

点击上方“转子磁场定向”,选择“置顶/星标公众号”
前言:非线性磁链模型之前已经写过文章了,有很多朋友问增益参数怎么调,锁相环怎么取。此篇文章,通过仿真来对比一下,看看该模型的参数调试和对增益,锁相环的敏感性。
简介:非线性磁链模型之前的文章如下:
基于磁链模型的非线性观测器
仿真分析
电机参数:
非线性校正环节如下:

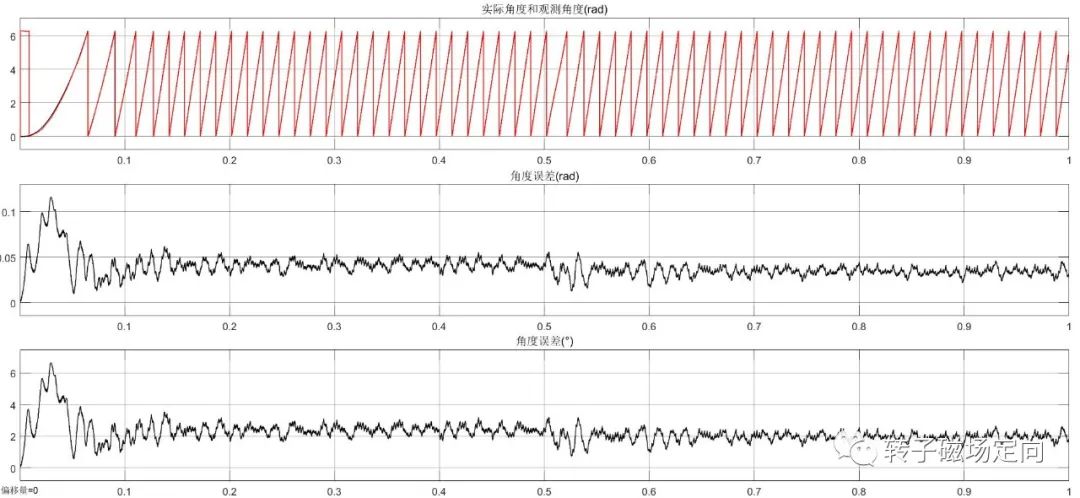
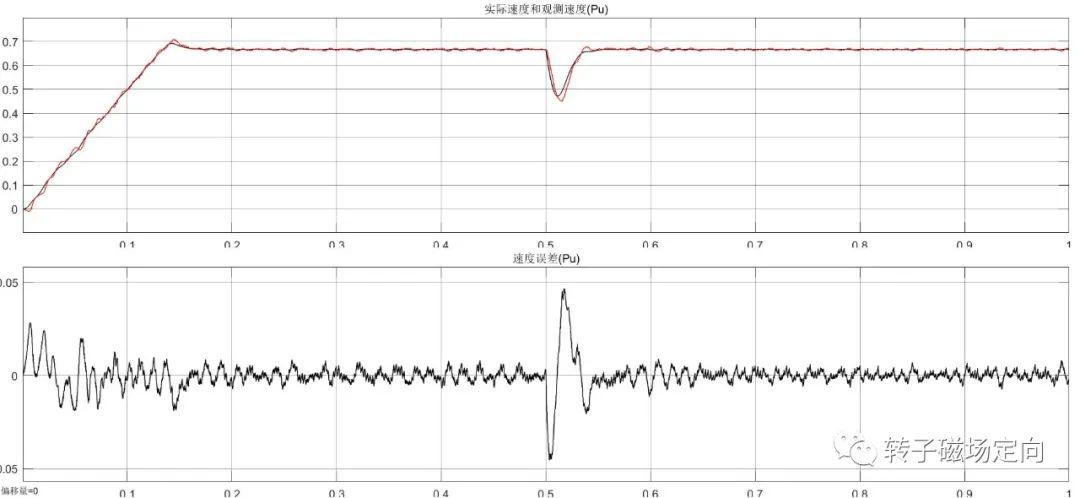
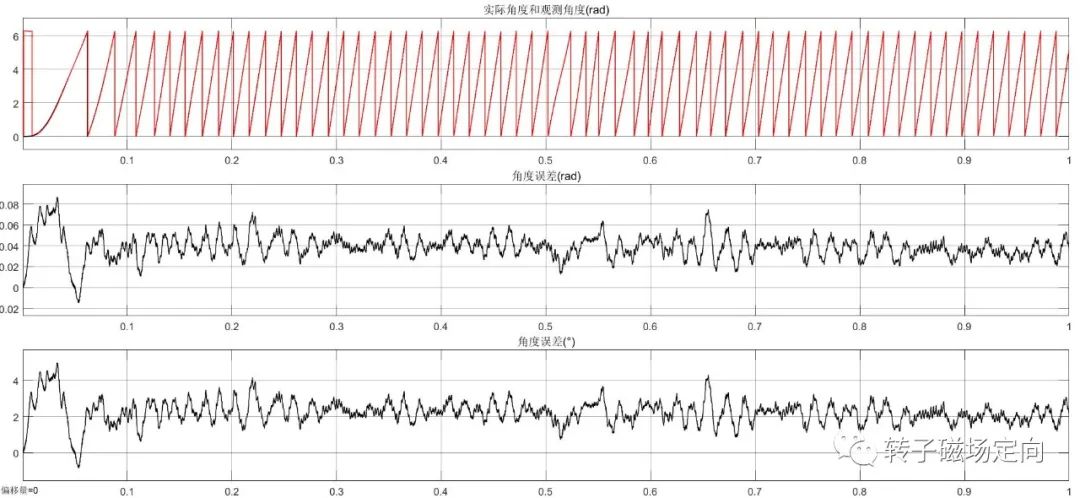
在标幺值系统下,选取锁相环PLL带宽为30Hz,选取非线性模型的增益r为1.0。从空载加速到1000rpm,然后加阶跃负载48N*m,角度误差如下:
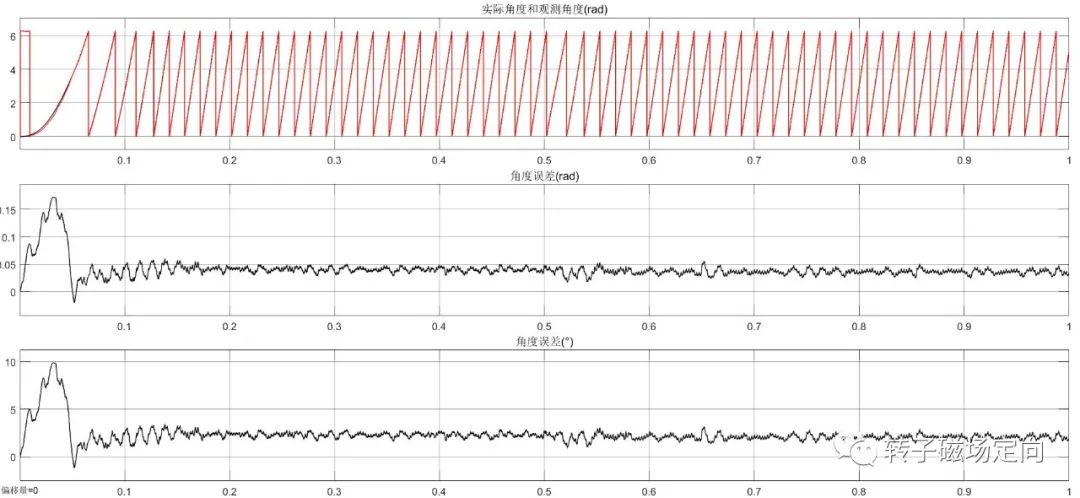
