
[导读] 大家好,我是逸珺。
前面聊了modbus的物理层,协议标准,今天来实现一下modbus-RTU,本文主要聊从设备的实现。
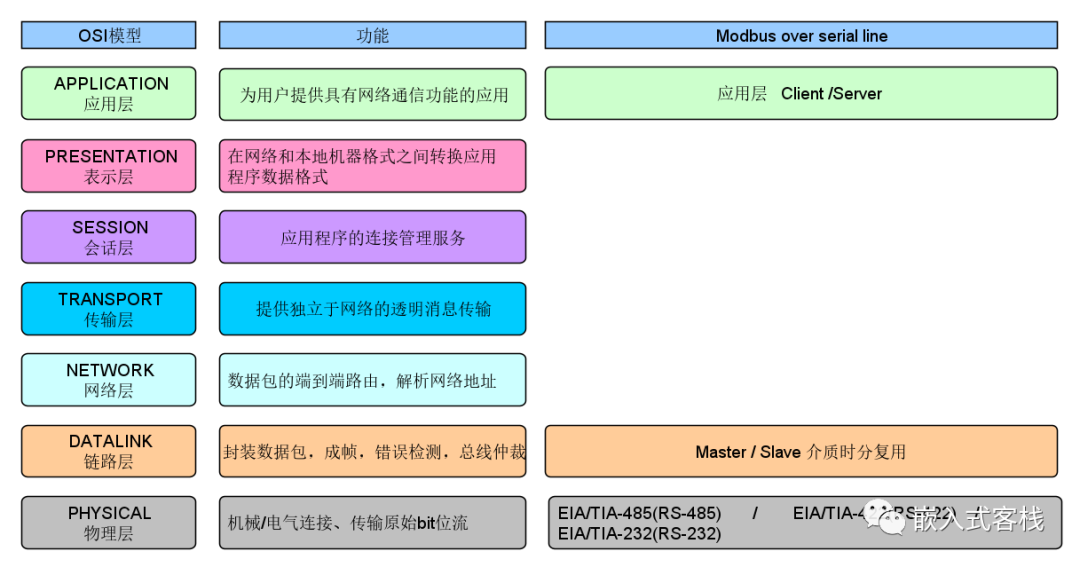
前面聊modbus协议的时候,画了这张图modbus OSI分层模型图。OSI模型图是一种分层设计图。就好比建房子,那些搞建筑的绘制的设计图一样,所以为什么建筑师也叫Architect。嗨,跑偏了。
所以编码之前,这个协议照这个图的意思就是最好设计成三层,比如这样:
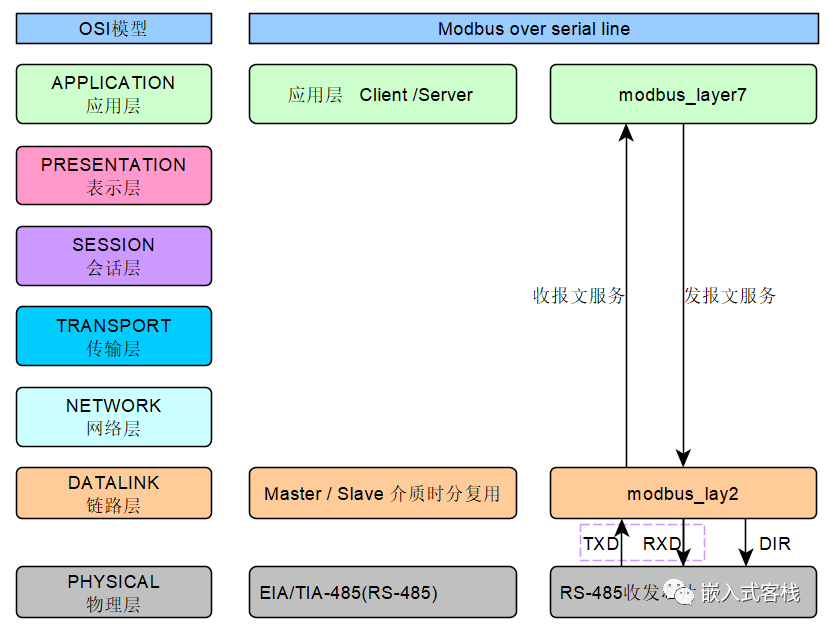
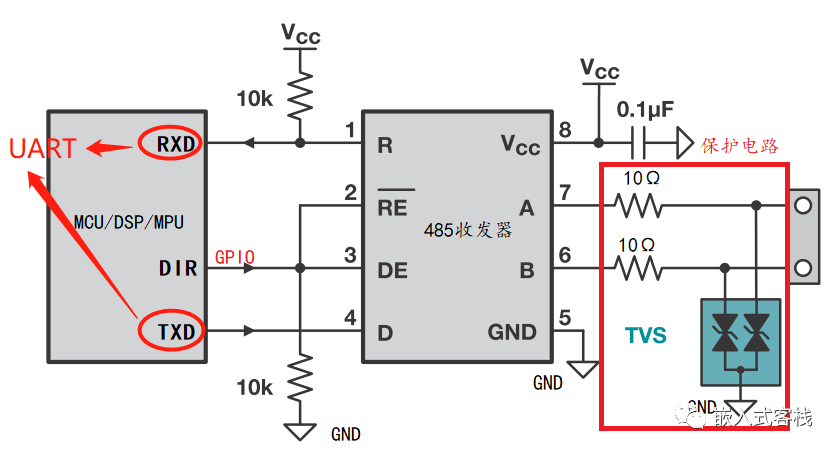
物理层与控制芯片采用UART与一个GPIO进行交互:

链路层的职责是:
报文接收服务,芯片与物理层之间通信接口是UART,因此就是处理串口接收。先看看modbus报文的定义:
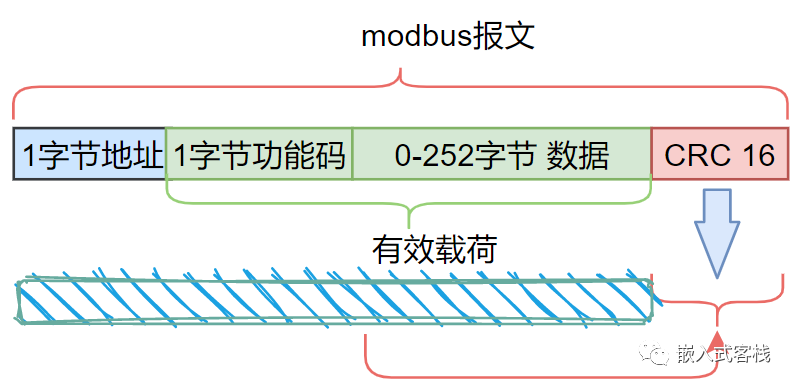
modbus报文,没有特殊帧头、帧尾,如何判别接收到一个完整的帧了呢?

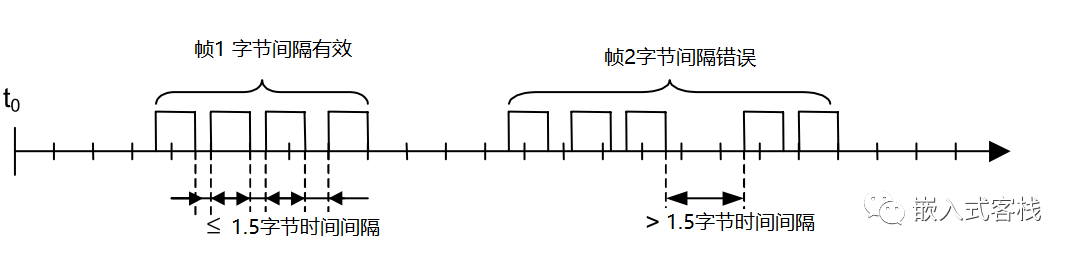
modus 标准规定,帧间隔至少须3.5个字节时间,字节间隔不得大于1.5 字节时间,那反过来思考,只要3.5 字节时间内没有新收到数据就表示有可能接收到一帧。为什么是有可能呢?因为数据里还有可能有错误字节,如果加上CRC 校验通过这个条件,就可以判定数据帧收到了。 所以在上文中才会有这么一个状态机图:
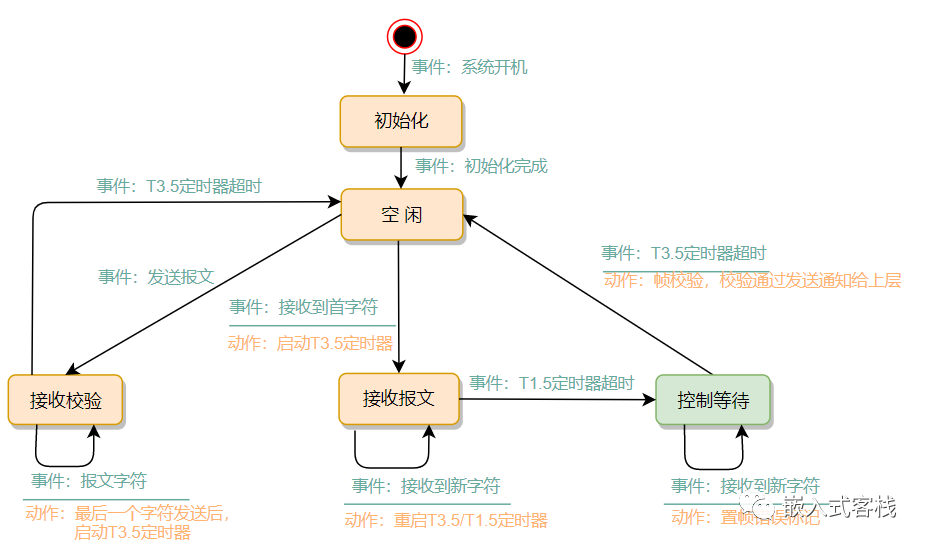
收发状态机
这里的T3.5,T1.5字节时间怎么算呢?前面说了一个字节需要11个Bit表示,所以如果波特率是9600,就按照下面计算,如果是其他的波特率计算方式一样。
用个定时器就可以实现了。
#define MODBUS_BUF_SIZE 256U
typedef enum {
E_MS_RECEVING,
E_MS_PENDING,
E_MS_SENDING
