

为什么会写篇栈变化的文章?做系统分析的话你肯定遇到过一些crash, oops等棘手问题,一般大家都会用 gdb, objdump 或者 addr2line等工具分析 pc 位置来定位出错的地方。但是这些分析工具背后的本质原理就不见得理解深刻了,而且有的时候面对一系列 backtrace 或者 stack 日志处于懵逼的状态。
今天和大家一起看下面对 crash 日志的时候,如何利用 stack 来分析其变化的来龙去脉。
Arm指令集介绍
1. r0-r3 用作传入函数参数,传出函数返回值。在子程序调用之间,可以将 r0-r3 用于任何用途。被调用函数在返回之前不必恢复 r0-r3。---如果调用函数需要再次使用 r0-r3 的内容,则它必须保留这些内容。 2. r4-r11 被用来存放函数的局部变量。如果被调用函数使用了这些寄存器,它在返回之前必须恢复这些寄存器的值。r11 是栈帧指针 fp。 3. r12 是内部调用暂时寄存器 ip。它在过程链接胶合代码(例如,交互操作胶合代码)中用于此角色。在过程调用之间,可以将它用于任何用途。被调用函数在返回之前不必恢复 r12。 4. 寄存器 r13 是栈指针 sp。它不能用于任何其它用途。sp 中存放的值在退出被调用函数时必须与进入时的值相同。 5. 寄存器 r14 是链接寄存器 lr。如果您保存了返回地址,则可以在调用之间将 r14 用于其它用途,程序返回时要恢复 6. 寄存器 r15 是程序计数器 pc。它不能用于任何其它用途。
演示代码
#include <stdio.h>int m = 8;int fun(int a,int b){int c = 0;c = a + b;return c;}int main(){int i = 4;int j = 5;m = fun(i, j);return 0;}
编译一下,然后反汇编:
$ arm-linux-gnueabi-gcc main.c -o main $ arm-linux-gnueabi-objdump -D -D main
