

点击蓝字 关注我们
当前的自动驾驶和辅助驾驶系统中,激光雷达和毫米波雷达等传感器已经屡见不鲜,但图像传感器主攻的摄像头视觉系统依然未被任何一家车厂抛弃。反观特斯拉,更是一直坚持纯视觉方案。那么图像传感器究竟有何优势,又是如何解决自动驾驶带来的挑战的?
不同位置的汽车图像传感器
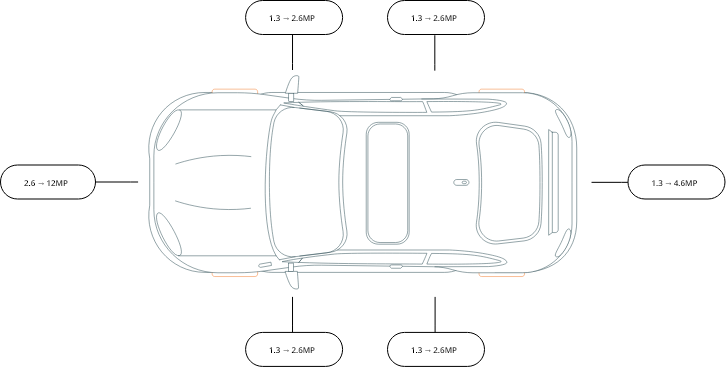
车身上不同位置的图像传感器
单从传感器数量上来看,图像传感器无疑是ADAS和AD应用中用在车身上最多的传感器,遍布车身各个位置。但在像素、动态范围等参数上,这些图像传感器往往不会统一,那么它们的位置是如何决定其配置的呢?
安森美(onsemi)中国汽车市场现场应用经理陈力答道,远距离摄像头例如前视/后视,要求高灵敏度,高动态范围,抑制LED闪烁和高像素数,以满足长距离小障碍物探测需要,目前常用8百万像素;而近距离摄像头例如环视,要求高灵敏度,中等动态范围和中等像素数,主要探测车身周围的场景,目前常用到2~3百万像素;如果是抓拍高速运动场景的摄像头,则需要考虑采用全局快门图像传感器。
▲安森美中国汽车市场现场应用经理陈力
除了车外用于ADAS和AD的图像传感器外,用于环视和监控的传统摄像头应用也要用到图像传感器,但它们的参数需求同样存在差异。环视摄像头为人眼视觉+低速应用,ADAS是机器视觉+高速应用。后者强调传感器的功能安全,低照性能,动态范围,空间解析力和抗LED闪烁功能要求。
车内监控也分驾驶员监控(DMS)和乘客监控(OMS),出于安全考虑,欧盟和中国均出台了相关政策,强制要求部分商用车型中装配DMS系统。OMS系统虽然面世不算久,但在安全带检测、车内乘客滞留提醒等应用上同样起到至关重要的作用。这两大车内监控系统中,DMS侧重于机器视觉,需要时刻关注驾驶员的状态,因此往往用到黑白的全局快门图像传感器。而OMS则侧重于记录功能,可用彩色或RGB-IR的滚动快门传感器。
LED闪烁问题如何抑制
汽车图像传感器最常见的挑战之一就是LED闪烁抑制(LFM),就像人眼对于LED屏幕的闪烁的感知一样,如今的手机常常用到DC调光和PWM的方案。而汽车图像传感器就像是车上的眼睛,对车外的LED光线同样会有所感应,那么汽车图像传感器又是如何解决LFM问题,改变车灯的频率有没有可能改善LED闪烁呢?