}E_MODBUS_STATE;
typedef struct _T_MODBUS_LAYER2
{
INT8U buffer[MODBUS_BUF_SIZE];
INT16U index;
INT16U txLength;
E_MODBUS_STATE state;
void (*SendDataToCom)(INT16U length);
void (*InitiliseLayer2)(void);
} T_MODBUS_LAYER2;
extern volatile T_MODBUS_LAYER2 modbusLayer2;
为突出重点,接收控制中仅实现T3.5字节时间判定,T1.5字节时间要实现也非常容易,每接收一个字节就判定一下间隔时间即可,超过1.5字节时间,丢弃所有字节,重新开始接收就可以了。
//假定用P05脚控制收发方向
sbit MODBUS_COM1_CTL = P0^5;
#define MODBUS_COM1_R_ENABLE MODBUS_COM1_CTL = 0
#define MODBUS_COM1_R_DISABLE MODBUS_COM1_CTL = 1
#define FOSC 11059200
#define TIMER_CLK 921600
#define BAUD_9600 9600
//这里实现T3.5 如果波特率可修改,这里需要调整
#define COM1_T35_GAP_TIME ( (INT16U)(65536-(TIMER_CLK*10*3.5/BAUD_9600) ) )
void ModbusCom1StartGapTimer(void)
{
ET0 = 0;
TR0 = 0;
TMOD = 0X21;
CKCON = 0x00;
TH0 = (INT8U)((COM1_T35_GAP_TIME&0xff00)>>8);
TL0 = (INT8U)(COM1_T35_GAP_TIME&0x00ff);
ET0 = 1;
TR0 = 1;
}
void ModbusCom1StopGapTimer(void)
{
ET0 = 0;