00010400 <fun>:10400: e52db004 push {fp} ; (str fp, [sp, #-4]!)10404: e28db000 add fp, sp, #010408: e24dd014 sub sp, sp, #201040c: e50b0010 str r0, [fp, #-16]10410: e50b1014 str r1, [fp, #-20] ; 0xffffffec10414: e3a03000 mov r3, #010418: e50b3008 str r3, [fp, #-8]1041c: e51b2010 ldr r2, [fp, #-16]10420: e51b3014 ldr r3, [fp, #-20] ; 0xffffffec10424: e0823003 add r3, r2, r310428: e50b3008 str r3, [fp, #-8]1042c: e51b3008 ldr r3, [fp, #-8]10430: e1a00003 mov r0, r310434: e24bd000 sub sp, fp, #010438: e49db004 pop {fp} ; (ldr fp, [sp], #4)1043c: e12fff1e bx lr00010440 <main>:10440: e92d4800 push {fp, lr}10444: e28db004 add fp, sp, #410448: e24dd008 sub sp, sp, #81044c: e3a03004 mov r3, #410450: e50b300c str r3, [fp, #-12]10454: e3a03005 mov r3, #510458: e50b3008 str r3, [fp, #-8]1045c: e51b1008 ldr r1, [fp, #-8]10460: e51b000c ldr r0, [fp, #-12]10464: ebffffe5 bl 10400 <fun>10468: e1a02000 mov r2, r01046c: e59f3010 ldr r3, [pc, #16] ; 10484 <main+0x44>10470: e5832000 str r2, [r3]10474: e3a03000 mov r3, #010478: e1a00003 mov r0, r31047c: e24bd004 sub sp, fp, #410480: e8bd8800 pop {fp, pc}10484: 00021024 andeq r1, r2, r4, lsr #32
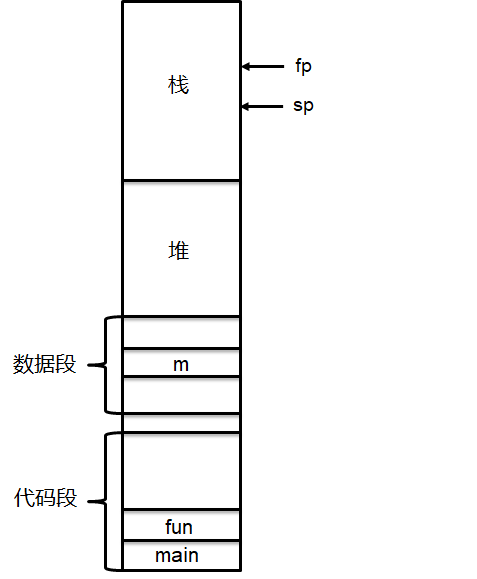
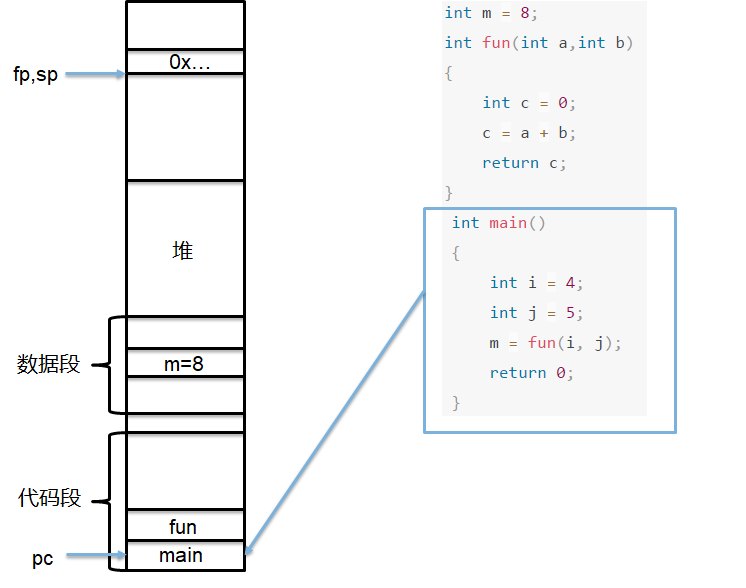
图解栈的变化过程
