来源 | 焉知智能汽车
智库 | 云脑智库(CloudBrain-TT)
云圈 | 进“云脑智库微信群”,请加微信:15881101905,备注研究方向
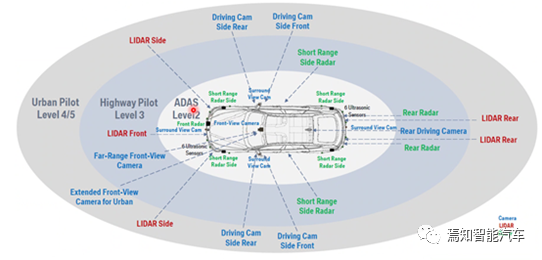
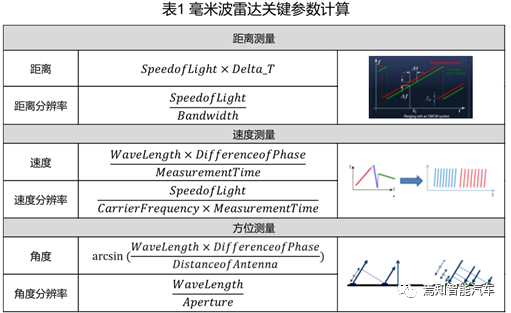
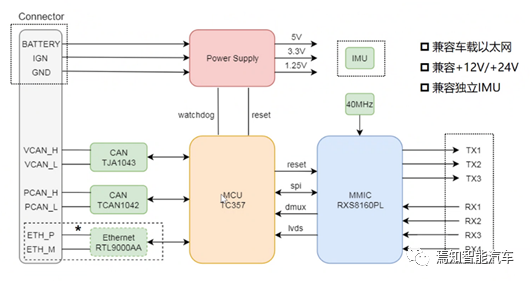
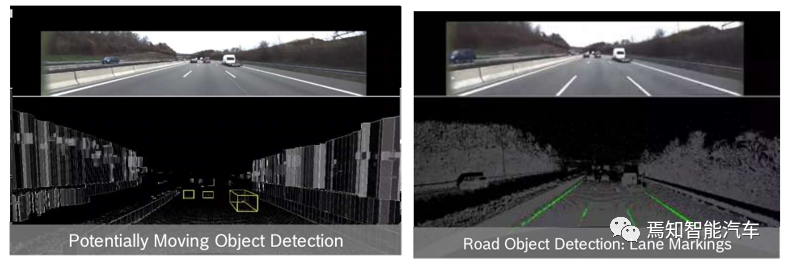
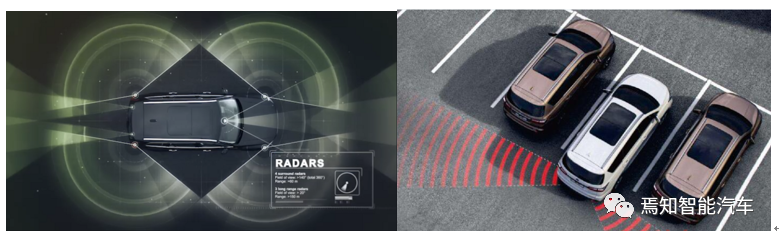
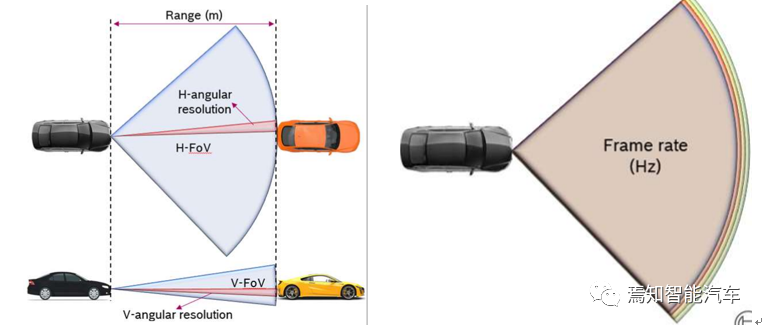
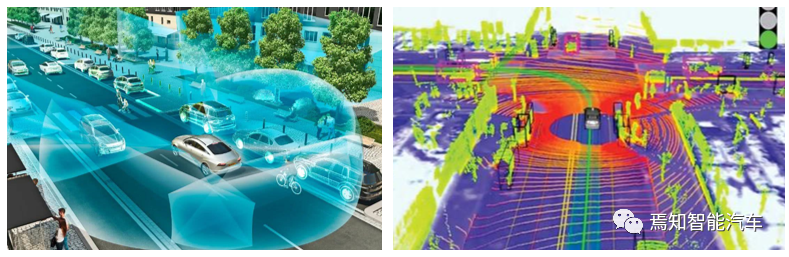
当前,主流的自动驾驶Tier1和主机厂都趋向于设计更加先进的传感器架构将传感器的探测能力提升到最大值。其中,不乏有类似特斯拉、小鹏这样趋向于推进视觉感知架构设计的主机厂,也不乏有类似博世、大陆这类传统趋向于推进雷达感知为主的供应商。也有在传感器架构中趋向于设计全传感冗余方案的主机厂,如蔚来、waymo、百度等不差钱的主机厂。从量产的角度出发,我们在设计传感架构时更多的是追求所谓的性价比,也即用最少的传感器设计最优的系统架构。1)确保传感器的探测能力能够覆盖整个车端实体及周边环境,尽量不会出现感知盲区;2)确保设计最高级自动驾驶系统时,需要充分考虑系统在某些失效情况下,其传感器能够也能做相应的降级处理;3)整个传感器布置尽量不要出项重复或探测能力的过冗余,这可能导致系统的整个经费较高,无法满足高性价比的要求。前段时间特斯拉宣布后续将会朝着全视觉方案方向发展的策略,由于当前特斯拉的方案在某种程度上仍旧采用了雷达目标的探测情况。全视觉方案旨在通过视觉探测逐渐替代有雷达探测所带来的诸如距离、速度、加速度等实体目标中的优势。但是,笔者认为全视觉方案在如下一些极端的场景中是无法满足对于感知探测能力的KPI指标的。主要体现在如下几个大的方面:1)天气环境因素造成的视觉传感器致盲(如逆光炫目、沙尘暴遮挡等);2)小目标物体在中低分辨率视觉感知系统中可能造成的目标晚识别(如减速带、小动物、锥桶等);3)异形目标由于未经训练可能造成无法匹配,最终被漏识别(道路落石、前车掉落轮胎等);4)视觉传感器本身的识别要理要求对于视觉识别结果具有较高的算力需求。从如上说明中不难看出,视觉感知能力往往无法满足性能需求。而真正实现优化的感知能力模型,必须结合毫米波雷达或激光雷达做优势互补才能实现。本文将从雷达实现原理角度触发针对性的讲解下一代自动驾驶系统使用的4D毫米波雷达结合激光雷达的所能解决的驾驶边缘场景。毫米波雷达以其距离和速度识别精度高,识别距离远,穿透力强,性能稳定,不易受天气影响,性价比高等优势,在智能驾驶领域得到了广泛应用。早期Level 2级及以下驾驶辅助功能,多采用单前向毫米波雷达方案,以及前向毫米波雷达和前视多功能摄像头融合的方案,有部分目标融合与控制算法通常集成在雷达ECU控制软件中。随着驾驶辅助功能向着Level 2+ 级及以上更高阶智能驾驶的发展,传统毫米波雷达较弱感知能力的短板凸显,极大的限制了其在智能驾驶开发过程中的应用。毫米波雷达技术经过数十年的发展,无论硬件设计加工,还是软件算法,通过长期积累,都已成为相当成熟的产品。