TR0 = 0;
}
void ModbusCom1InitLayer2_SRV(void)
{
MODBUS_COM1_R_DISABLE;
ModbusCom1InitUart((INT16U)BAUD_9600);
modbusLayer2.state = E_MODBUS_STATE_RECEVING;
modbusLayer2.index = 0;
modbusLayer2.txLength = 0;
modbusLayer2.SendDataToCom = ModbusCom1SendData;
modbusLayer2.InitiliseLayer2 = ModbusCom1InitLayer2;
MODBUS_COM1_R_ENABLE;
}
void ModbusCom1InitLayer2(void)
{
ES1 = 0;
MODBUS_COM1_R_DISABLE;
modbusLayer2[MODBUS_COM1].state = E_MODBUS_STATE_RECEVING;
modbusLayer2[MODBUS_COM1].index = 0;
modbusLayer2[MODBUS_COM1].txLength = 0;
MODBUS_COM1_R_ENABLE;
TI_1 = 0;
RI_1 = 0;
ES1 = 1; // 使能串口
}
void TIMER0_INT_ISR(void) interrupt 1 using 1
{
MODBUS_COM1_R_DISABLE;
ES1 = 0;
ModbusCom1StopGapTimer();
modbusLayer2.state = E_MODBUS_STATE_PENDING;
TF0 = 0;
}
void ModbusCom1InitUart(INT16U baudrate)
{
baudrate = 9600;
T2CON &= 0XCF; // XXXX XXXX Timer 2 Control
// |||| |||+- CP/RL2 Capture/Reload Select.
