原文:MakerInChina.cn
使用ESP-IDF开发方式控制RGB LED灯。
目录 [显示]
RGB LED的三个控制引脚分别连接ESP32开发板的12、14、27号引脚,简图如下:

本次要实现如下LED灯光效果:红绿蓝分别闪烁三次->红色呼吸灯->绿色呼吸灯->蓝色呼吸灯->黄色显示最亮、一半亮、最弱亮度。
(1)在VSCode中,使用ESP32插件新建项目rgbLED;
(2)在主程序文件中添加如下代码:
#include "driver/ledc.h"
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#define LED_RED_CH LEDC_CHANNEL_0
#define LED_GREEN_CH LEDC_CHANNEL_1
#define LED_BLUE_CH LEDC_CHANNEL_2
#define LED_RED_PIN 27
#define LED_GREEN_PIN 14
#define LED_BLUE_PIN 12
void ledc_init()
{
ledc_timer_config_t ledc_timer = {
.speed_mode = LEDC_LOW_SPEED_MODE,
.timer_num = LEDC_TIMER_0,
.duty_resolution = LEDC_TIMER_13_BIT,
.freq_hz = 5000,
.clk_cfg = LEDC_AUTO_CLK
};
ESP_ERROR_CHECK(ledc_timer_config(&ledc_timer));
ledc_channel_config_t ledc_red_chan = {
.speed_mode = LEDC_LOW_SPEED_MODE,
.channel = LED_RED_CH,
.timer_sel = LEDC_TIMER_0,
.intr_type = LEDC_INTR_DISABLE,
.gpio_num = LED_RED_PIN,
.duty = 0,
.hpoint = 0
};
ESP_ERROR_CHECK(ledc_channel_config(&ledc_red_chan));
ledc_channel_config_t ledc_green_chan = {
.speed_mode = LEDC_LOW_SPEED_MODE,
.channel = LED_GREEN_CH,
.timer_sel = LEDC_TIMER_0,
.intr_type = LEDC_INTR_DISABLE,
.gpio_num = LED_GREEN_PIN,
.duty = 0,
.hpoint = 0
};
ESP_ERROR_CHECK(ledc_channel_config(&ledc_green_chan));
ledc_channel_config_t ledc_blue_chan = {
.speed_mode = LEDC_LOW_SPEED_MODE,
.channel = LED_BLUE_CH,
.timer_sel = LEDC_TIMER_0,
.intr_type = LEDC_INTR_DISABLE,
.gpio_num = LED_BLUE_PIN,
.duty = 0,
.hpoint = 0
};
ESP_ERROR_CHECK(ledc_channel_config(&ledc_blue_chan));
ledc_fade_func_install(0);
}
void app_main(void)
{
ledc_init();
while(1){
//blink red
for(int i=0; i<3; i++){ ledc_set_duty_and_update(LEDC_LOW_SPEED_MODE,LED_RED_CH,8191,0); vTaskDelay(400/portTICK_PERIOD_MS); ledc_set_duty_and_update(LEDC_LOW_SPEED_MODE,LED_RED_CH,0,0); vTaskDelay(400/portTICK_PERIOD_MS); } //blink green for(int i=0; i<3; i++){ ledc_set_duty_and_update(LEDC_LOW_SPEED_MODE,LED_GREEN_CH,8191,0); vTaskDelay(400/portTICK_PERIOD_MS); ledc_set_duty_and_update(LEDC_LOW_SPEED_MODE,LED_GREEN_CH,0,0); vTaskDelay(400/portTICK_PERIOD_MS); } //blink blue for(int i=0; i<3; i++){ ledc_set_duty_and_update(LEDC_LOW_SPEED_MODE,LED_BLUE_CH,8191,0); vTaskDelay(400/portTICK_PERIOD_MS); ledc_set_duty_and_update(LEDC_LOW_SPEED_MODE,LED_BLUE_CH,0,0); vTaskDelay(400/portTICK_PERIOD_MS); } //fade ledc_set_fade_time_and_start(LEDC_LOW_SPEED_MODE,LED_RED_CH,8191,3000,LEDC_FADE_WAIT_DONE); ledc_set_fade_time_and_start(LEDC_LOW_SPEED_MODE,LED_RED_CH,0,3000,LEDC_FADE_WAIT_DONE); ledc_set_fade_time_and_start(LEDC_LOW_SPEED_MODE,LED_GREEN_CH,8191,3000,LEDC_FADE_WAIT_DONE); ledc_set_fade_time_and_start(LEDC_LOW_SPEED_MODE,LED_GREEN_CH,0,3000,LEDC_FADE_WAIT_DONE); ledc_set_fade_time_and_start(LEDC_LOW_SPEED_MODE,LED_BLUE_CH,8191,3000,LEDC_FADE_WAIT_DONE); ledc_set_fade_time_and_start(LEDC_LOW_SPEED_MODE,LED_BLUE_CH,0,3000,LEDC_FADE_WAIT_DONE); //yello color ledc_set_duty_and_update(LEDC_LOW_SPEED_MODE,LED_RED_CH,8191,0); ledc_set_duty_and_update(LEDC_LOW_SPEED_MODE,LED_GREEN_CH,8191,0); ledc_set_duty_and_update(LEDC_LOW_SPEED_MODE,LED_BLUE_CH,0,0); vTaskDelay(2000/portTICK_PERIOD_MS); ledc_set_duty_and_update(LEDC_LOW_SPEED_MODE,LED_RED_CH,4095,0); ledc_set_duty_and_update(LEDC_LOW_SPEED_MODE,LED_GREEN_CH,4095,0); ledc_set_duty_and_update(LEDC_LOW_SPEED_MODE,LED_BLUE_CH,0,0); vTaskDelay(2000/portTICK_PERIOD_MS); ledc_set_duty_and_update(LEDC_LOW_SPEED_MODE,LED_RED_CH,100,0); ledc_set_duty_and_update(LEDC_LOW_SPEED_MODE,LED_GREEN_CH,100,0); ledc_set_duty_and_update(LEDC_LOW_SPEED_MODE,LED_BLUE_CH,0,0); vTaskDelay(2000/portTICK_PERIOD_MS); //close ledc_stop(LEDC_LOW_SPEED_MODE,LED_RED_CH,0); ledc_stop(LEDC_LOW_SPEED_MODE,LED_GREEN_CH,0); ledc_stop(LEDC_LOW_SPEED_MODE,LED_BLUE_CH,0); vTaskDelay(1000/portTICK_PERIOD_MS); } }
(3)说明:
其配置流程为:
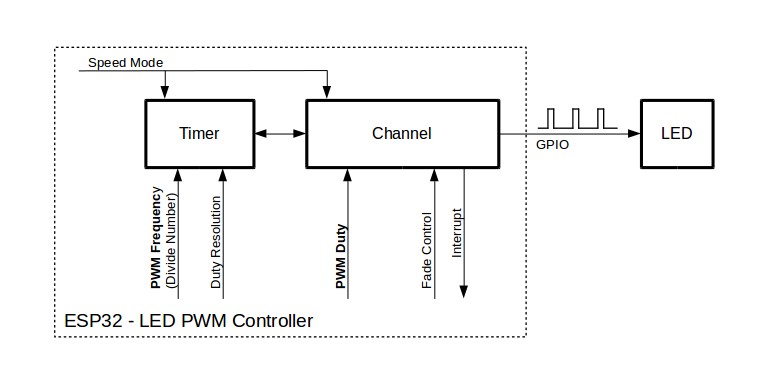
:one: 先使用 ledc_timer_config() 配置定时器,设置PWM频率和占空比分辨率;
:two: 再使用ledc_channel_config() 配置通道,将要控制的LED引脚与定时器配置的PWM相关联;
:three: 然后使用ledc_set_duty() 直接设置PWM占空比,或者ledc_set_fade_with_time逐渐改变占空比,以控制LED的亮度;
将硬件连接好,并在VSCode中,使用命令:
idf.py build flash -p COM6
进行编译并通过串口COM6烧写。
可以看到LED按照预期的效果显示。
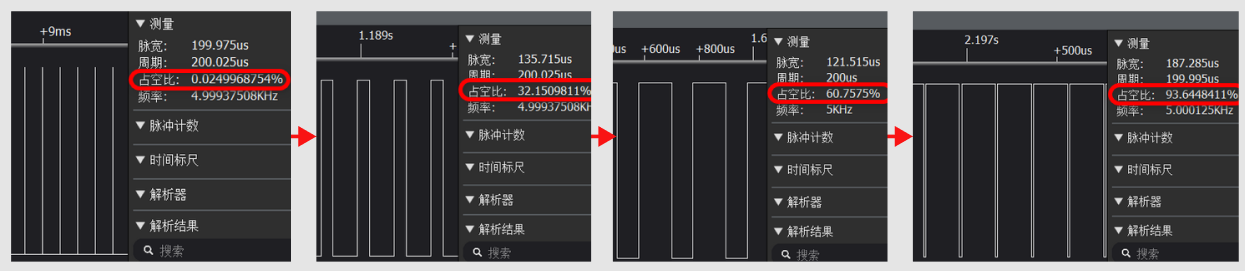
ledc_set_fade_time_and_start();该函数设置占空比逐渐增加,从0到100%,其效果如下:
视频教程:
