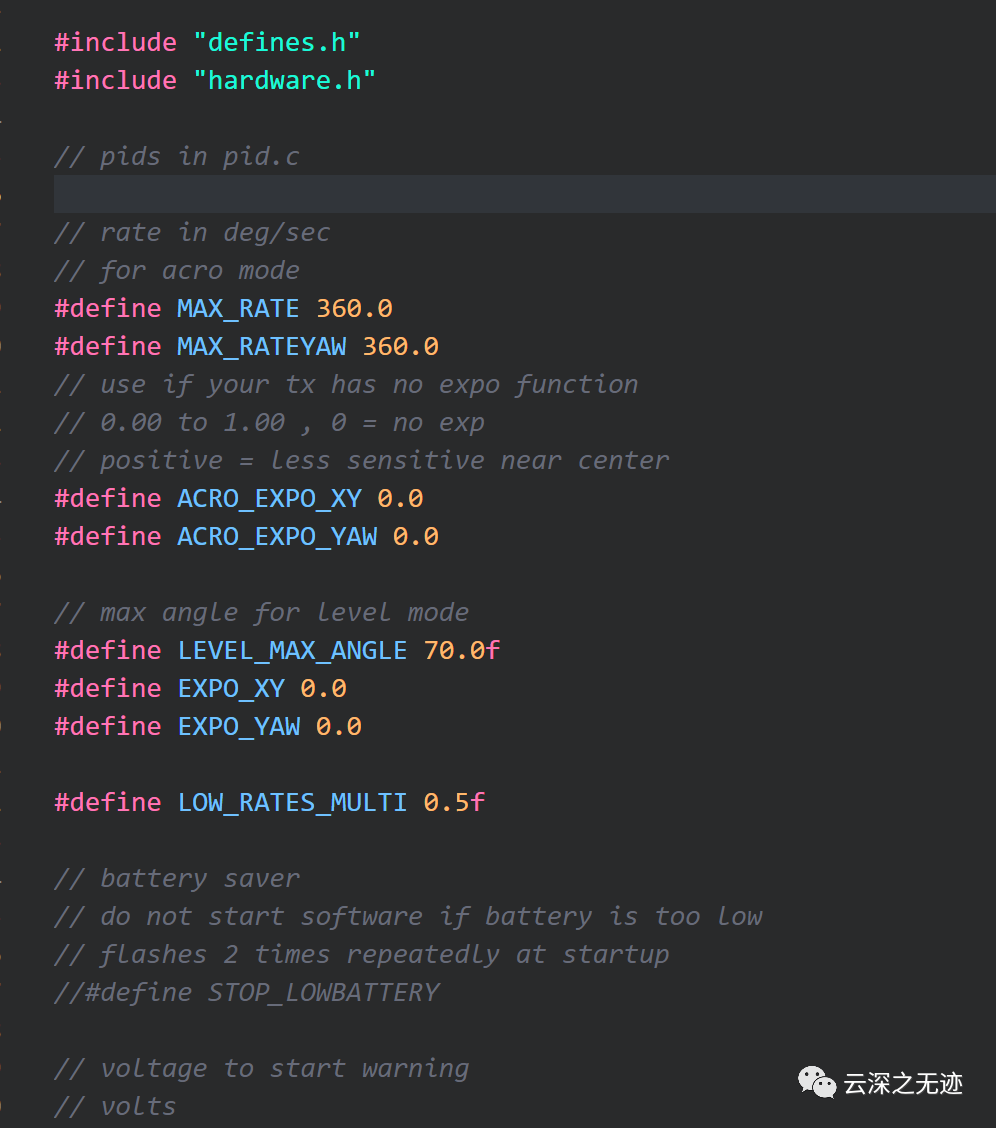
编译嘛,一定是自定义了东西
更改这个配置的头文件就行
这学起来不是香哭了
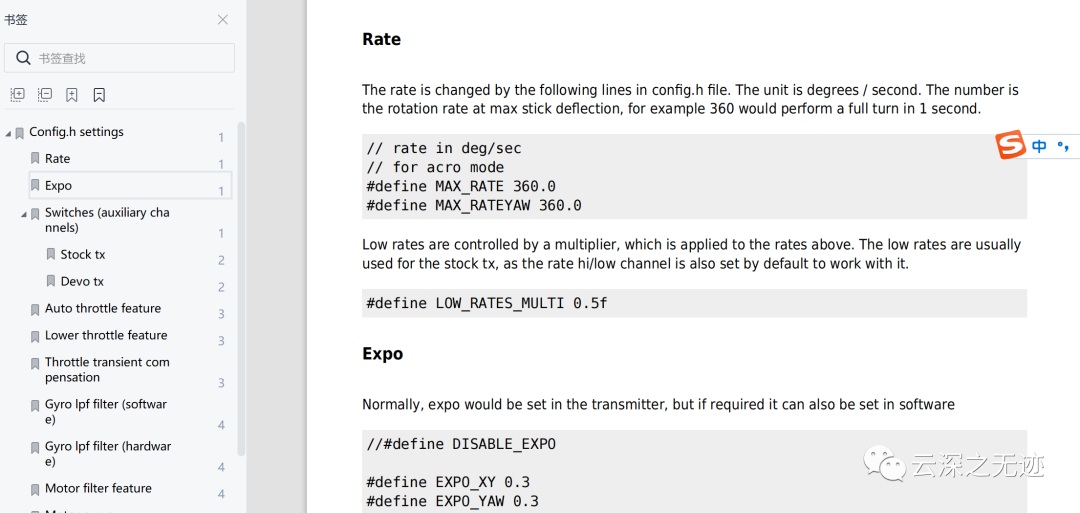
里面还有一个PDF的文件就是说这个配置文件的
注意keli安装STM32F030 这个MDK的支持包。
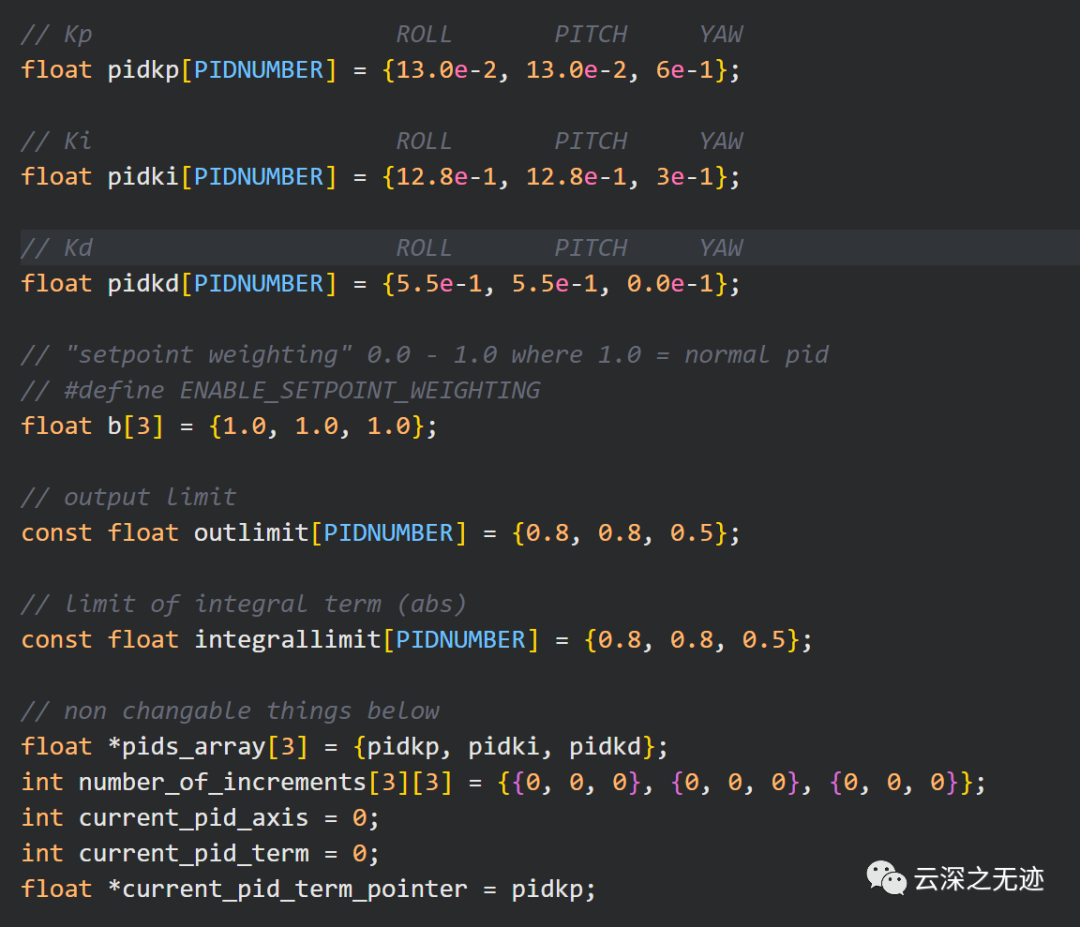
调整pid的时候,选择pid.c这个文件进行操作
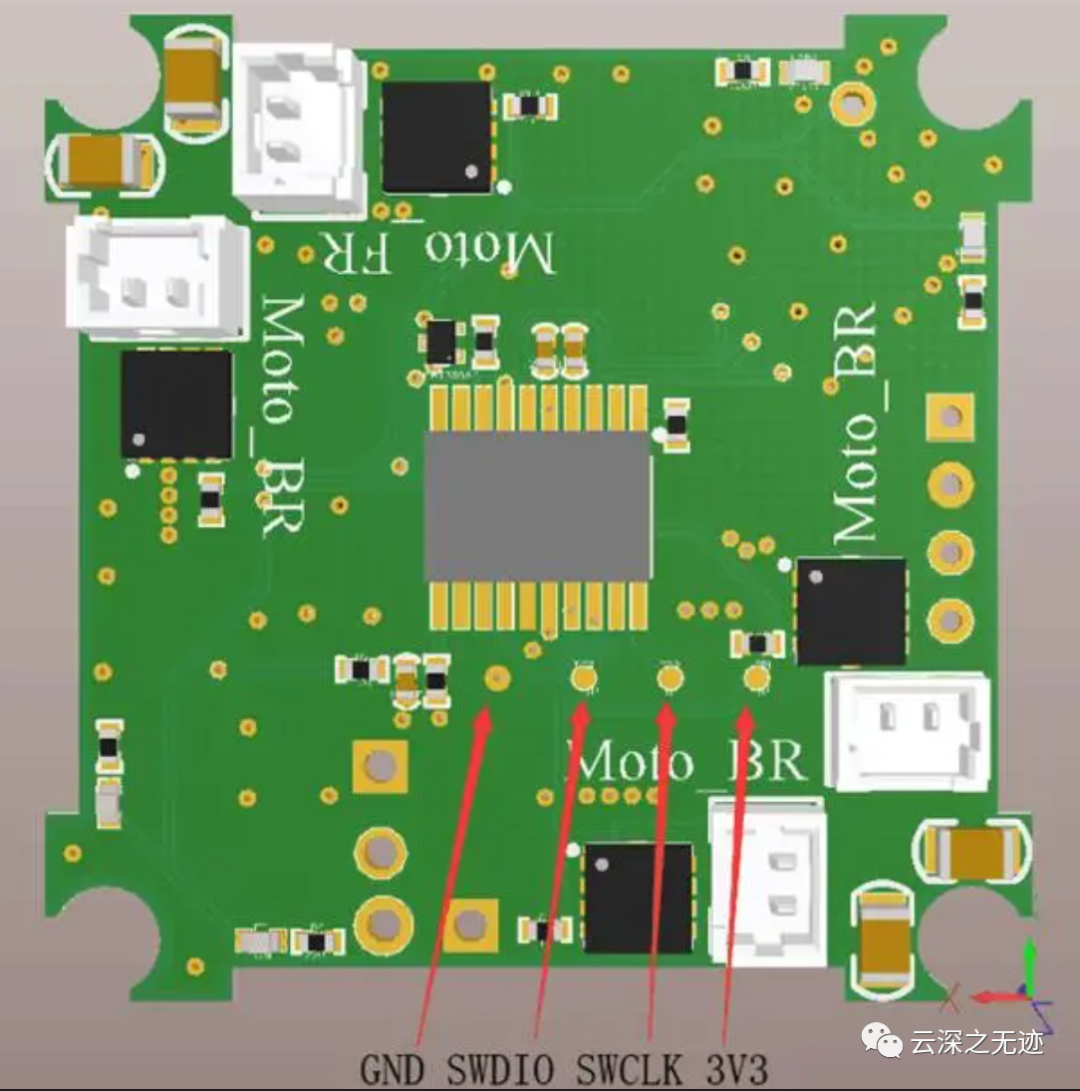
烧录的时候看这里的接口

机架的选择可以使用这个小涵道