// |||| ||| 0 = Auto-reloads will occur when Timer 2 overflows or
// |||| ||| a falling edge is detected on T2EX if EXEN2 = 1.
// |||| ||| 1 = Timer 2 captures when a falling edge is detected on T2EX if EXEN2 = 1.
// |||| ||+-- Counter/Timer Select.
// |||| || 0 = Timer 2 functions as a timer.
// |||| || 1 = Timer 2 will count negative transitions on the T2 pin (P1.0).
// |||| |+--- Timer 2 Run Control.
// |||| | 0 = Timer 2 is halted.
// |||| | 1 = Timer 2 is enabled.
// |||| +---- Timer 2 External Enable.
// |||| 0 = Timer 2 will ignore all external events at T2EX.
// |||| 1 = Timer 2 will capture or reload a value if a negative transition is detected on the T2EX pin.
// |||+------ Transmit Clock Flag.
// ||| 0 = Timer 1 overflow is used to Tx baud rate for USART0.
// ||| 1 = Timer 2 overflow is used to Tx baud rate for USART0.
// ||+------- Receive Clock Flag
// || 0 = Timer 1 overflow is used to Rx baud rate for USART0.
// || 1 = Timer 2 overflow is used to Rx baud rate for USART0.
// |+-------- Timer 2 External Flag.
// | A negative transition on the T2EX pin (P1.1) will cause this flag
// +--------- Timer 2 Overflow Flag.
SMOD1 = 0;
//baudrate
//T0 T1 T2 12分频 00000000
CKCON = 0x00;
// XXXX XXXX Clock Control
// |||| |+++- Stretch MOVX Select 2:0.
// |||| | 000~111= 2~9 Instruction Cycles
// |||| +---- Timer 0 Clock Select.
// |||| 0: Timer 0 uses a divide by 12 of the crystal frequency.
// |||| 1: Timer 0 uses a divide by 4 of the crystal frequency.
// |||+------ Timer 1 Clock Select.
// ||| 0: Timer 1 uses a divide by 12 of the crystal frequency
// ||| 1: Timer 1 uses a divide by 4 of the crystal frequency.
// ||+------- Timer 2 Clock Select
// || 0: Timer 2 uses a divide by 12 of the crystal frequency.
// || 1: Timer 2 uses a divide by 4 of the crystal frequency.
// ++-------- 00 reserved
TCON = 0X40;
// XXXX XXXX Timer/Counter Control
// |||| |||+- Interrupt 0 Type Select.
// |||| ||| 0: INT0 is level-triggered.
// |||| ||| 1: INT0 is edge-triggered.
// |||| ||+-- Interrupt 0 Edge Detect
// |||| || If IT0 = 1, this bit will remain set until cleared in software
// |||| || or the start of the External Interrupt 0 service routine
// |||| || If IT0 = 0, this bit will inversely reflect the state of the INT0 pin.
// |||| |+--- Interrupt 1 Type Select.
// |||| | 0: INT1 is level-triggered.
// |||| | 1: INT1 is edge-triggered.
// |||| +---- Interrupt 1 Edge Detect. similar with Interrupt 0 Edge Detect
// |||+------ Timer 0 Run Control.
// ||| 0: Timer is halted
// ||| 1: Timer is enabled.
// ||+------- Timer 0 Overflow Flag.
// || 0: No Timer 0 overflow has been detected.
// || 1: Timer 0 has overflowed its maximum count.
// |+-------- Timer 1 Run Control.
// +--------- Timer 1 Overflow Flag
SCON1 = 0x50;
// XXXX XXXX Serial Port 0 Control
// |||| |||+- Receiver Interrupt Flag
// |||| ||+-- Transmitter Interrupt Flag
// |||| |+--- 9th Received Bit State.
// |||| +---- 9th Transmission Bit State
// |||+------ Receive Enable.
// ||| 0: Serial Port 0 reception disabled.
// ||| 1: Serial Port 0 received enabled (modes 1,2,and 3).
