

关注、星标公众号,直达精彩内容

来源:网络素材
超宽带 (UWB) 是一种基于 IEEE 802.15.4a 和 802.15.4z 标准的无线电技术,可以非常准确地测量无线电信号的飞行时间,从而实现厘米精度的距离/位置测量。
所谓,IEEE 802.15.4a ,是定义 IR-UWB 物理层的国际标准。该标准旨在提供非常高精度的定位,同时提供高达 27Mbps 的同步双向通信,以收集传感器数据和控制执行器。该标准于 2005 年启动并于 2007 年获得批准,然后于 2011 年完全集成。2018 年,该标准以802.15.4z 的形式重新开放,以进一步增加物理层的安全性,因为现在预计 UWB 将用作汽车和移动行业的安全交易无线技术。
除了这种独特的功能外,UWB 还提供数据通信功能。同时使用极少的功耗——使纽扣电池运行多年而无需充电或更换。通过结合准确的定位和通信。此外,UWB 还提供了一种新的无线安全通信方式,为新形式的安全交易打开了大门。
UWB 利用飞行时间 (Time of Flight:ToF),这是一种通过将信号的飞行时间乘以光速来测量两个无线电收发器之间距离的方法。从这个基本原理出发,UWB 技术可以根据目标应用需求以不同方式实现,分别是 TWR(Two Way Ranging)、TDoA (Time Difference of Arrival) 或 PDoA(Phase Difference of Arrival )。
其中 TDoA 方法与 GPS 非常相似。多个参考点(称为锚点:anchors)部署在一个场地中并且是时间同步的。移动设备将发出信标,当“锚”接收到信标信号时,它会为其添加时间戳(timestamp)。然后将来自多个锚点的时间戳发送回中央定位引擎,该引擎将根据信标信号的到达时间差运行多点定位算法,以计算移动设备的 X、Y、Z。
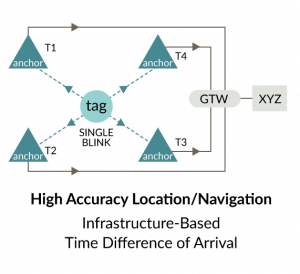
采用这种方法的优点之一是低功耗。据统计,采用这种设计的标签的电池寿命可以长达 7 年(CR2032 – 0.1Hz 更新率)。同时,还能布置非常高密度的设备(数以千计)。但这种方法还是有缺点,例如锚点需要时间同步和复杂的部署。
至于 TWR 方法,TWR 方法依赖于两个设备之间的双向通信。在进行通信时,这些设备还会测量它们之间 UWB RF 信号的飞行时间。通过将信号的往返时间乘以光速,然后除以 2,您可以得出两个设备之间的实际距离。如果在两个设备之间应用 TWR 方案,您将获得两个设备之间的距离 (D)。基于 TWR 方案,您还可以通过测量移动标签和固定信标之间的距离来实现 2D 甚至 3D 定位——这称为三角测量。

采用这种方法的有点是不需要系统同步,能够轻松部署,且双向通信使得下行数据和控制成为可能。但和另两种方法一样,TWR 也有缺点,其中一个就是功耗更高。统计显示,根据应用的不同,TWR 方法的设备电池寿命仅为数月至一年。此外,移动设备数量有限(数百个)也是其中一个缺点。
最后,PDoA 的方法将两个设备之间距离的 TWR 方案与两个设备之间方位测量的方案结合。这样的组合允许在没有任何其他基础设施的情况下计算两个设备的相对位置。为此,其中一个设备带有两个天线,能够测量射频信号的到达相位差。
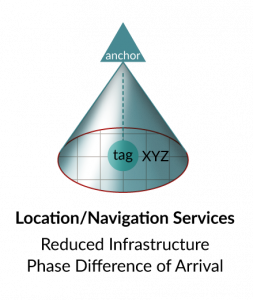
这样的方案的好处是减少基础设备位置方案和两个设备之间的相对定位。但却带来了位置误差不是长寿湖,而是两个设备之间距离的函数。
与蓝牙或 WiFi 等其他技术为新目的而重新设计不同,UWB 射频信号的物理特性从一开始就被明确定义——以实现实时、超准确、超可靠的定位和通信。
为了更好地推动 UWB 的应用,包括 Decawave、 Hyundai、Kia、Zebra、Alteros、Novelda 和 Ubisense 在内的多家企业发起了一个全球性的非营利组织 UWB Alliance ,该联盟成立的目的是致力于共同将 UWB 技术建立为开放标准行业。助于促进大规模的 UWB 部署并保护全球数百万已安装的设备免受无线电技术的侵害。该联盟将通过端到端、与供应商无关的互操作性计划推动增长,这些计划将为包括导航、跟踪、安全、成像、传感和通信在内的多个物联网应用和工业 4.0 应用提供准确的定位。
来源整理于网络素材,版权归原作者所有,如有侵权,请联系删除,谢谢。
‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧ END ‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧ 关注我的微信公众号,回复“加群”按规则加入技术交流群。

点击“阅读原文”查看更多分享,欢迎点分享、收藏、点赞、在看。