下面说说这个遥控器哈,使用的是bayang的协议。我都没怎么听说过。后来群里面大佬说可以看看gh,多协议高频头这个东西。啧,是我浅薄了。
https://github.com/pascallanger/DIY-Multiprotocol-TX-Module
这个项目的logo
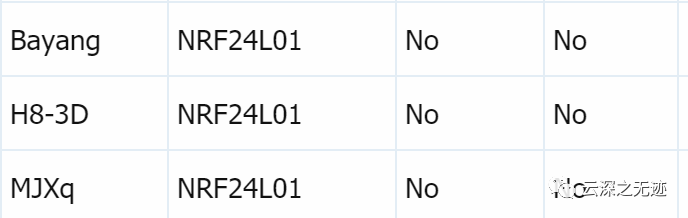
喜闻乐见的支持bayang,然后使用NRF24L01芯片发送的
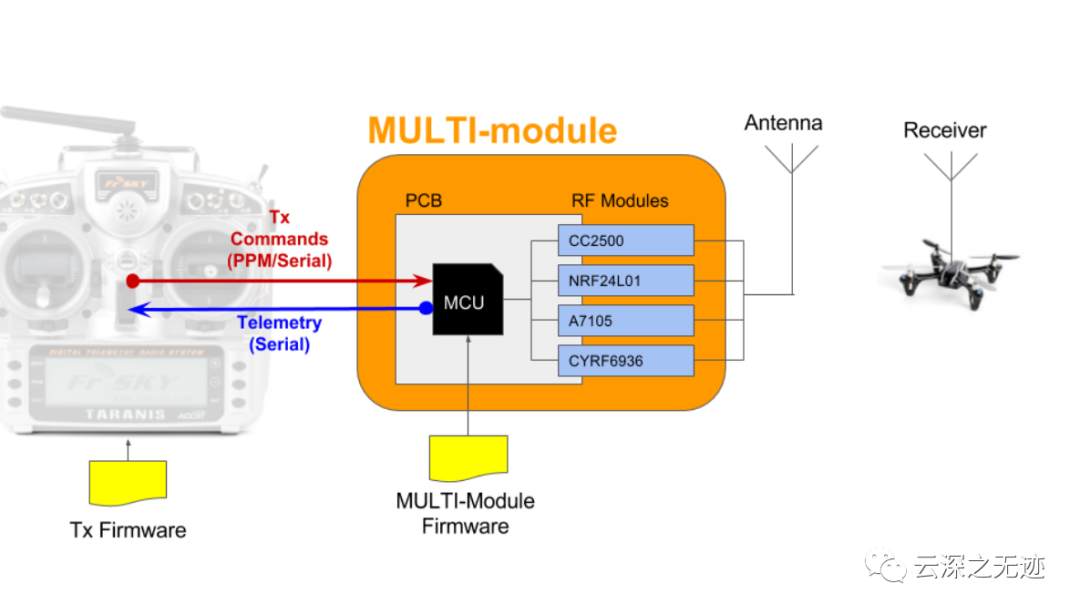
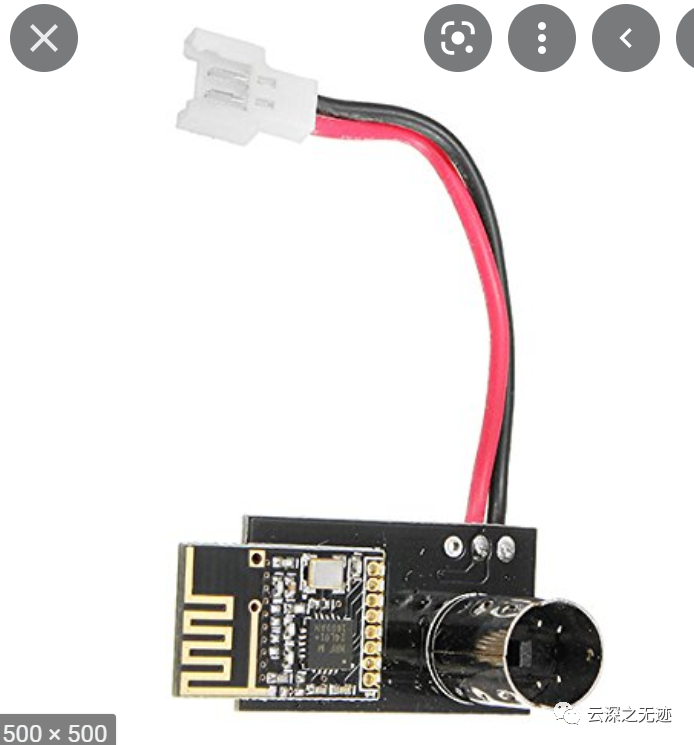
看这个图就懂啦,遥控器的杆量发送给这个MM小设备