// +++------- Serial Port 0 Mode
// 000 Synchronous 8bits 12 pCLK
// 001 Synchronous 8bits 4 pCLK
// 010 Asynchronous 10 bits,Timer 1 or 2 Baud Rate Equation
// 011 Valid Stop Required,10 bits,Timer 1 Baud Rate Equation
// 100 Asynchronous 11 bits 64 pCLK (SMOD = 0), 32 (SMOD = 1)
// 101 Asynchronous with Multiprocessor Communication.11 bits
// 110 Asynchronous 11bits Timer 1 or 2 Baud Rate Equation
// 111 Asynchronous with Multiprocessor Communication.Timer 1 or 2 Baud Rate Equation
//0010(T1) 0001(T0)
TMOD = 0X21;
//9600 8 N 1 BAUD=256-FOSC/384*BAUDRATE
TH1 = 253;
P1DDRL = 0x71;
//interrupt
TI_1 = 0;
RI_1 = 0;
TR1 = 1;
TR0 = 0;
ES1 = 1;
}
void USART1_ISR(void) interrupt 7 using 2
{
if(RI_1)
{
if(modbusLayer2.state == E_MODBUS_STATE_RECEVING)
{
ModbusCom1StartGapTimer();
if(modbusLayer2.index >= MODBUS_BUF_SIZE)
{
modbusLayer2.buffer[0] = SBUF1;
modbusLayer2.index = 0;
}
else
{
modbusLayer2.buffer[modbusLayer2.index++] = SBUF1;
}
}
RI_1 = 0;
}
else if(TI_1)
{
if(modbusLayer2.state == E_MODBUS_STATE_SENDING)
{
if(modbusLayer2.index < modbusLayer2.txLength)
{
SBUF1 = modbusLayer2.buffer[modbusLayer2.index++];
}
else
{
modbusLayer2.index = 0;
modbusLayer2.txLength = 0;
modbusLayer2.state = E_MODBUS_STATE_RECEVING;
MODBUS_COM1_R_ENABLE;
}
}
TI_1 = 0;
}
}
//发送一个字节,触发发送中断。
void ModbusCom1SendData(INT16U length)
{
MODBUS_COM1_R_DISABLE;
ES1 = 1;
modbusLayer2.txLength = length;
modbusLayer2.state = E_MODBUS_STATE_SENDING;
modbusLayer2.index = 1;
SBUF1 = modbusLayer2.buffer[0];
}
这个底层是用51单片机实现的,如果是其他单片机,需要实现做些相应的修改就可以了,基本思路是一样的。
回顾之前modbus协议,标准将用户应用数据规划为4张表:

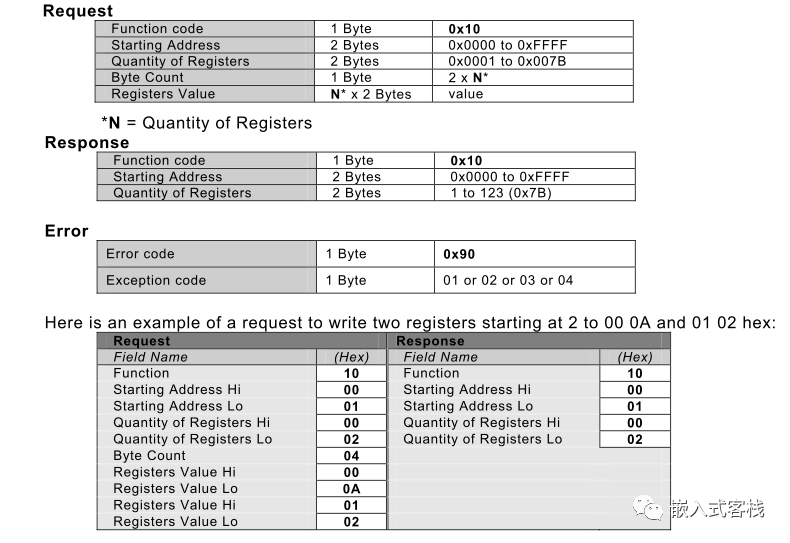
本文以最为常用的0x03、0x10命令进行示例,使用后两种表就可以了。
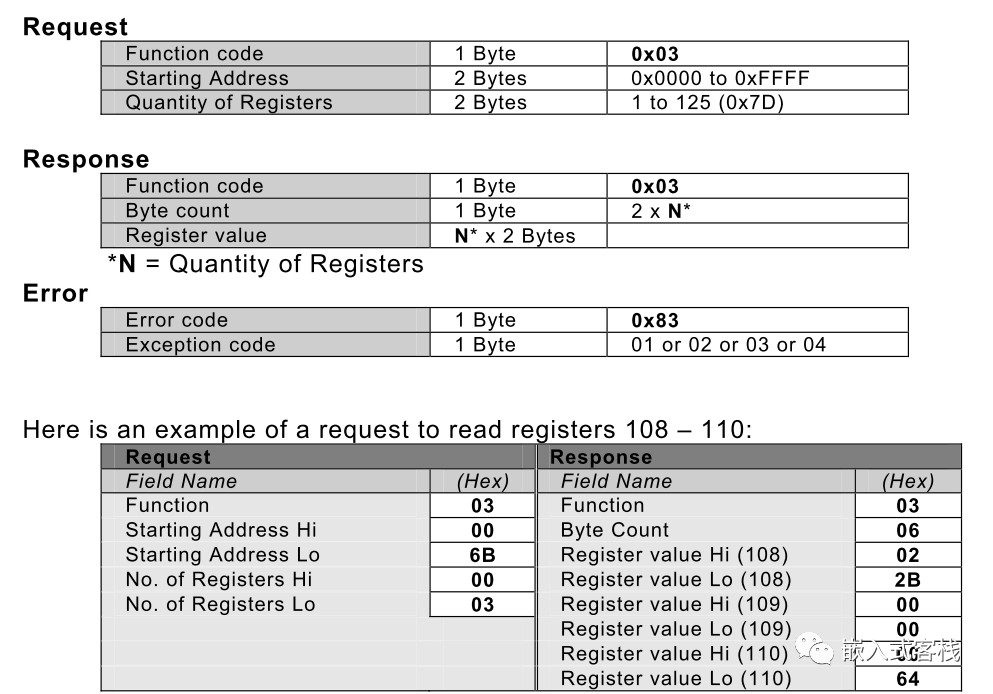
看到这两条命令,是以16位地址进行索引的,而且有需要与用户应用数据进行关联,怎么做呢?可以设计这样一个数据表:
注:这个示例是很久以前用51单片机实现的,所以int的长度是16位。
typedef unsigned char BOOLEAN;
