


来源:平行机器人
整理:李肖遥
我们都知道卫星信号在室内会被严重影响,从而导致GPS或是北斗无法定位。所以在室内定位主要采用无线通讯、基站定位、惯导定位等多种技术集成形成一套室内位置定位系统,从而实现对人员、物体等在室内空间中的位置监控。除了通讯网络的蜂窝定位技术外,常见的室内无线定位技术还有:Wi-Fi、蓝牙、红外线、超宽带、RFID、ZigBee和超声波,今天我们就来谈谈UWB(超宽带)定位原理。
UWB是什么?
UWB(Ultra Wideband)超宽带技术是一种全新的、与传统通信技术有极大差异的通信新技术。它不需要使用传统通信体制中的载波,而是通过发送和接收具有纳秒或纳秒级以下的极窄脉冲来传输数据,从而具有GHz量级的带宽。
UWB与传统的窄带系统相比有什么区别?
超宽带系统与传统的窄带系统相比,具有穿透力强、功耗低、抗多径效果好、安全性高、系统复杂度低、能提供精确定位精度等优点。因此,超宽带技术可以应用于室内静止或者移动物体以及人的定位跟踪与导航,且能提供十分精确的定位精度。
UWB的测距原理
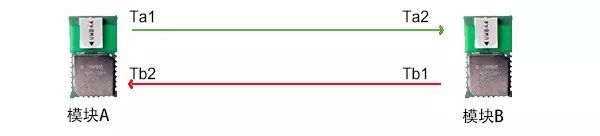
双向飞行时间法(TW-TOF,two way-time of flight)每个模块从启动开始即会生成一条独立的时间戳 。模块A的发射机在其时间戳上的Ta1时刻发射请求性质的脉冲信号,模块B在Tb1时刻发射一个响应性质的信号,被模块A在自己的时间戳Tb2时刻接收。由次可以计算出脉冲信号在两个模块之间的飞行时间,从而确定飞行距离S。S=Cx[(Tb2-Ta1)-(Tb1-Ta2)](C为光速)
TOF测距方法属于双向测距技术,它主要利用信号在两个异步收发机(Transceiver)之间飞行时间来测量节点间的距离。因为在视距视线环境下,基于TOF测距方法是随距离呈线性关系,所以结果会更加精准。我们将发送端发出的数据包和接收回应的时间间记为TTOT,接收端收到数据包和发出回应的时间间隔记为TTAT,那么数据包在空中单向飞行的时间TTOF可以计算为:TTOF=(TTOT-TTAT)/2
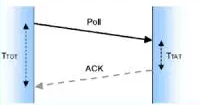
然后根据TTOF与电磁波传播速度的乘积便可计算出两点间的距离D=CxTTOF
TOF测距方法和两个关键侧约束:
1、发送设备和接收设备必须始终同步
2、接收设备提供信号的传输时间的长短
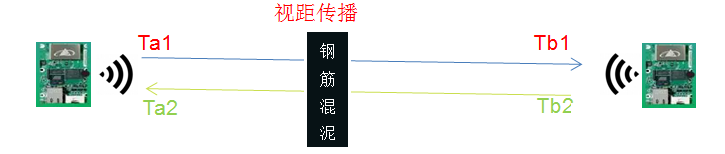
为了实现时钟同步,TOF测距方法采用了时钟偏移量来解决时钟同步问题。但由于TOF测距方法的时间依赖于本地和远程节点,测距精度容易受两端节点中时钟偏移量的影响。为了减少此类错误的影响,这里采用反向测量方法,即远程节点发送数据包,本地节点接收数据包,并自动响应,通过平均在正向和反向所得的平均值,减少对任何时钟偏移量的影响,从而减少测距误差。
UWB的定位原理
知道了UWB的测距原理,再来了解UWB的室内定位原理就很容易了。UWB的室内定位功能和卫星原理很相似,就是通过室内布置4个已知坐标的定位基站,需要定位的人员或设备携带定位标签,标签按照一定的频率发傻脉冲,不断和4个已知位置的基站进行测距,通过一定的精确算法定出标签的位置!

遮挡对UWB室内定位的影响
遮挡主要指室内定位UWB基站和定位标签之间存在障碍物,阻碍了信号直接被互相接收,从而影响定位。
遮挡对UWB定位的影响主要分以下几种情形:
1、实体墙:一堵实体墙的这种遮挡将使得UWB信号衰减60-70%定位精度误差上升30厘米左右,两睹或者两睹以上的实体墙遮挡,将使得UWB无法定位。
2、钢板:钢铁对UWB脉冲信号吸收很严重,将使得UWB无法定位。
3、玻璃:玻璃遮挡对UWB定位精度没太大影响。
4、木板或纸板:一般厚度10厘米左右的木板或纸板对UWB定位精度没太大影响。
5、电线杆或树木:电线杆或者树木遮挡时需要看他们之间距离基站或者标签的距离,和基站和标签的相对距离比较是否很小,比如,基站和定位标签距离50米,电线杆或者树木正好在两者中间,25米处,这种遮挡就无大的影响,如离基站或者标签距离很近小于1米,影响就很大。
来源整理于网络素材,版权归原作者所有,如有侵权,请联系删除,谢谢。
‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧ END ‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧ 关注我的微信公众号,回复“加群”按规则加入技术交流群。

点击“阅读原文”查看更多分享,欢迎点分享、收藏、点赞、在看。