从上图看,瞬态下最大角度误差8°,稳态下大约2°。磁链模型对角度的收敛快,精度高。
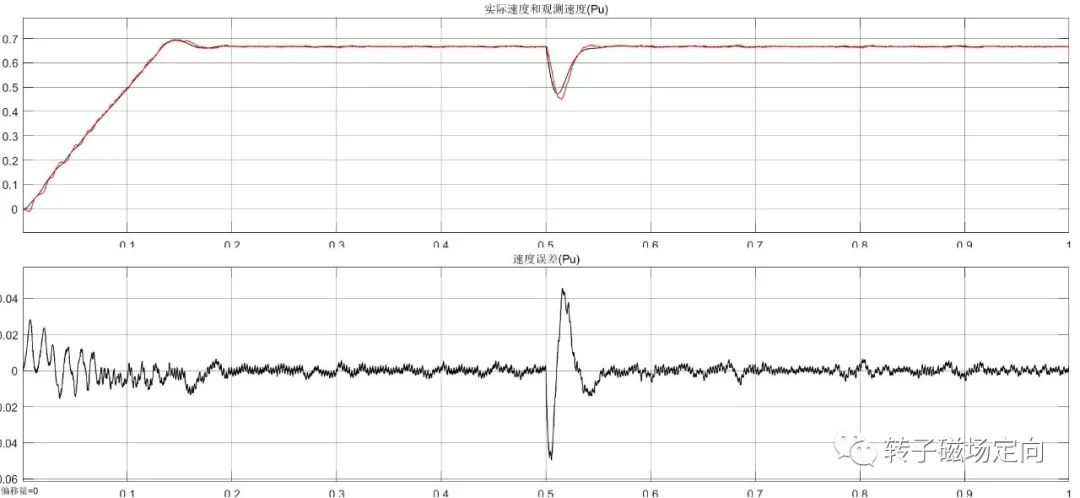
速度误差如下:
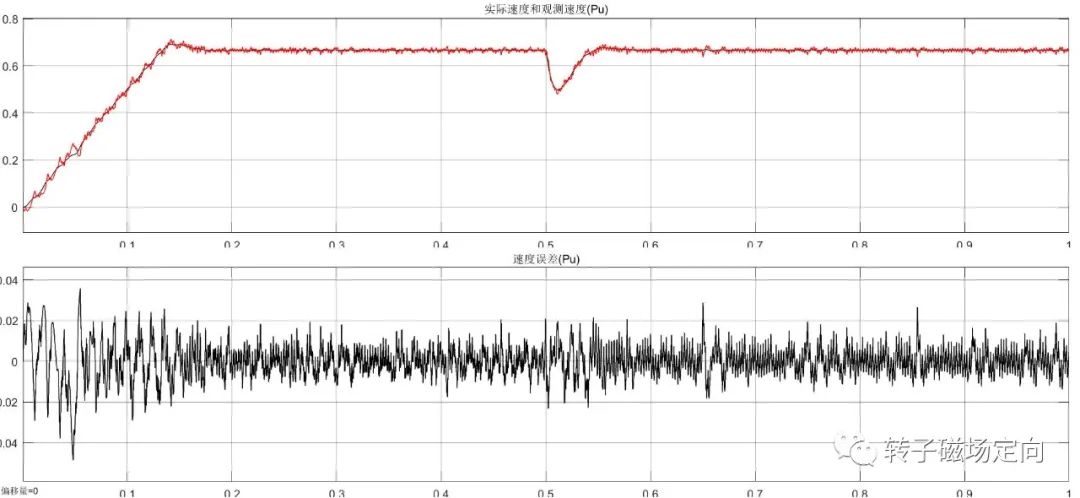
瞬态速度误差标幺值0.04,稳态大约5e-3。磁链模型的劣势在于速度的误差稍微大一些,尤其跟基于反电势的模型相比,稳态精度差一些。
给定速度和实际速度:
先空载加速,在稳态下突加阶跃负载,稳态速度精度差了一些,角度上跟踪不错。
下面PLL锁相环带宽保持30Hz,分别贴出不同非线性增益下的仿真结果:
r=10.0的角度误差:
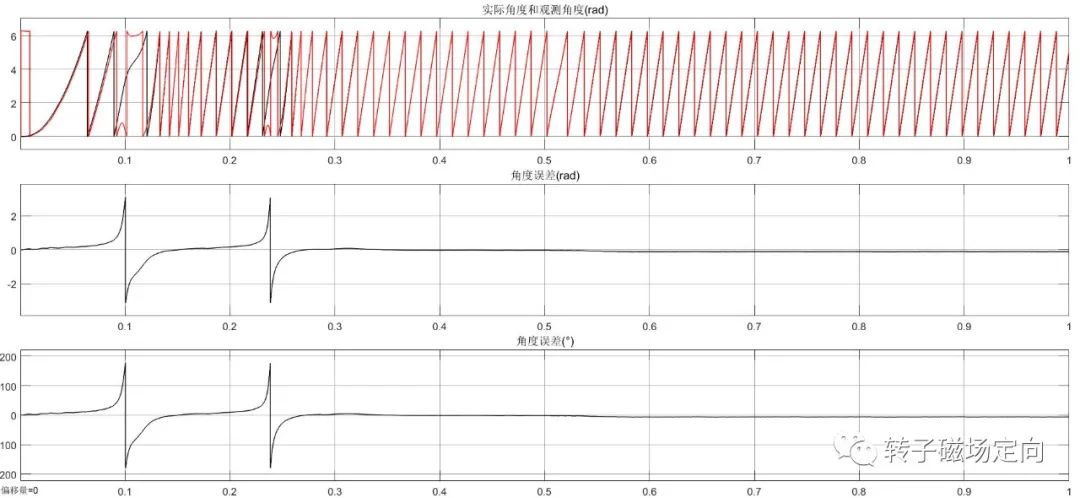
当 r=10.0,虽然瞬态下角度和速度误差很大,但是系统并没有失步,依然可以趋于稳定并带载。
r=3.0的角度误差:
r=3.0相比于1.0,误差稍大,运行效果基本相同。
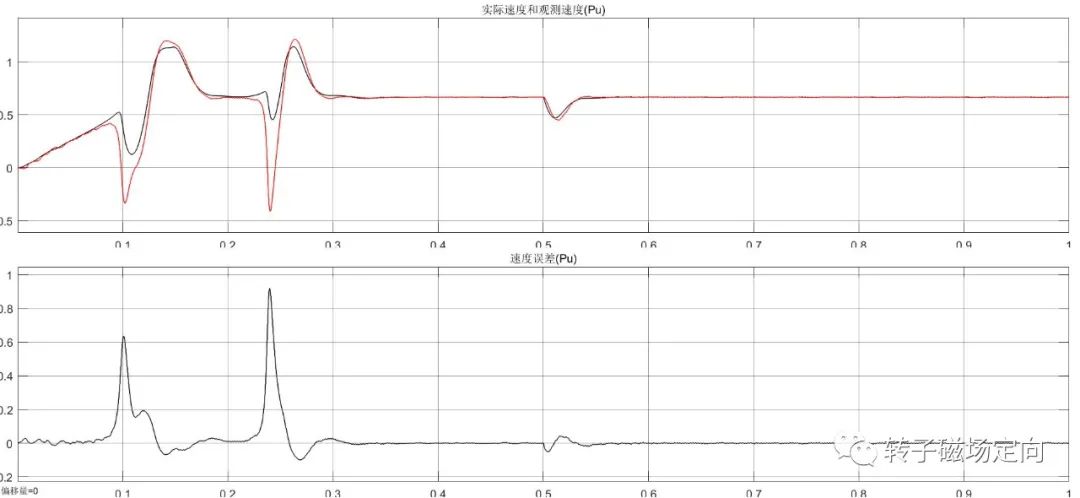
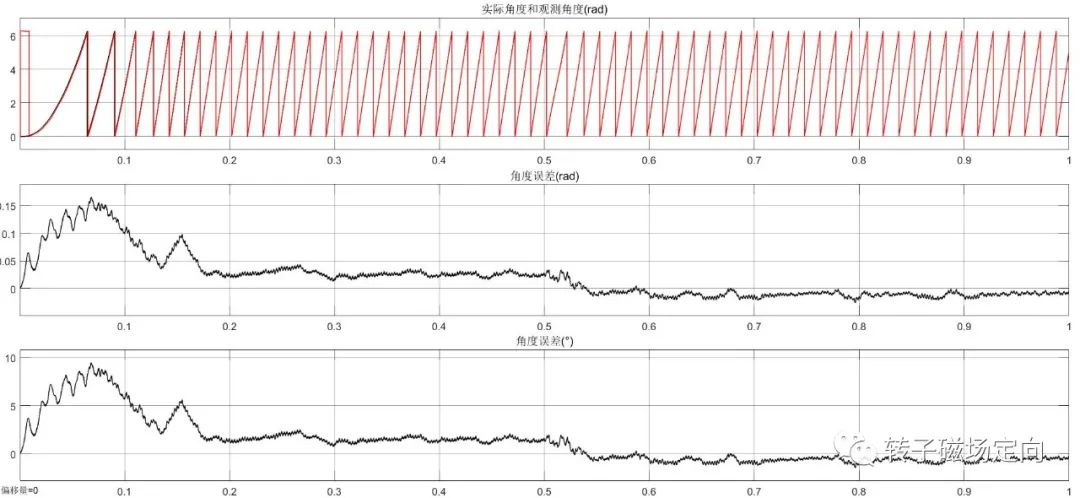
r=0.3的角度误差:
对增益r分析对比完之后,分析锁相环带宽。保持r=0.3,选取PLL带宽为10Hz,角度误差:
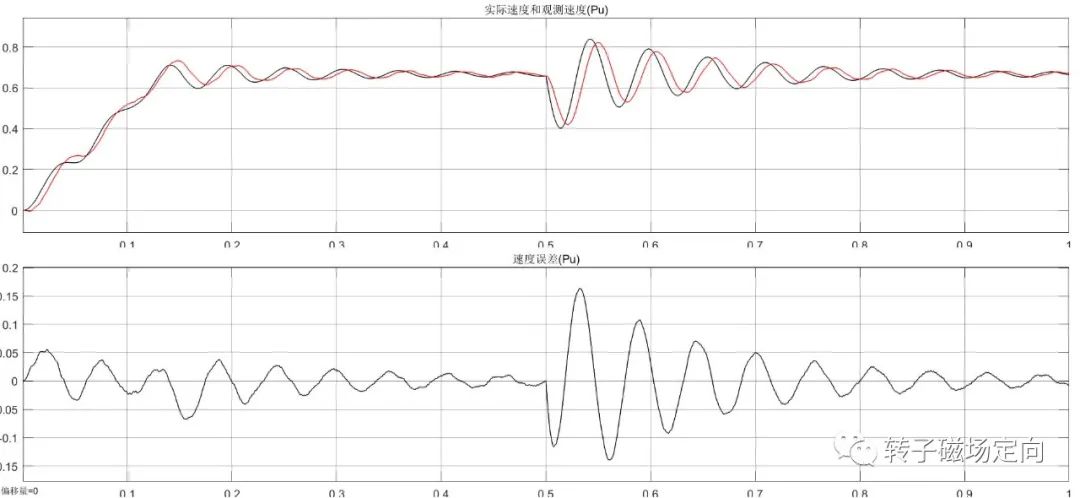
保持r=0.3,选取PLL带宽为100Hz,角度误差:
锁相环100Hz比30Hz的速度收敛快,动态性能强,但是稳态误差大很多。10Hz相比30Hz由于带宽太小,速度滞后严重。整体来说,系统没有失步,依然能趋于稳定。
通过以上仿真对比,非线性校正环节的增益r的可选取范围很大,并不会轻微的变动造成系统的失步。磁链模型最大的优势就是角度收敛快,精度高。