然后MM的固件完成编码使用内置的芯片发送出去,其实就是一个中间人转换
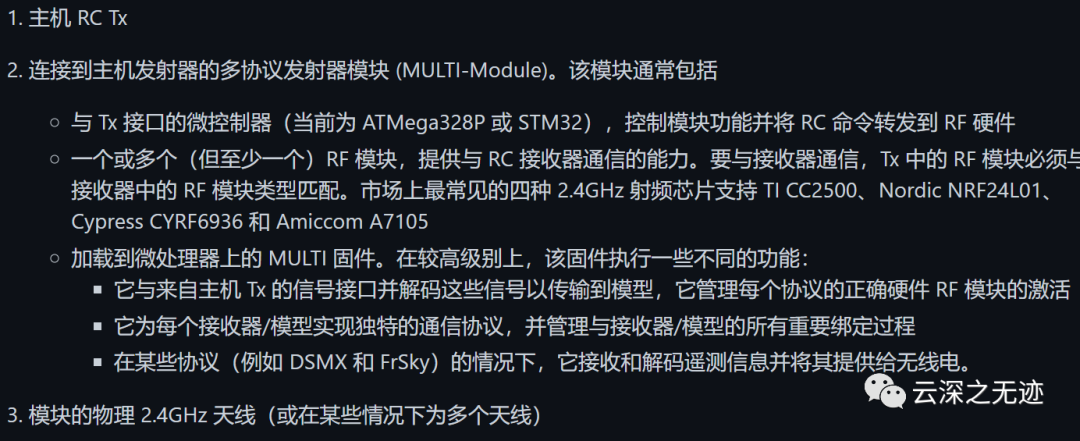
看这个官网的更清晰

当然里面的MCU可以使用ATmel的芯片以及STM32
我觉得ESP32完全OK~

我们的baynag协议在里面
https://github.com/pascallanger/DIY-Multiprotocol-TX-Module/blob/master/Protocols_Details.md#BAYANG---14传送门

在里面重点说了这个bayang协议的回传功能
只要遥控器有PPM和串行就可以使用
英文顺眼

wiki里面有硬件说明
MCU+PCB+4个不同的芯片