typedef unsigned char INT8U;
typedef signed char INT8S;
typedef unsigned int INT16U;
typedef signed int INT16S;
typedef unsigned long INT32U;
typedef signed long INT32S;
typedef float FP32;
enum E_TYPES
{
ET_U8,
ET_U16,
ET_U32,
ET_FLOAT
};
typedef struct
{
INT16U address;
INT16U index;
E_TYPES type;
}MODBUS_REG_TABLE;
//输入只读寄存器
MODBUS_REG_TABLE code inputRegisterTable[]={
{10000, IDX_unit, ET_U8},
{10001, IDX_temperature, ET_FLOAT},
{10003, IDX_adc, ET_U16}
};
//保持寄存器
MODBUS_REG_TABLE code holdingRegisterTable[]={
{20000, IDX_data_4, ET_FLOAT},
{20002, IDX_data_5, ET_U8},
{20003, IDX_data_6, ET_U32}
};
enum E_IDXS
{
IDX_unit=0,
IDX_temperature,
IDX_upperRange,
IDX_lowerRange,
IDX_adc,
IDX_dac_input,
IDX_dac,
IDX_dac_upperRange,
IDX_dac_lowerRange
};
typedef struct _T_APP_DATA_TABLE
{
void *pTarget;
INT8U length;
}T_APP_DATA_TABLE;
//利用这个表,将分散的数据统一桥接映射
T_APP_DATA_TABLE code appDataTable[]={
{ &tempMeasurent.unit, 1},
{ &tempMeasurent.temperature, 4},
{ &tempMeasurent.upperRange, 4},
{ &tempMeasurent.lowerRange, 4},
{ &tempMeasurent.adc, 2},
{ &dacOutput.input, 4},
{ &dacOutput.dac, 2},
{ &dacOutput.upperRange, 4},
{ &dacOutput.lowerRange, 4}
};
typedef struct _T_MEASURE
{
INT8U unit;
FP32 temperature;
FP32 upperRange;
FP32 lowerRange;
INT16U adc;
}T_MEASURE;
typedef struct _T_DAC
{
FP32 input;
INT16U dac;
FP32 upperRange;
FP32 lowerRange;
}T_DAC;
extern T_MEASURE xdata tempMeasurent;
extern T_DAC xdata dacOutput;
为了便于描述,假定有两个应用数据结构体,一个采样当前温度传感器,计算当前温度,并根据设定上下测量范围进行映射;另一个结构体假定需要对外输出一个DA模拟量给别的设备,将输入input值,按照设定范围,用DA通道输出。这些数据在本文中并无实际意义,为了方便描述假设一下。(注:文中关键字xdata,code等为keil C51关键字。忽略即可)
将上述代码,绘制成一张图来分析一下:
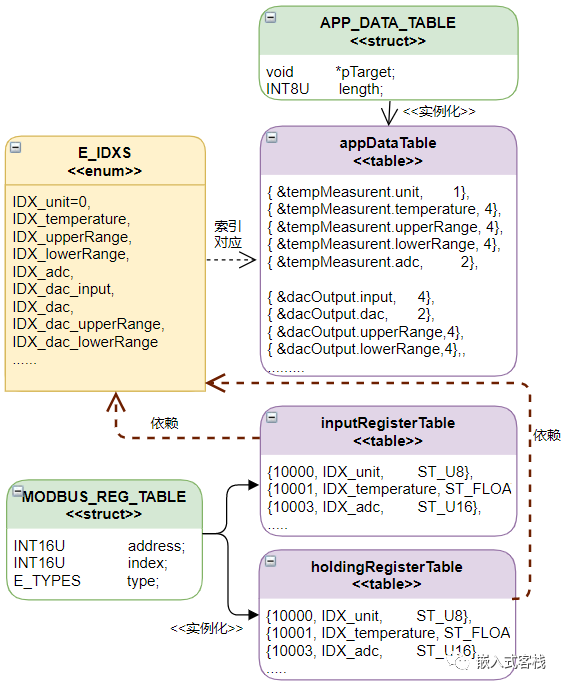
首先设计一个索引枚举E_IDXS,枚举值与appDataTable里存放的条目一一对应,appDataTable相当于一个字典,而枚举值则相对于appDataTable数组快速存取的下标。