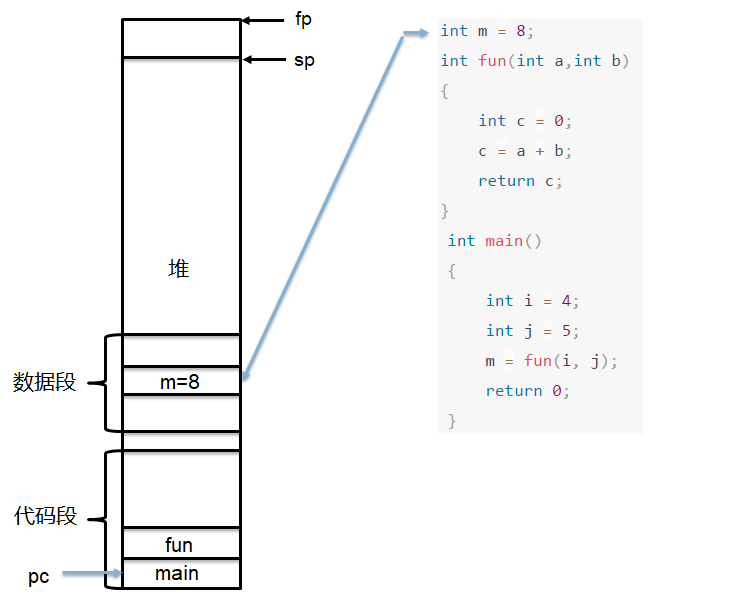
2.全局变量m赋值
3.保存进入main之前的栈底, fp-sp之间是当前函数栈
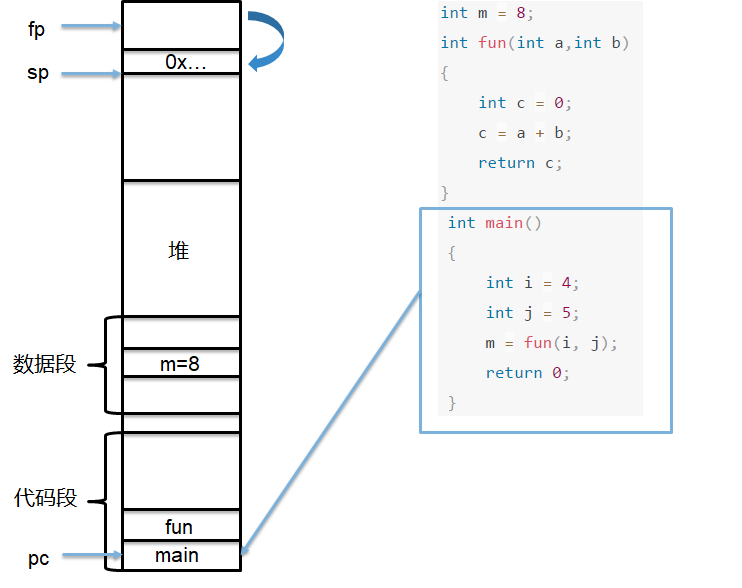
4.函数main的栈已经准备好了
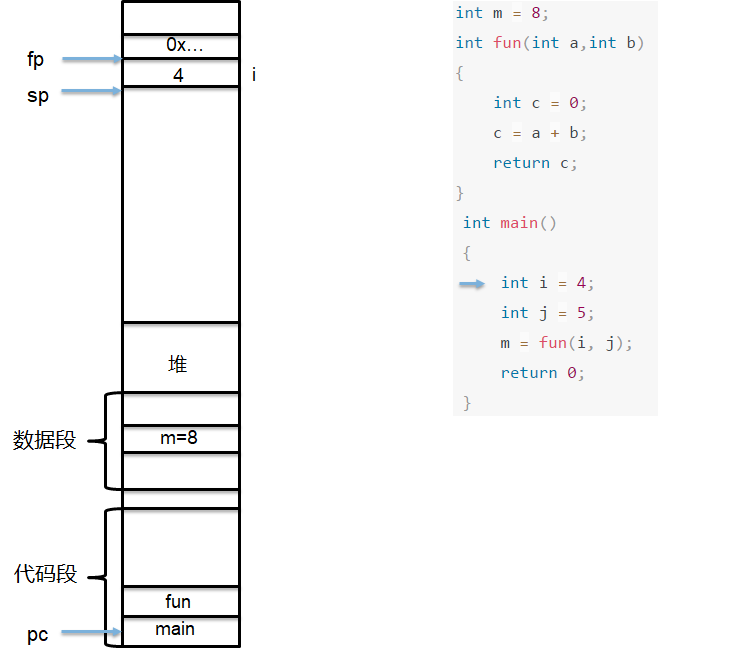
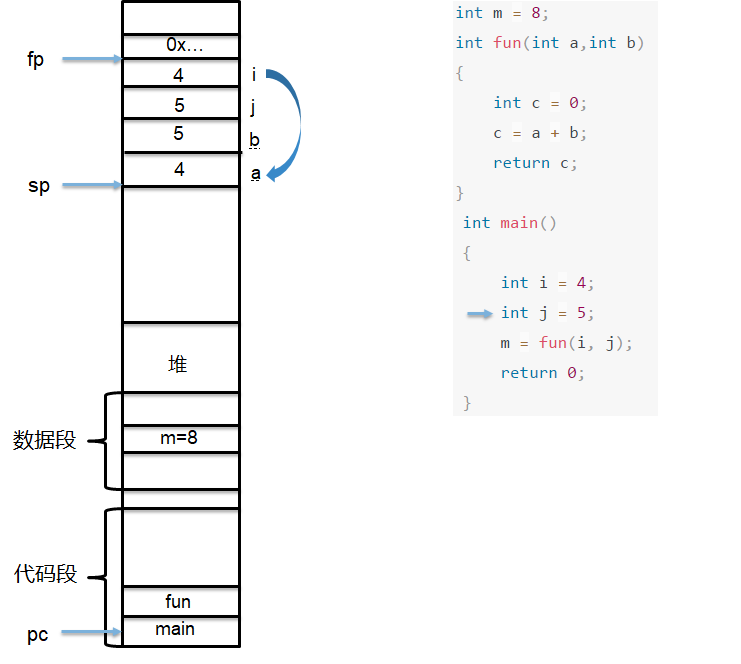
5.i入栈
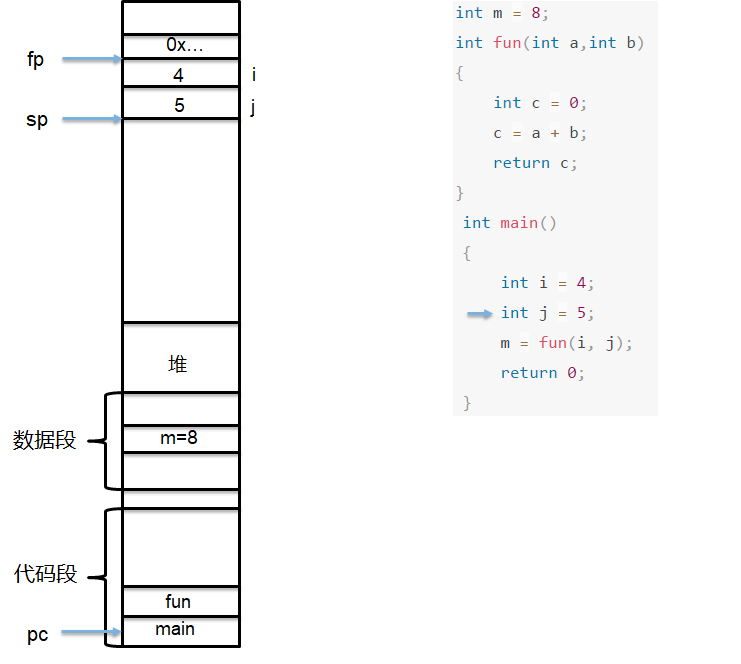
6.j入栈
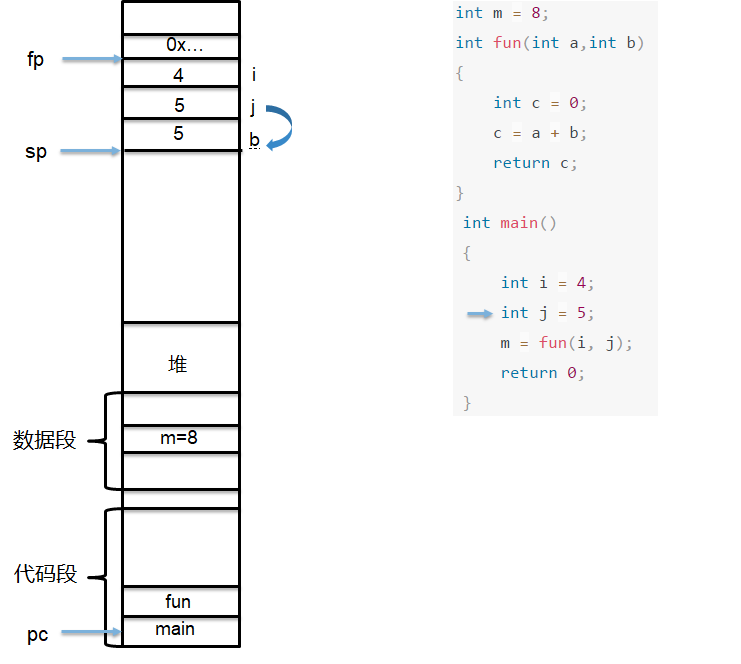
7.准备函数fun的调用, 形参反向入栈 先形参b入栈
8.形参a入栈
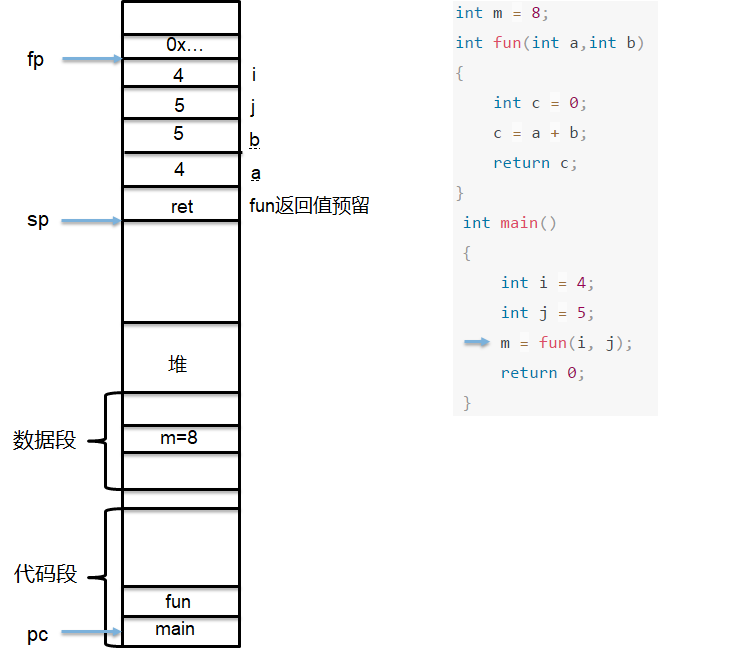
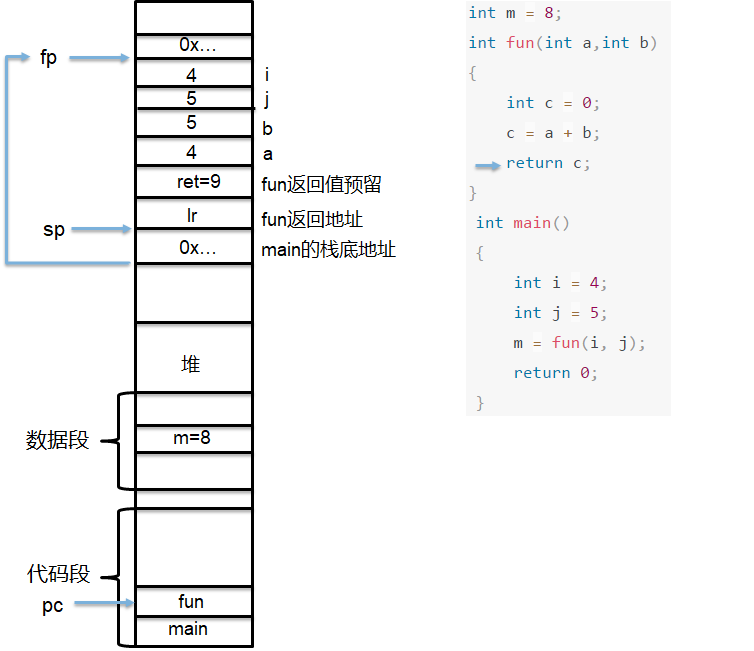