通过锁相环带宽对比发现,提高锁相环可以加快稳态响应,随之带来高频段噪声的放大,稳态误差加大。带宽取太低,会有明显的相位滞后,这一点不如龙伯格。
对于非线性磁链模型,无论如何调试PLL带宽,其速度误差明显要比基于反电势的模型要大,这也是其最明显的缺陷,速度环带宽要降低。至于速度误差大的原因,我认为还是因为模型是基于静止坐标系建立,模型输入有很多高频分量。这一点就不如旋转坐标系建立的模型,可以对模型输入的状态变量加滤波,滤除高频扰动。
仿真完之后,谈谈MATLAB。昨天我看到一个回答,解释了为啥现在中国开发不出来MATLAB这样的工程软件,大家可以看看。
https://www.zhihu.com/question/400835896/answer/1296690053
回答写得很深入,开发一个MATLAB只怕不是仅仅开发那么简单,更重要的是生态。比如版权,比如写程序的意识,比如前仆后继的尝试和无数倒下的创业公司。
很多工程师,就想买代码,拿到代码就去调参数,转电机。从不重视理论基础,连MATLAB使用都不愿意,有多少人愿意去开发呢?树高千尺,营养还是在根部。不重视基础,高度肯定有限。
没有版权,谁去填这个坑?很多朋友咨询培训班的细节,都问有没有视频,有没有教程,有没有代码。我压根不愿意,也不敢录视频。哪怕视频加密现在分分钟都能破解,然后9块9转卖了。
包括MCU代码,现在TB有商家专门提供业务来读出HEX文件,开发者唯一能做的只是通过软件处理确保HEX被读出后不能使用,但是对于读取行为甚至反汇编破解依然无能为力。
有一次某同行在群里发一些书的扫描版本,我建议要尊重原作者的知识版权,即使不愿意买也不应该传播,维护好这个行业,大家作为工程师以后都有饭吃。
然后有人喷我为了维护自己利益是资本家。。。
先不论我是不是资本家,这个也无所谓了。我想大家从自身的利益理性思考,电机相关行业工程师平时抱怨最多的就是这个行业太成熟了,工资低,老板压榨云云。。。屡见不鲜吧?
