

附录:补充材料
附1、卡尔曼滤波主要框架?
卡尔曼滤波的本质属于系统的最优估计,通过卡尔曼增益来修正状态预测值,减小噪声信号对测试精度的影响,其核心内容是基于上一时刻状态的估计值以及当前状态的观测值,给出当前状态的最优估计,该算法涉及的核心方程有:
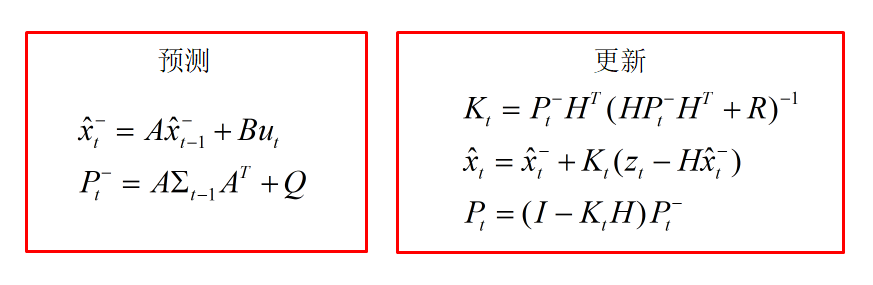
其中,xt为系统状态矩阵;zt为系统观测矩阵(实验结果);A为状态转移矩阵;B为控制输入矩阵;H为状态观测矩阵。
附2、卡尔曼滤波应用实例?
本部分通过简单的算例,介绍了卡尔曼滤波的应用场景,后续针对课题组实际需求,编写了能够应用于大应变传感器的滤波程序,具体如下所示:
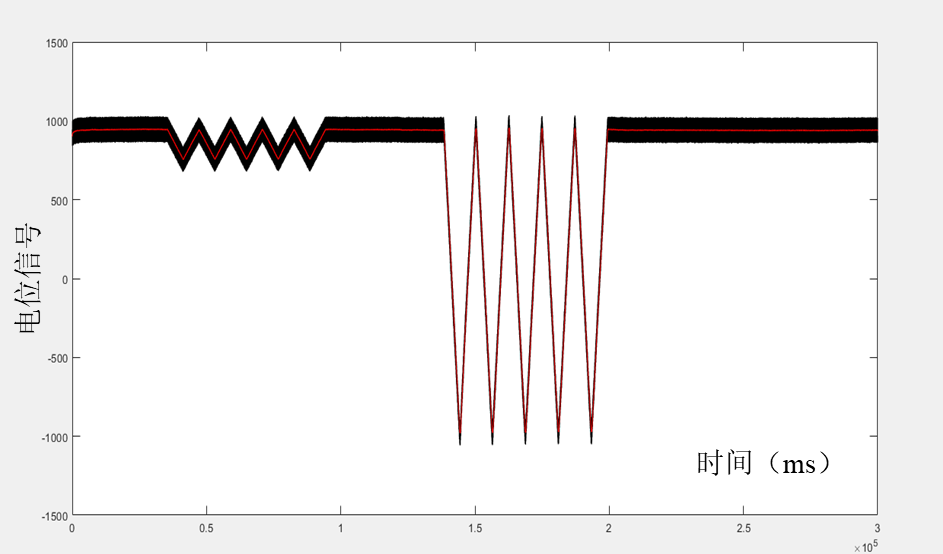
上图中黑线表述为信号采集系统得到的原始信号,红线表述为卡尔曼滤波后展现的信号特征;从图中可以看出,卡尔曼滤波能够有效地减小测量误差;其中,状态转换矩阵A=1,具体物理意义为:传感器输出信号只与应变量相关,不施加外界激励时,输出信号不发生改变;状态观测矩阵H=1,具体物理意义为:传感器输出的信号能够直接测量;
具体使用的源程序代码如下:
clear all;clc先对不同变量进行定义Q为过程激励噪声协方差R为观测噪声协方差X_bar为先验证估计Xbar为后验估计,最优估计值P_为先验估计误差协方差P为后验估计误差协方差Z为测量结果,测量数据(实验结果)K为卡尔曼增益% 核心代码% 读取传感器输出信号node='信号采集结果.txt';[x,Z]...=textread(node,'%f%f','emptyvalue',0,'headerlines',10);% 定义超参数:实验数据长度,过程激励噪声协方差,观测噪声协方差(测量设备性能参数)changdu=length(Z);Q=0.04;R=100.25;% 定义尺寸参数cicun=[changdu,1];% 实验数据Z=24+sqrt(R)*randn(cicun);% 定义初始迭代参数X_bar=zeros(cicun);Xbar=zeros(cicun);K=zeros(cicun);P_=zeros(cicun);P=zeros(cicun);P(1)=1;Xbar(1)=900.3;% 卡尔曼滤波参数更新for n=2:changdu更新先验估计X_bar(n)=Xbar(n-1);更新先验估计误差协方差P_(n)=P(n-1)+Q;状态更新K(n)=P_(n)/(P_(n)+R);Xbar(n)=X_bar(n)+K(n)*(Z(n)-X_bar(n));P(n)=(1-K(n))*P_(n);end% 绘图plot(Z,'K+')hold onplot(Xbar,'r-')hold on

免责声明:本文版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请第一时间告知,我们将根据您提供的证明材料确认版权并按国家标准支付稿酬或立即删除内容!本文内容为原作者观点,并不代表本公众号赞同其观点和对其真实性负责。


为您发布产品,请点击“阅读原文”