目前具备成像能力的4D成像毫米波雷达成为了各个雷达供应商的研究重点,众多厂商也相继发布了其4D成像雷达方案。如下表示了一种典型的4D毫米波雷达内部结构图。不难看出,其采用了更高算力的芯片设计,且加装的收发天线也是传统毫米波雷达的数倍。同时可以兼容车载以太网,CANFD等大数据通信结构,其设计的独立IMU也可为后续定位建图及识别精准性矫正提供相应的支撑。对于4D成像毫米波雷达而言,其相对于传统毫米波雷达而言,具备更高空间分辨率,更远探测距离,更强目标分类能力。同时,由于其能够提供更多更高质量的点云,从而极大得扩展了毫米波的应用范围,其点云致密度为环境信息探测能力提供了高度信息。在各种天气和能见度条件下保持鲁棒性,并在方位角和仰角上都能达到1度角分辨率。总体来看,高分辨率4D毫米波雷达主要可以提供如下多方面的感知能力,从而可解决当前多方面的感知场景局限。4D毫米波雷达实现了四个维度的环境感知,包括距离、水平和垂直定位以及速度。这种感知能力我们称之为其具备多维环向感知能力。4D毫米波雷达可以通过生成的较多点云提供更多的目标识别反馈信息,从而进行有效的环境目标建模,这个过程类似于激光雷达的点云信息建模。这种打点聚类的方式,可以轻易的识别出物体的类型信息。APS这类应用,对于毫米波雷达来说是典型的短程雷达的应用。。也就是说,速度较低,探测距离较近,但对分辨率的要求较高。传统的毫米波雷达由于其检测能力的限制通常情况无法直接用于泊车场景,而4D毫米波雷达可以实现低速近距离场景下的信息有效探测和分辨,这就可以很好的将超声波雷达所生成的信息进行有效的感知识别。毫米波雷达在泊车市场中的布局已经凸显的越来越明显,有些厂家已经开始思索是否可以直接利用毫米波雷达直接代替超声波雷达进行泊车控制。特斯拉在某些车型上搭载基于毫米波雷达方案的自动泊车系统,加之小鹏以及吉利和长安等越来越多国产车企的陆续推进,相信这种APS功能竞争全面升级的态势有望加速业界在APS专用市场出现越来越多的毫米波雷达方案提供商。4D毫米波雷达又称为成像雷达。相对于传统的毫米波雷达所具有较高的速度和距离分辨率,能够很容易地识别和区分运动物体,且在静态物体上的探测能力也得到了极大的提升,可以轻松的区分横向(与车辆行驶方向垂直)移动物体的探测。4D毫米波雷达可以提供更多的点云信息,且由于点云的致密度也是相对更多,使得其对于不同的目标进行聚类的结果,可以提供包含原始横向目标的感知及分辨能力,也能提供原始纵向目标的感知及分辨能力。这一优势对于一些特殊异形车辆的感知效果无非是一大亮点。比如能够感知一些特殊货车的加长车位,并对其高度进行有效的分辨。亦或者针对交通拥堵的场景也能够很轻易的分辨出不同方位和角度的车辆信息。且其位置、速度和方位信息比摄像头识别结果好很多。4D毫米波雷达可用于低速无人驾驶场景,使用RF CMOS技术和2D的MIMO技术,可以把水平、垂直角度检测精度做得非常好。可以输出可比拟激光雷达的致密点云信息,清晰勾勒出周边建筑物轮廓,从而实现基于雷达点云的高精度定位。此外,从智能驾驶是产品设计角度说,基于Autosar架构进行设计的4D毫米波雷达其具备如下多个方面较好的产品特点:1)具备测高能力,井盖和天桥检测误报极大程度减小。这一点相对于传统摄像头来说是较大的优势的,如果从功能角度上说可以减少很多情况下的误报。