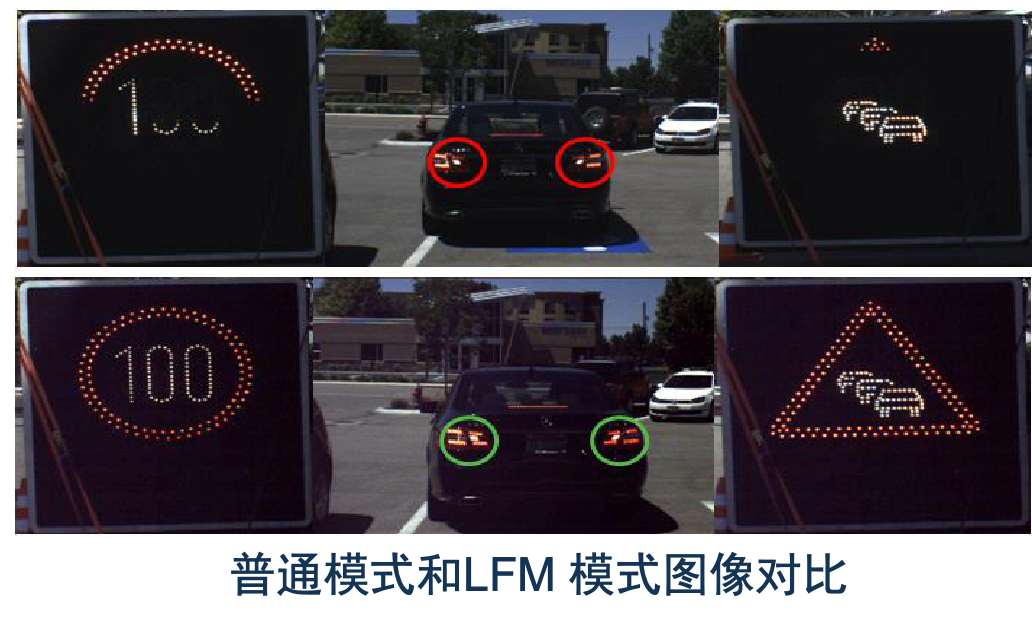
有无LFM的对比
陈力给出了这一问题的解释:采用DC调光方式的LED没有闪烁的问题,此时LED一直常亮,仅通过调幅来调节亮度,整个过程中灯并没有熄灭的状态;而另外一种更常见的LED灯是PWM调频驱动方式,即以一种一明一暗的光脉冲方式在照明,脉冲闪烁频率从几十到几百赫兹都有可能,这种闪烁是照明场景客观存在的现象,虽然人眼通常看不到,但能被图像传感器所感知。从某种角度来说,图像传感器输出的结果更客观真实,而眼睛反倒欺骗了你。
光脉冲的闪烁频率取决于PWM频率,其亮度取决于占空比,不同LED灯通常频率也不同。抑制LED闪烁常见的方法是增大曝光时间,曝光时间越长,每行像素能抓到更多光脉冲,从而削弱了闪烁的强度,但曝光时间越长,带来的运动模糊也越明显。同理,增加LED灯的频率也可以减小LED闪烁,但LED灯频率往往不可控,实际场景中,LED闪烁不仅仅出现在车灯上,环境中的LED照明都存在类似闪烁,例如信号灯,广告灯等等。
高动态范围(HDR)和超级曝光
动态范围在汽车图像传感器上有着非常高的要求,真实世界场景下的动态范围极端情况下可以达到140 dB,所以这类产品往往都要做到120 dB以上,目前传统HDR采用的多重曝光合并方式会产生高速运动伪影的现象,这对ADAS应用中的算法提出了一定要求。
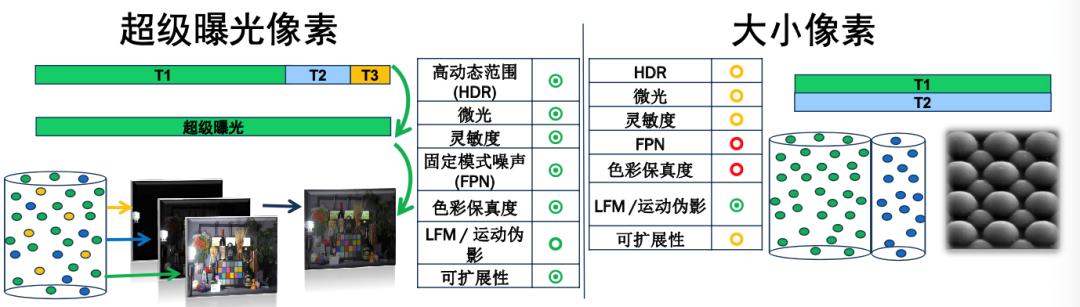
超级曝光像素与大小像素的对比
为了解决同时做到LFM和HDR又能保证成像质量的挑战,安森美的Hayabusa系列汽车图像传感器采用了超级曝光像素的技术。通过扩展像素容量,可以做到长时间曝光捕捉脉冲光而不会过饱和,并将动态范围扩展至线性像素容量的5倍。Hayabusa只需单次曝光就能在兼顾LFM的情况下实现95 dB的动态范围。
陈力提到,在多次曝光合并技术基础上,传统像素需要3次曝光来实现120 dB的动态范围,而Hayabusa只需要两次曝光合并就可以实现120 dB的动态范围,大大改善了运动伪影问题。与大小像素技术相比,超级曝光没有两种像素结构带来的巨大的光学设计挑战,即边缘像素性能急剧恶化和严重的像素间串扰,也不会因为校准和去噪而导致细节与分辨率的损失。
结语
面对其他高性能传感器的竞争,图像传感器凭借其成本、大小等优势依然牢牢占据着汽车市场。这一视觉方案凭借LFM和HDR等特性,以及超级曝光等技术的创新,依然在其弱项上进行突破,适配更多的驾驶场景。


点击阅读原文,了解更多