9.留空一个地址作为fun返回值, 待后面返回时填入
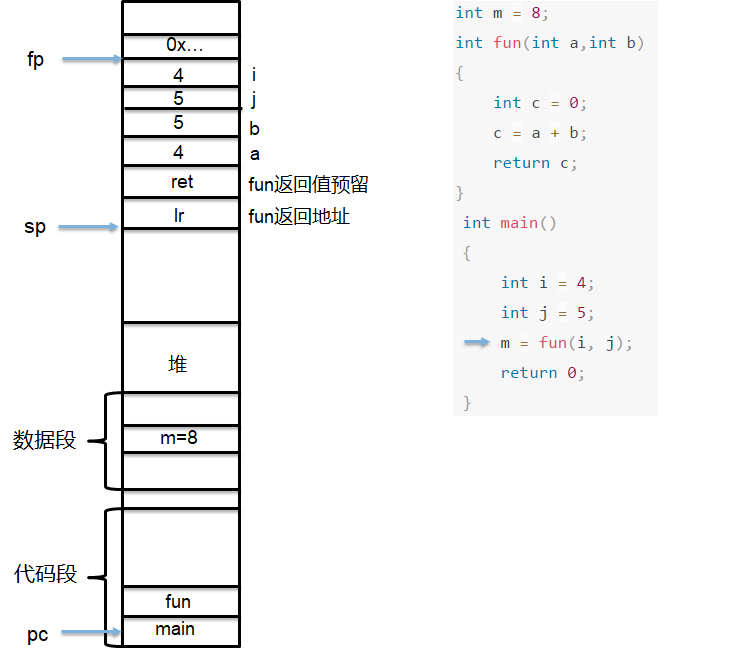
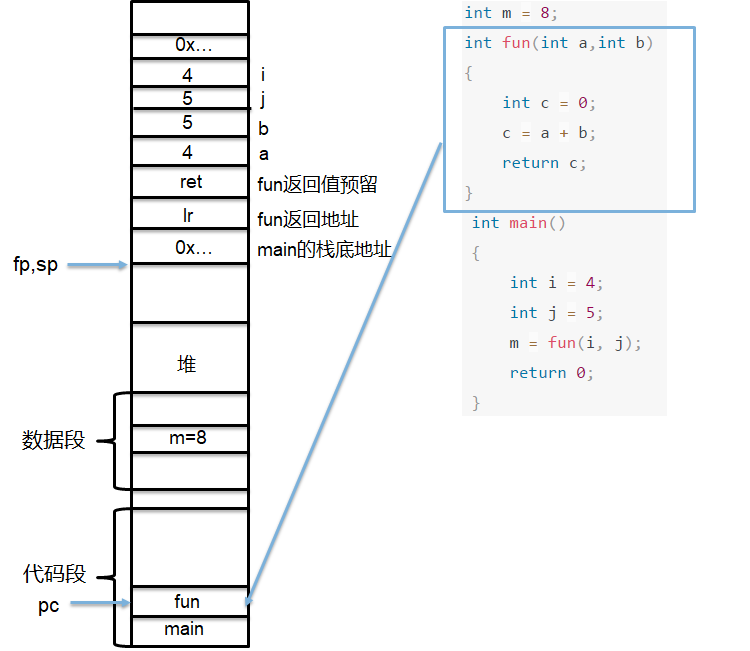
10.fun返回地址入栈, 通常是main函数当前pc指针的下一个
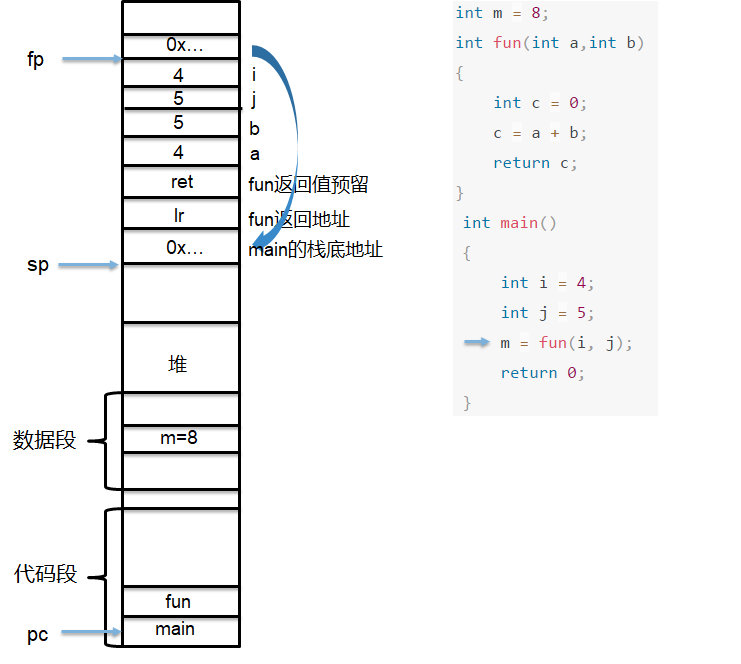
11.main函数的栈底地址入栈
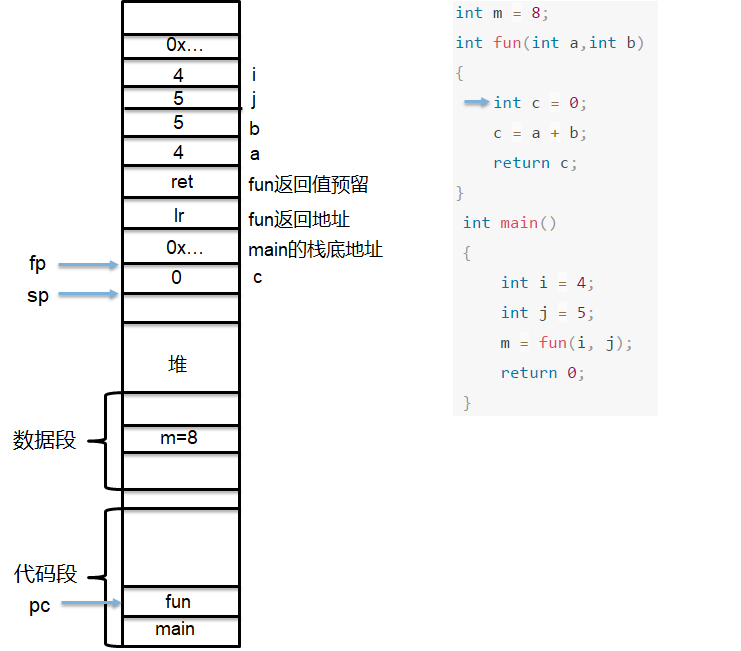
12.pc指针跳转fun代码
13.c入栈
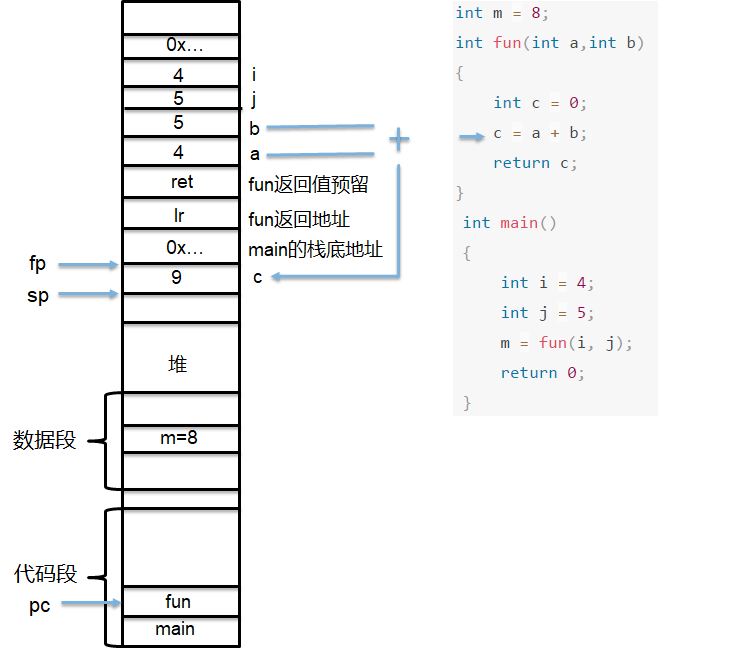
14.可以看到函数fun的数据 形参a,b 在上一层函数的栈中. 一部分在自己的栈上. 此步取值到加法器中进行加法运算,再赋值给c
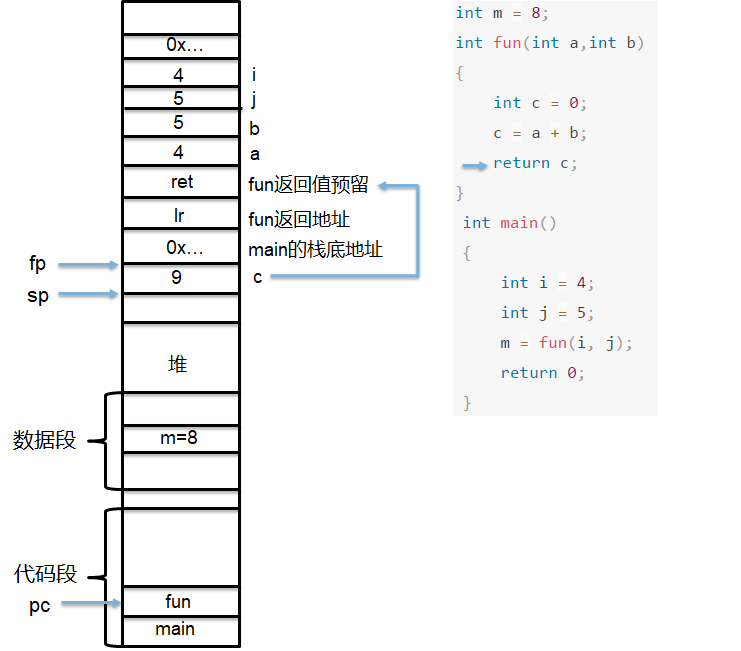