2)特殊波形设计,抗干扰能力极大增强,后续加装毫米波雷达的车型将越来越多,车型之间难免会有相互干扰的情况,4D毫米波雷达因其发射波形的不同,导致其检测具备较高的分辨能力。3)4D毫米波雷达的高性能也就意味着其在功能安全设计能力得到极大提升,有些可提高至ASIL B以上。激光雷达在高性能智能驾驶中的探测优势已经在很多方面得到证实,原因是因为其通过建立数量较多的点云数据可以通过聚类实现很好的场景重建。从智能驾驶的角度上说可以通过激光雷达解决如下一些极端场景:序号 | 场景描述 | Lidar的必要性说明 | 示意图 |
1 | 路面落石、雪糕筒、快递包裹、紧急停车三角警示牌。 | 由于摄像头+毫米波的方式强烈依赖于其物体的动态变化,对于静止的小目标无法做到有效识别。 | 
|
2 | 未分类车辆或超出轮廓的异形车辆 | 摄像头无法通过其设定的Bounding Box对异形车辆进行分类。 | 
|
3 | 高速行驶或堵车场景下,旁边车道的车辆、尤其是大车在很近距离cut-in | 由于近距离状态下,摄像头只能拍摄到很小的车辆部分,毫米波雷达对近距离目标识别容易导致回拨干扰,因此无法对切入目标车辆进行有效的识别 | 
|
4 | 逆光或炫目 | 如隧道出入口导致的摄像头识别短暂性致盲 | 
|
5 | 城市森林 | 毫米波雷达存在多径反射而失效,摄像头由于反射的复杂光线复杂和目标距离过近,可能无法准确识别物体。 | 
|
6 | 道路坑洼、狭窄、道线不清晰 | 摄像头容易因为致盲导致无法识别道线等信息,道路坑洼状态暂时无法通过摄像头准确识别,道路狭窄可能导致毫米波容易存在多径效应。 |

|
从如上表的总结中不难看出,对于激光雷达所能解决的自动驾驶边缘场景是不言而喻的,纯视觉派的特斯拉方案在未来自动驾驶设计过程中是无法保证其性能和效果的。相应的提升方案肯定是结合视觉的雷达融合方案。当然本章重点还是介绍了毫米波雷达的感知原理及性能,未来如果是大域控方案的实施策略时,难免不会考虑利用毫米波输入的原始点云数据进行综合处理。这一过程类似于激光雷达的点云处理,这又涉及多方面的因素。如传输带宽,点云建模模型以及域控制器综合处理算法。在纵向感知方面,毫米波最强;横向方面,激光最强。丰田和本田的方案,都是激光作为独立感知,结果再跟摄像头融合,最后得出最终目标。- The End -
声明:欢迎转发本号原创内容,转载和摘编需经本号授权并标注原作者和信息来源为云脑智库。本公众号目前所载内容为本公众号原创、网络转载或根据非密公开性信息资料编辑整理,相关内容仅供参考及学习交流使用。由于部分文字、图片等来源于互联网,无法核实真实出处,如涉及相关争议,请跟我们联系。我们致力于保护作者知识产权或作品版权,本公众号所载内容的知识产权或作品版权归原作者所有。本公众号拥有对此声明的最终解释权。
投稿/招聘/推广/合作/入群/赞助 请加微信:15881101905,备注关键词

微群关键词:天线、射频微波、雷达通信电子战、芯片半导体、信号处理、软件无线电、测试制造、相控阵、EDA仿真、通导遥、学术前沿、知识服务、合作投资.
“阅读是一种习惯,分享是一种美德,我们是一群专业、有态度的知识传播者.”
↓↓↓ 戳“阅读原文”,加入“知识星球”,发现更多精彩内容.
/// 先别走,安排点个“赞”和“在看” 吧!↓↓↓