https://github.com/pascallanger/DIY-Multiprotocol-TX-Module/blob/master/docs/Module_Build_yourself_PCB.md#V23D_Schematic具体构建的位置(硬件)
原理图
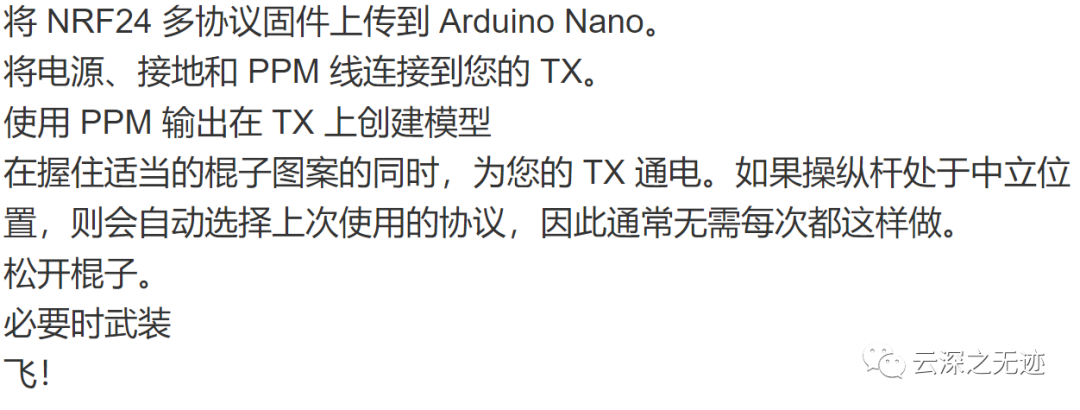
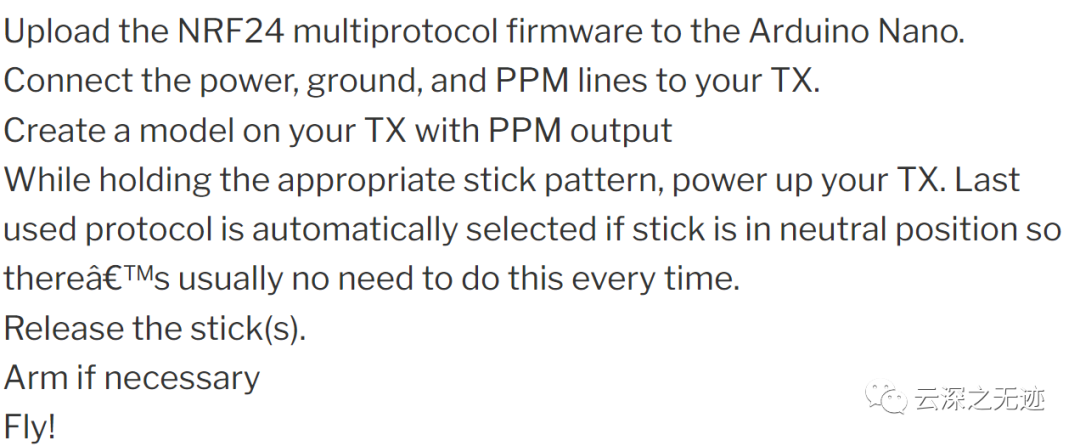
https://github.com/pascallanger/DIY-Multiprotocol-TX-Module/blob/master/docs/Compiling.md软件的编译位置。