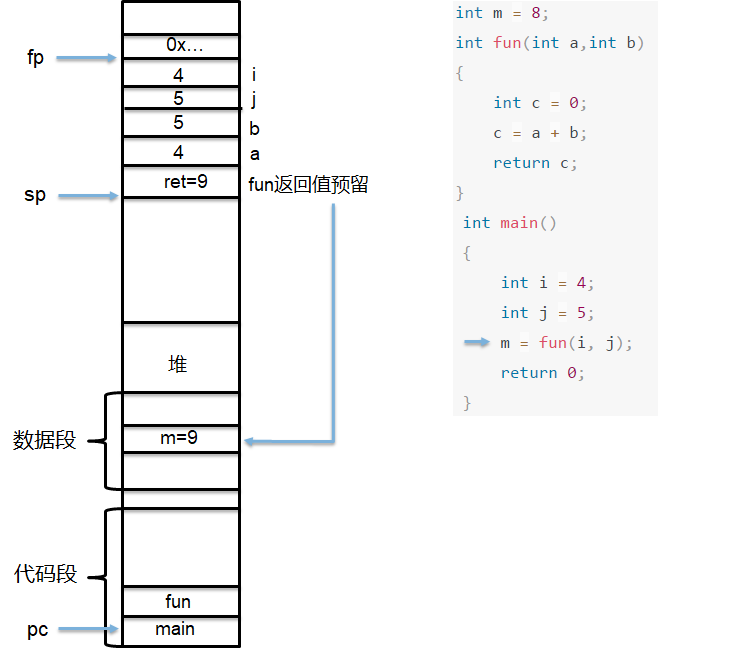
15.c赋给返回值,填入上面的留空位置
16.栈底恢复上一层
17.lr赋值给pc, 实现了跳转

18.返回值赋值给全局变量m
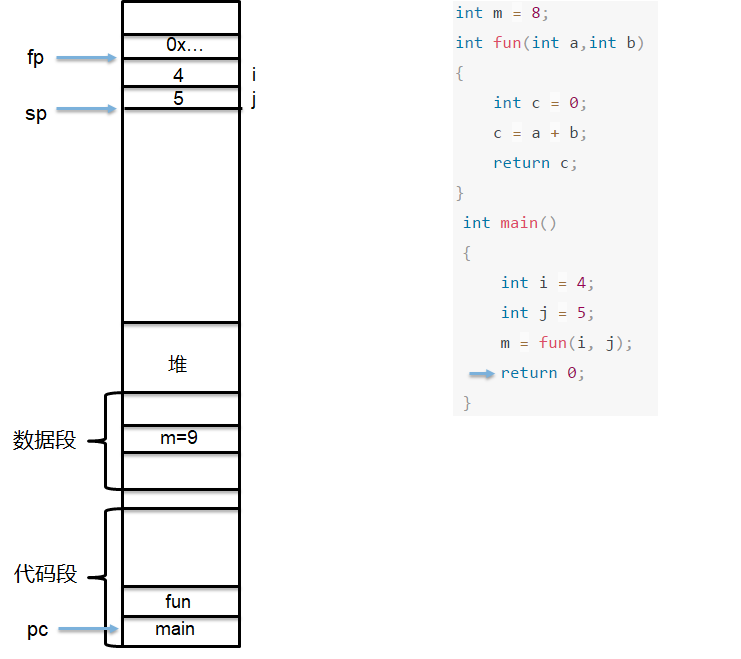
19.前面函数调用的形参已经无用,回滚sp
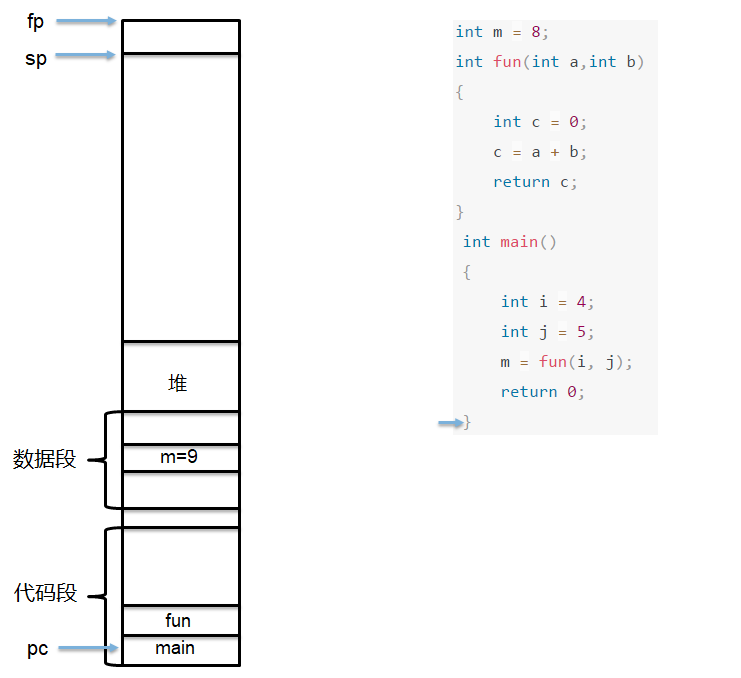
20.函数返回,清理main的栈空间
总结

1.国产嵌入式操作系统,你最看好哪一个?
2.杨福宇专栏|温州特斯拉失控案EDR数据的深度解读
3.【视频上线】嵌入式实时操作系统学习之道
4.学习STM32单片机,绕不开的串口
5.RISC-V产业的现状与未来~
6.当MCU死机了,先把硬件抓过来~
免责声明:本文系网络转载,版权归原作者所有。如涉及作品版权问题,请与我们联系,我们将根据您提供的版权证明材料确认版权并支付稿酬或者删除内容。