首先你觉得自己工资低,那说明你的老板认为你创造的价值低,所以付出的工资比较低:“你的劳动就值这么多!不干我找别人”。
现状是不光你的老板这么想,你自己也觉得自己创造的价值低呀,难道不是吗?同行专家写的书,在你眼里一文不值,某平台上9.9的代码、仿真一大把。为了可怜的几块钱价格一个比一个低。说明你就认可你所在的行业专业知识是没有价值的。
看看某平台上被低价转卖的仿真:
再看看某家培训机构的视频被破解后低价转卖:

这些视频和仿真,要么是被破解后转卖,要么是就是自己买了低价转卖。我真的不理解,10块钱的仿真你能赚多少钱?卖多少能在四线城市买一平米?不说价格了,有没有尊重过原创者的劳动?有没有想过有一天你的劳动也会被贱卖?
既然你自己都认为自己的工作没有价值,那就不难理解你的老板给你付出较低的报酬。给老板打工,其实就是一种你付出劳动,老板付费购买你的时间和劳动的平等关系。你可以不干,老板也可以不雇,最后大家达成了合作关系。
同理,很多人3000块预算找我买代码,要求性能达到TI FAST套件的水平。我反问他,TI研发花了多少钱?回答说3000万美元。我就想问问,3000万美元研发的东西你就想3000人民币买到?你这是抄底还是被抄底呢?
或者退一步,你的薪水总有5000吧?那3000块钱能解决的问题不就是你不到一个月的事吗?你难道自己做不出来?我估计做不出来吧,那你认为你可能花半年甚至几年都做不出来的东西应该价值几何呢?
具体的价格我们不展开,我想说的是,要尊重知识,尊重版权,尊重劳动。你可以不付费,或者你认为没有价值,但是你不能否认其价值的客观存在。
价值这个东西,通俗的说,只要能帮助别人,就有价值。具体价值几何,取决于市场上的供求关系决定的,并不是靠难度决定的。甚至说难度因素占比很小!
所以咱们作为同行,都要认可自己的劳动,只有这样子,别人才可能承认我们的价值,你才有获得相应报酬的可能!否则劣币驱逐良币,杀鸡取卵,最后的结果就是一文不名,你的劳动被低价贱卖,大家都没有饭吃的时候还不停地拍桌子骂资本家,抱怨zf。这是非常幼稚的行为!
目前来说,我不会出售任何代码和文档,加密视频,只接受以项目或者顾问的形式合作。因为我不想看到我的任何创作被贱卖,尊重我自己的劳动!
磁链模型有很多的衍生方法,后续会逐步研究,也会在FOC提高班和大家分享。
原创不易,感谢大家的阅读和认可。
往期文章
月薪 4 万人民币是一种怎样的感受?
在闲鱼上怎么挣钱?
月入十万难吗?
基于虚拟旋转坐标系的脉振初始位置检测方法
MATLAB到底有多厉害?
基于磁链模型的非线性观测器
HFI高频注入代码解读
产品级IPMSM高频注入低速无传感器控制方法