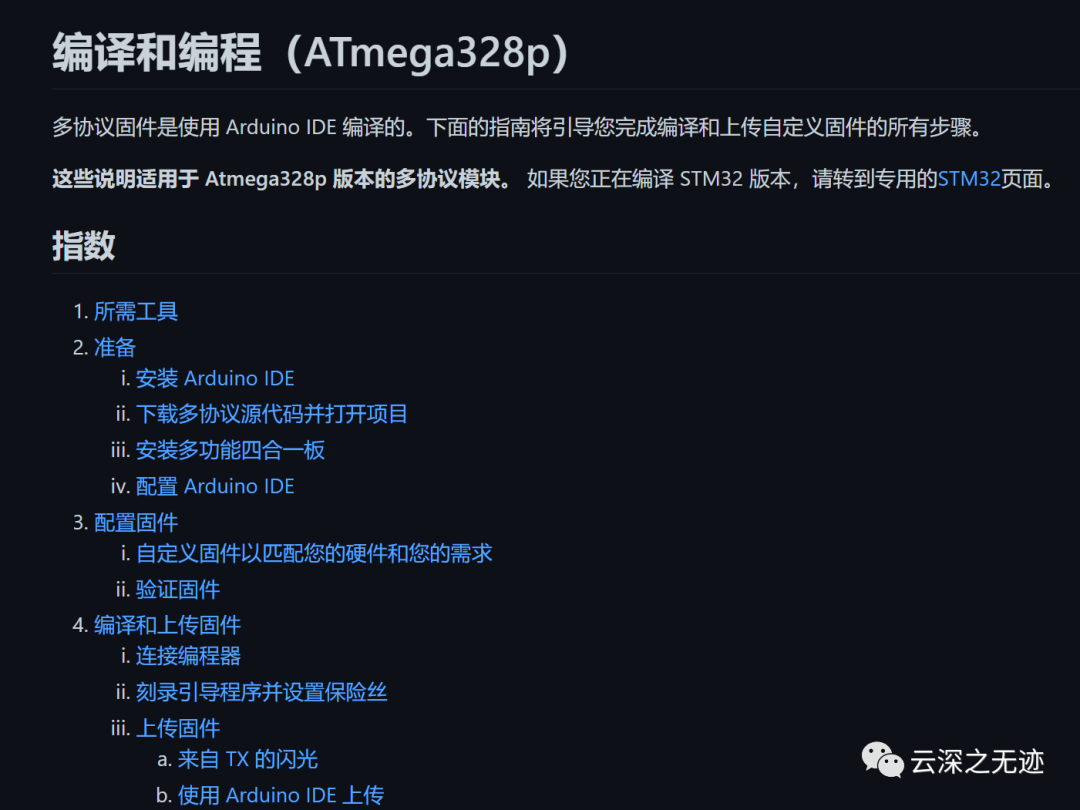
这个的话就可以使用Arduino来编写程序了
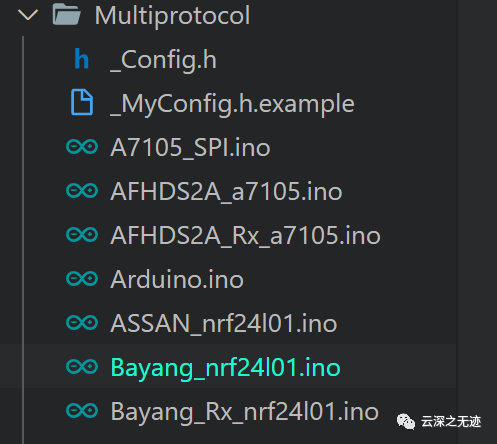
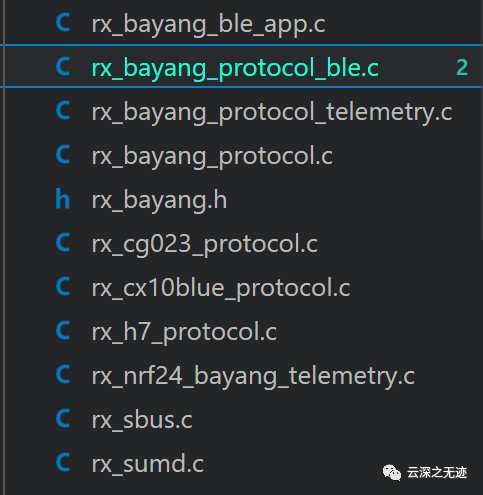
克隆库里面的文件,打开可以找到我们的协议
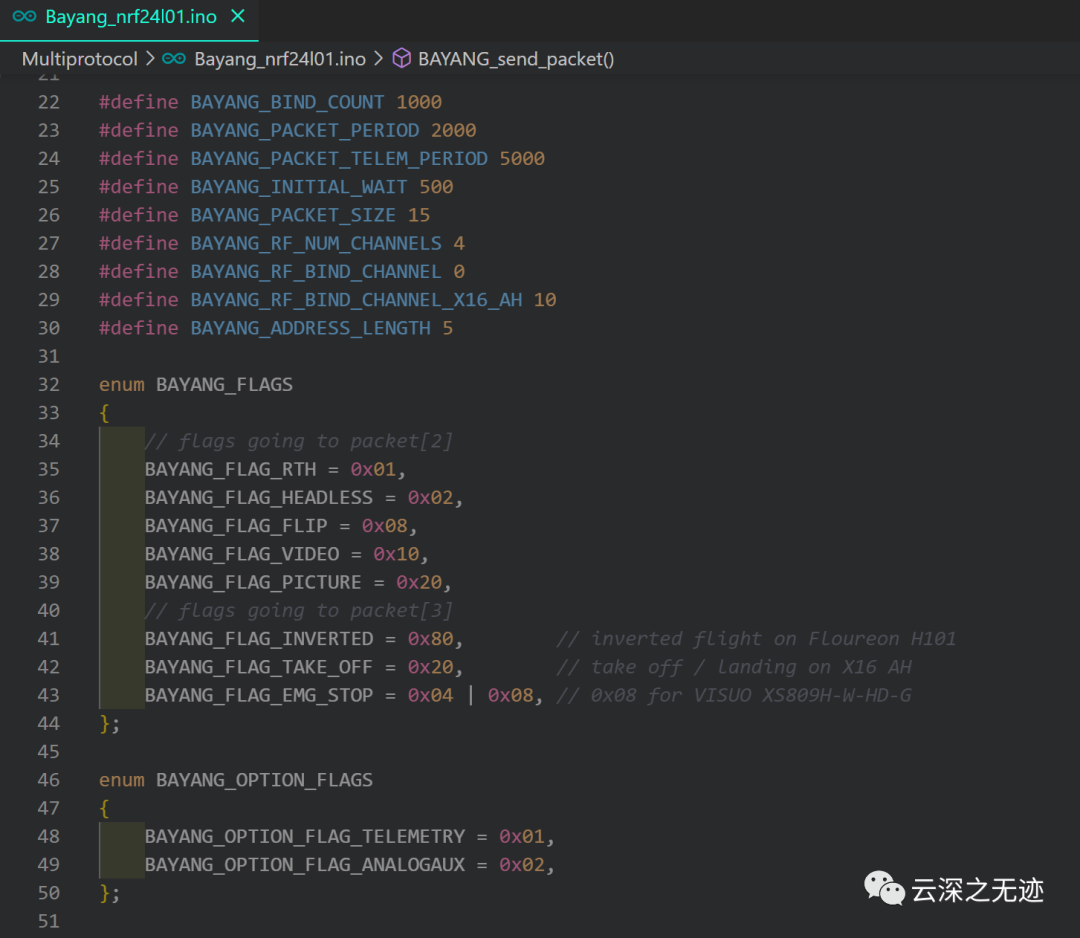
协议定义,源码告诉我一切
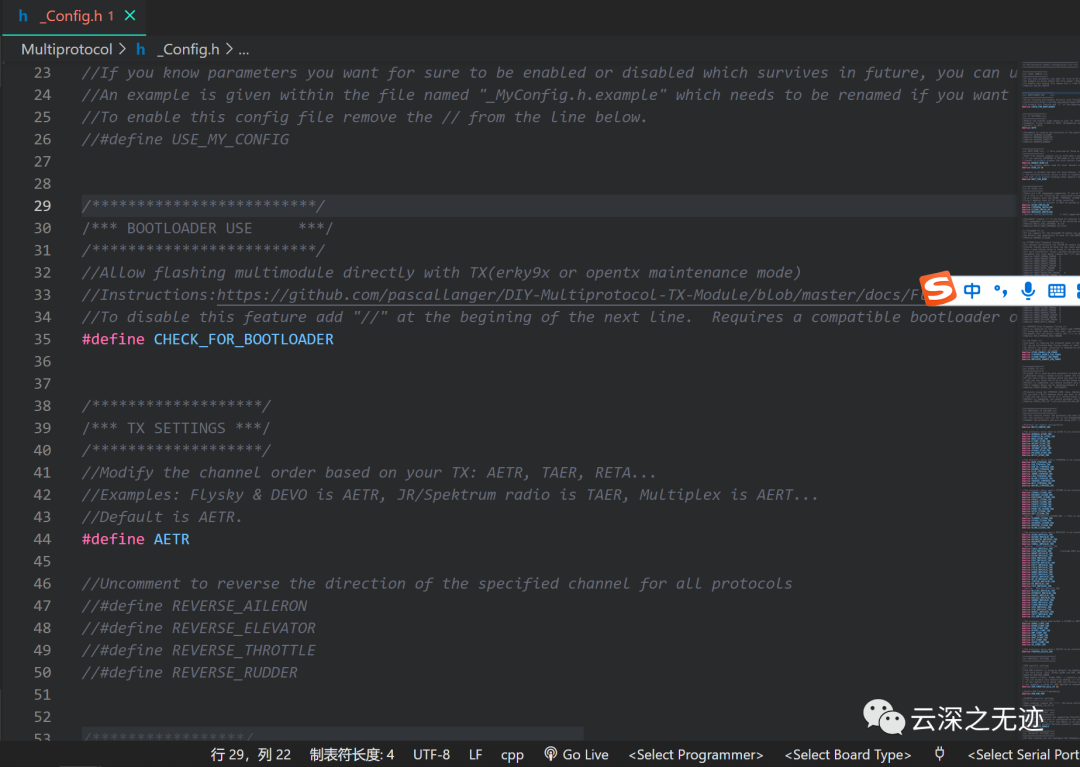
这里是自定义固件需求

对于你转换器做完以后,你就需要和你的遥控器安装在一起