利用T_APP_DATA_TABLE这个结构体,利用void指针,将任意类型的数据与长度抽象出来,其实这里甚至还可以放入自定义数据类型,比如某一个结构体,只要保证将结构体内存长度填对即可。我为什么这样设计这个结构体呢?因为应用层的模块可能有很多,不同的模块都会有自身的数据,利用这样一个索引字典,就将这些分散的应用数据,整合起来了。再接下来就是水到渠成的事情了,设计一个modbus寄存器表的结构体,其中第一个数据成员address,是modbus报文中的地址;第二个数据成员为index,是应用数据索引;第三个数据type,是该索引对应的数据类型。这样一来,就把modbus寄存器表与应用数据关联起来了。如此一来,要构建只读输入寄存器表,保持寄存器表,甚至什么线圈等表都变成统一模型了。
有了对数据的字典映射管理,只需要实现按寄存器表进行索引,根据不同类型的记录条目进行内存读写操作就可以了。所以需要实现两个读写接口,提供给modbus应用层访问:
static INT8U GetDataFromReg(INT8U * pBuf,INT16U startAddr,INT8U regsNum);
static INT8U StoreDataToReg(INT16U startAddr,INT8U* pBuf,INT8U regsNum,T_MODBUS_LAYER2 *pLayer2);
GetDataFromReg函数就是从寄存器表中,通过查字典,找到对应modbus地址对应的应用数据的内存地址,然后将应用数据从内存拷贝到pBuf所指向的缓冲区,这个缓冲区会进一步封装成应答报文。
StoreDataToReg函数则是从pLayer2中将接收到的报文通过传入寄存器起始地址,查询到寄存器表中的数据索引以及相应的数据类型,从而就只需要实现数据的搬运了。
这里需要注意modbus报文中,字节序是高字节在前,比如地址20000,对应16进制为0x4E20,那么在报文中0x4E先传,0x20后传。
链路层本来需要实现帧校验,由于51单片机里资源有限,而接收又采用逐字节中断方式,所以把帧校验放在应用中处理了。先看看
INT8U ModBusLayer7_Interpreter( void )
{
INT8U xdata frameCode;
if( modbusLayer2.state == E_MS_PENDING)
{
frameCode = ModBusFrameTypeCheck((T_MODBUS_LAYER2 *)&modbusLayer2,systemPara.modbusAddr);
switch( frameCode )
{
case MODBUSRTU_F03:
if(ModBusRTU_F03_Response((T_MODBUS_LAYER2 *)&modbusLayer2)!=OK)
modbusLayer2[i].InitiliseLayer2();
break;
case MODBUSRTU_F10:
if(ModBusRTU_F10_Response((T_MODBUS_LAYER2 *)&modbusLayer2)!=OK)
modbusLayer2.InitiliseLayer2();
break;
//按照这个样式还可以实现其他命令
default:
modbusLayer2.InitiliseLayer2();
break;
}
}
return( ERR );
}
INT8U ModBusRTU_F03_Response( T_MODBUS_LAYER2 *pLayer2)
{
INT8U xdata regs,bytes;
INT16U xdata regAddr,CRC16Value;
regAddr = (INT16U)(pLayer2->buffer[2]<<8)+(INT16U)pLayer2->buffer[3];
regs = (INT16U)(pLayer2->buffer[4]<<8)+(INT16U)pLayer2->buffer[5];
bytes = regs * 2;
if( bytes == 0 )
{
return( ERR );
}
if( bytes > sizeof(pLayer2->buffer) - 7 )
{
return( ERR );
}