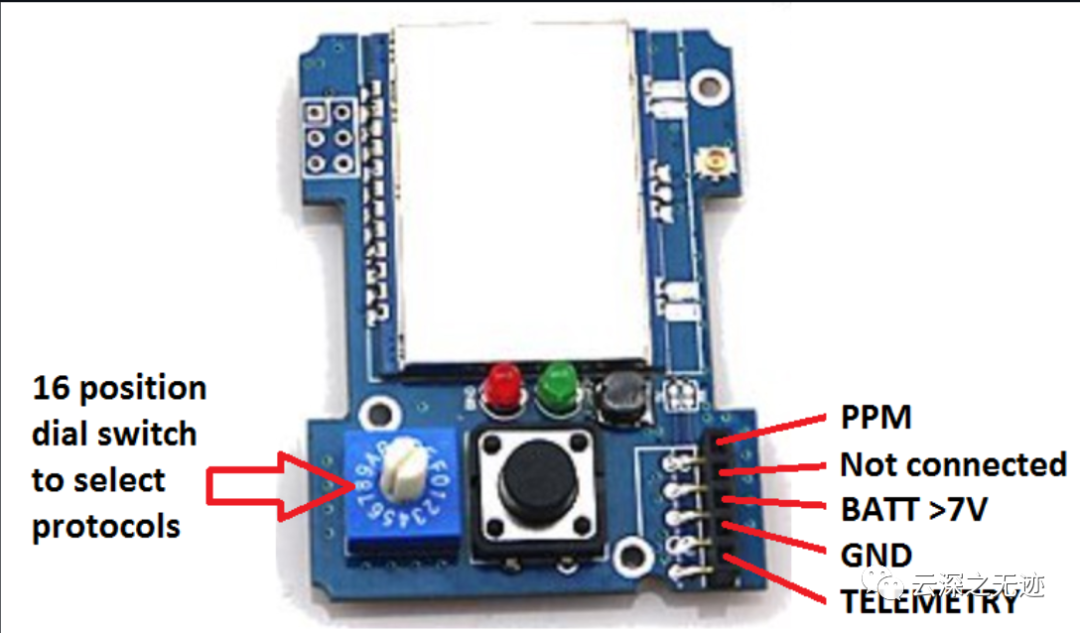
我遥控器不高级,只能使用PPM了
如果没有PPM那也可以使用PWM的,然后使用一个转换模块。

这个遥控器后面的教练口可以使用PPM
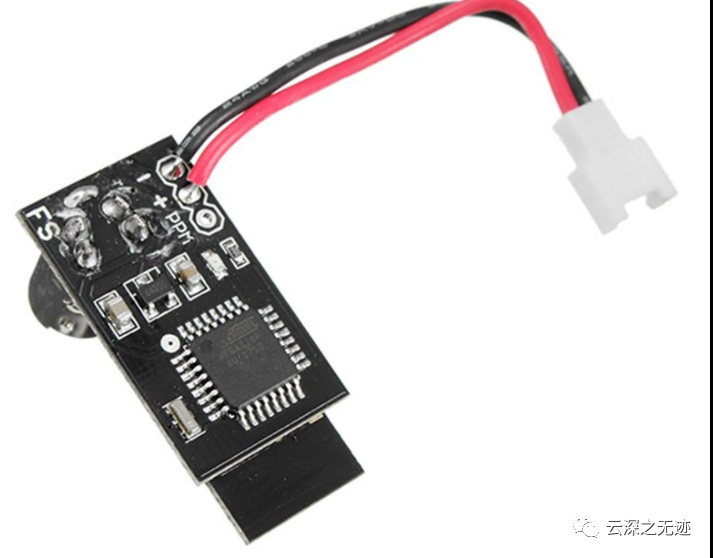
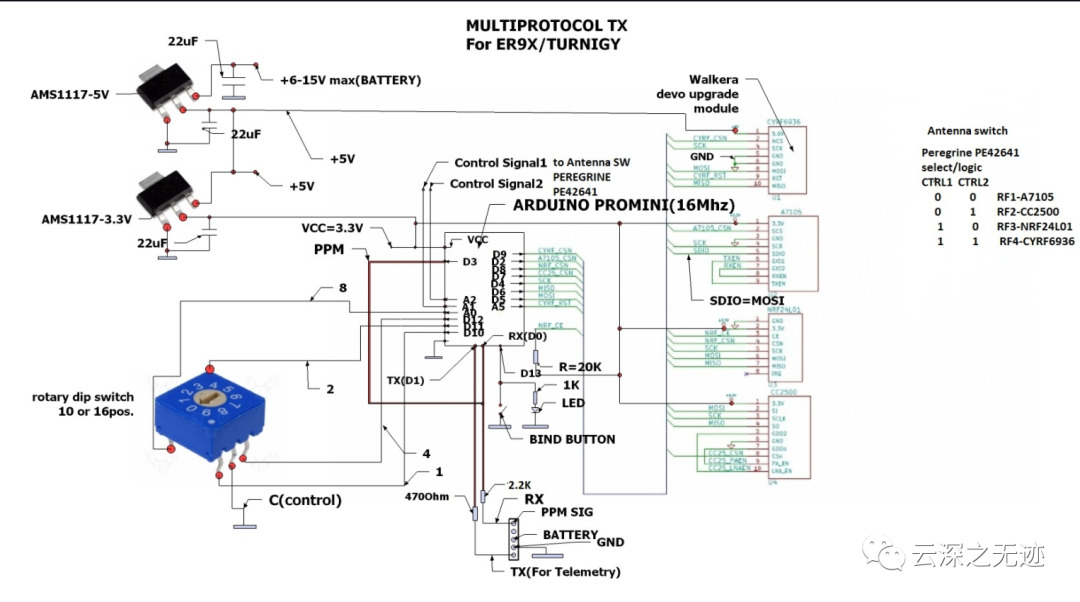
后面用的Atmel芯片,这个图比较清晰
找到一个低成本教如何做的:
https://www.jaylagare.com/2019/04/building-a-better-multiprotocol-module/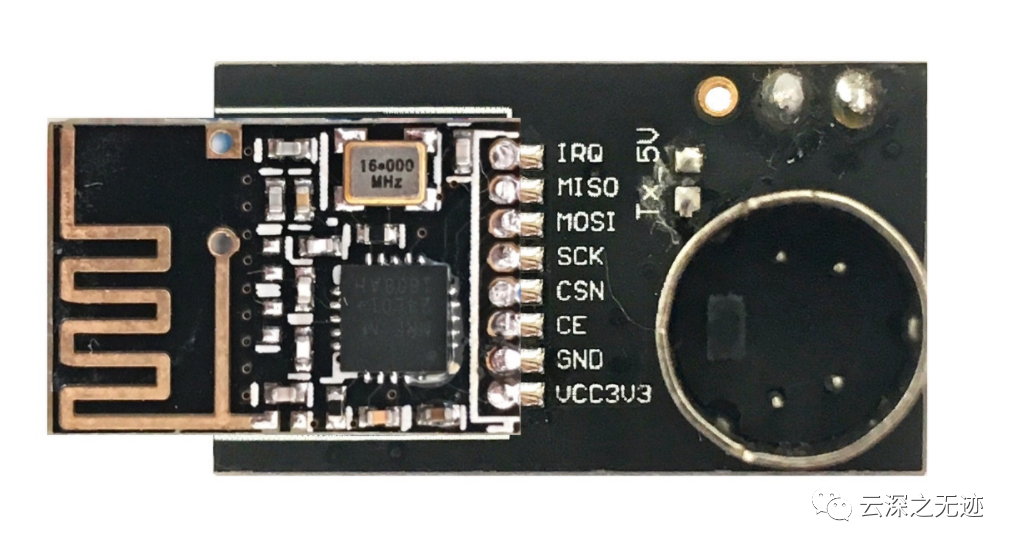