GetDataFromReg( &pLayer2->buffer[3], regAddr, regs );
pLayer2->buffer[2] = bytes;
CRC16Value = CRC16( pLayer2->buffer, 3+bytes );
pLayer2->buffer[3+bytes] = (INT8U)( CRC16Value >> 8 );
pLayer2->buffer[4+bytes] = (INT8U)( CRC16Value );
pLayer2->SendDataToCom(5+bytes);
return OK;
}
INT8U ModBusRTU_F10_Response( T_MODBUS_LAYER2 *pLayer2 )
{
INT8U xdata bytes,regs;
INT16U xdata CRC16Value,regAddr;
regs = pLayer2->buffer[5];
bytes = pLayer2->buffer[6];
regAddr = (INT16U)(pLayer2->buffer[2]<<8)+(INT16U)(pLayer2->buffer[3]);
if( (bytes == 0) || ( bytes != (regs*2) ) )
return( ERR );
if(StoreDataToReg( regAddr, &(pLayer2->buffer[7]), regs,pLayer2)!=0)
{
pLayer2->buffer[4] = 0x90;
pLayer2->buffer[5] = 0x01;
}
CRC16Value = CRC16( pLayer2->buffer, 6 );
pLayer2->buffer[6] = ( INT8U )( CRC16Value >> 8 );
pLayer2->buffer[7] = ( INT8U )( CRC16Value );
pLayer2->SendDataToCom(8);
return OK;
}
基本思路就是,先判断layer2是否接收一个报文,然后在校验这个报文是否是一个正确的报文,如果是就先进行校验,校验返回值为命令码,再转入相应的命令进行后续处理。
帧校验,需要校验CRC-16,这个是必须要做的。除此之外,还需要检查当前请求是否为设备所支持的命令,是否是对该设备的请求。本文没有关注广播报文。CRC-16校验算法就是前文中标准给出的算法。
INT8U ModBusFrameTypeCheck( T_MODBUS_LAYER2 *pLayer2,INT8U address)
{
INT8U xdata funCode;
INT8U xdata station;
if(address!=pLayer2->buffer[0])
return ERR;
if( pLayer2->index < 8 )
return( ERR );
station = pLayer2->buffer[0];
funCode = pLayer2->buffer[1];
if(station != address)
{
return( ERR );
}
//0X03命令报文长度为8,
//0x10命令,第6个字节为寄存器字节数,
if( (pLayer2->index != 8) &&
(pLayer2->index != pLayer2->buffer[6]+9) &&
(pLayer2->index != (5+pLayer2->buffer[2])) )
return( ERR );
if( CRC16(&(pLayer2->buffer[0]), pLayer2->index) != 0 )
{
return( ERR );
}
switch( funCode )
{
case 0x03: return( MODBUSRTU_F03 );
case 0x10: return( MODBUSRTU_F10 );
default: break;
}
return( ERR );
}
很久以前用51单片机实现的modbus两条命令,要实现其他的命令或者广播处理,可以类似处理。主要聊一下整体思路。代码很多地方不是很严谨。有兴趣自己实现一下modbus命令,本文可以当个参考。