一开始都是这样的,包括是上图也是
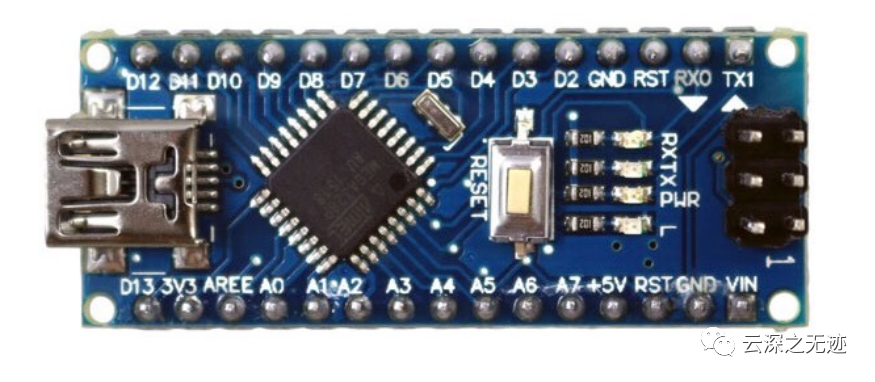
这里是使用一个Arduino uno
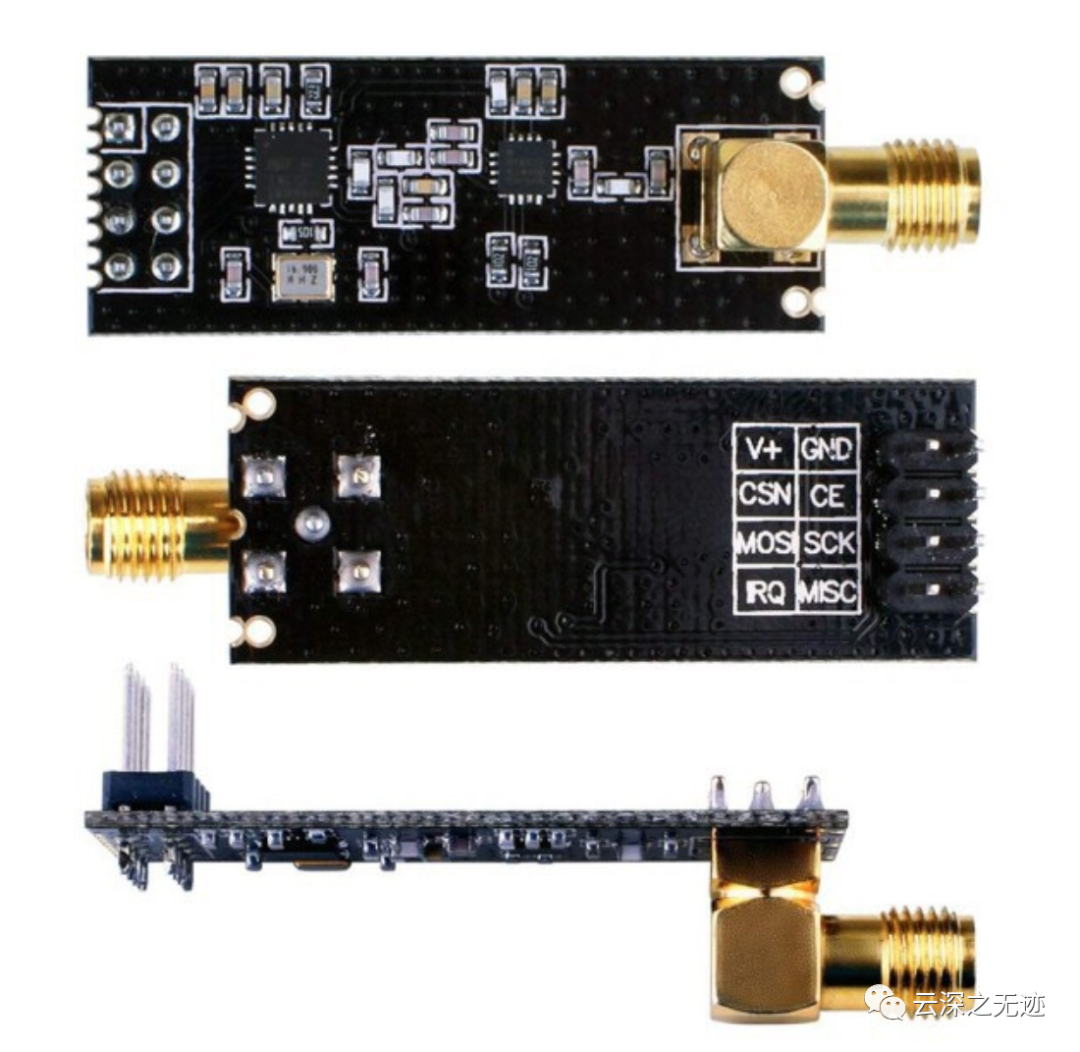
NRF23L01+PA+LNA 射频模块

加一个供电模块
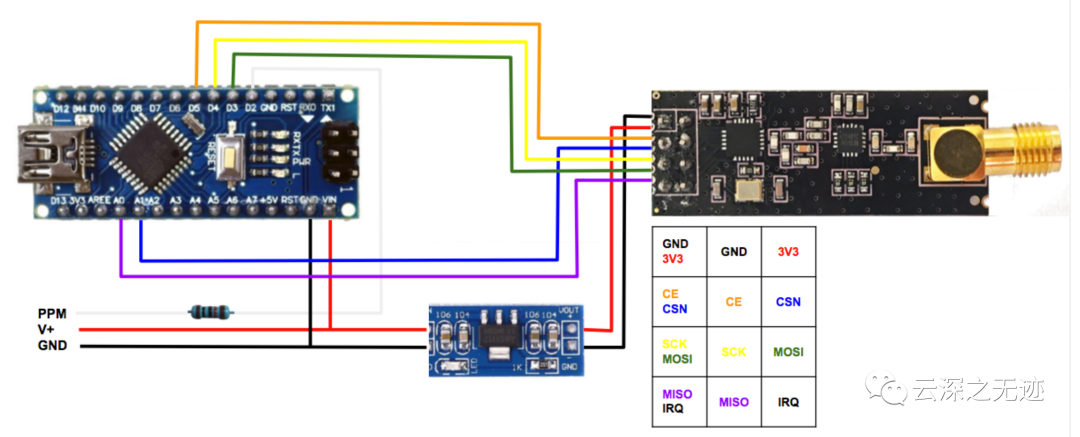
连线图
软件要完成的事情
英文

便宜的遥控器(过几天买一个)
如果觉得上面的不爽,你可以可以飞控的固件源码
自己再解析的看(我准备这样做)

当然你也可以买这个遥控器直接连接飞行,230元
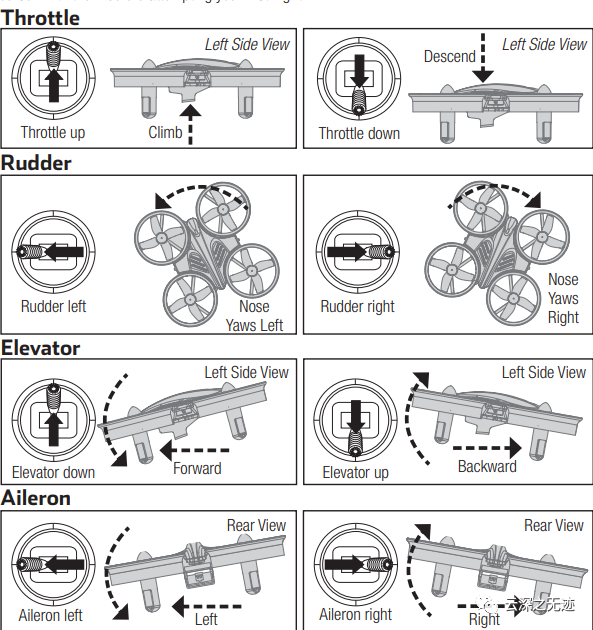
找到一张说明图,感觉还不错
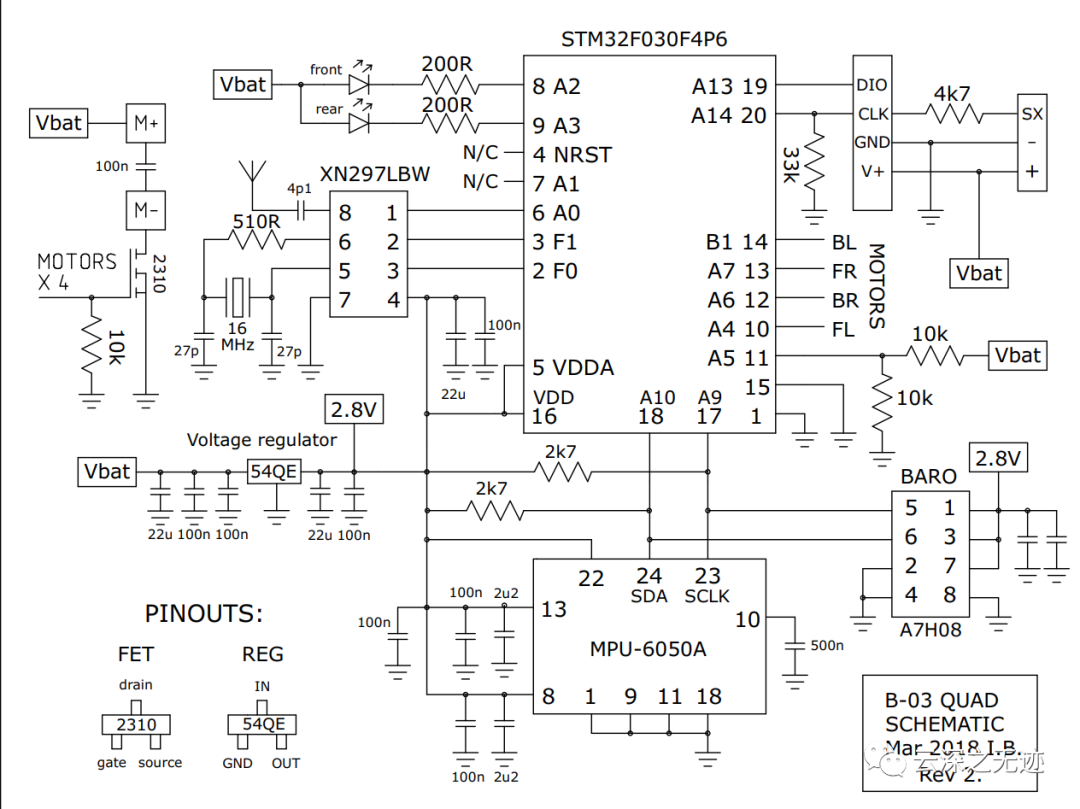
我是最靓的仔,把原理图也搞来了

B站有个人也用这个,看看组装的样子
杂记:
半自稳的意思是,平时小杆量的时候是自稳状态,大动作打杆的话变成类似手动的效果,用在这个空心杯上可以简单理解成能够做翻滚动作的自稳模式就行
Bayang协议还支持回传数据,在控上能看到接收情况和电池电压,自稳模式非常好飞,手动也不错。
产品规格
CPU:STM32F030六轴:MPU6050ESC:所有FET的最大额定值为12A 支持6x15mm / 7x20mm / 8x20mm / 8.5x20mm等电机
