了解工程团队如何满足无线吸尘器客户的严苛要求:超大吸力、小巧轻便以及较长且可靠的产品生命周期。了解使用现代无刷直流电机 (BDLC) 与电源应用电机控制器迎接挑战的设计细节。
在 21 世纪家居中,已经有无数示例充分证明电机这种简单的日常设备如何通过现代设计成为越来越多家用电器不可或缺的组成部分。在家里,冰箱、电脑、微波炉、风扇、洗衣机和吸尘器都使用了电机。在外面,车库开门器、商店真空吸尘器、园艺修剪器、无绳微耕机、电动割草机、压力清洗机和其他庭院设备也离不开电机的使用。
20 世纪初,简单的交流电感电机和有刷直流电机为洗衣机、冰箱和风扇提供动力,自那时以来,我们已经取得了长足的进展。如今,电机设计已经发展至无刷直流式。这种设计适应了消费者的偏好,同时可提高效率,延长无线设备的续航时间,适合更小巧轻便的设备,并实现更高可靠性。能源效率咨询委员会1 (ACEE),即国际电工委员会 (IEC) 附属机构的一项研究表明:“电机系统用电量占全球 50% 以上,其中绝大多数电机用于机器、泵、风扇、压缩机、传送带等。这是提高能源效率的绝佳机会。”

本博客文章以一个工程项目为例,说明了 Qorvo 如何通过使用高级 PMSM(永磁同步电机)提供异常高的功率和速度,从而帮助满足大功率无线吸尘器的设计规范。
2018 年,全球真空吸尘器市场规模达到 92 亿美元。据 Grand View Research2 称,这一市场呈现强劲增长趋势。他们预计,在 2019 年至 2025 年的预测期内,复合年增长率将达到 9.1%,这主要受职业女性人口增加以及生活水平提高带来的全新消费者预期推动。
消费者对节能电器操作和环境问题的关注在很大程度上推动了这一市场的增长。另一个增长因素就是,为减少有害粉尘,改进医院、制造中心、零售商店和医疗设施等环境的卫生实践,工作场所真空吸尘器的需求不断增加。
参与这个项目的真空吸尘器设计团队和 Qorvo 工程师需满足客户对无线吸尘器的严苛要求。最终的设计采用了可实现最大吸力的高速电机操作、小巧轻便的外形设计以及可实现较长且可靠产品生命周期的组件。该真空吸尘器要求的吸力水平高于大多数传统的便携式真空吸尘器。影响设计方案的另一个因素为:在大多数真空吸尘器设计中,转矩和电机速度都是重要的因素。然而,本例的要求略有不同,它强调了对功率和速度的需求。
客户的设计规范要求使用配备磁场定向控制 (FOC) 的 PMSM 电机,以实现变频驱动 (VFD),满足产品要求。
ADC — 模数转换器
BLDC — 无刷直流电机
FOC — 磁场定向控制
IEC — 国际电工委员会
MCU — 微控制器单元
PMSM — 永磁同步电机
PWM — 脉宽调制器
VFD — 变频驱动
开始这个项目时,Qorvo 和设计团队就知道最终产品将是一款高性能真空吸尘器,因此他们选择使用三相 PMSM,因为该电机采用正弦波换向,有助于尽可能地提高性能。该设计依靠 FOC 并使用一种用于控制定子旋转磁场的算法,同时利用两个正交分量来调节磁通发生器,确定可用转矩。
使用 FOC 和 Qorvo 开发的定制算法可以精确控制电机速度,并尽可能提高真空吸尘器的整体效率。经过设计团队和 Qorvo 数月的通力合作,最终产品成功地满足了客户的产品需求。双方合作设计的这款强大且高效的无线真空吸尘器现已上市。
手持式真空吸尘器通过旋转电机驱动风扇产生吸力,而吸力将空气从吸尘器的头部抽出,然后将吸入的灰尘和碎片收集在一个袋子或罐子中,并通过排气口排出。通常,放置在排出蒸汽中的过滤器可防止排出微粒。风扇电机的转速和进气口(或附件)的尺寸决定了吸力大小,这是由从头部抽走空气并从排气口强制排出时产生的负压确定的。在高端真空吸尘器中,风扇转速通常可达到每分钟 10 万转以上,比如 Qorvo 参与的产品设计。
为实现最佳性能,现代手持式真空吸尘器采用无刷直流 (BLDC) 电机,从而可以在电机外壳内产生旋转磁场。在这种无刷设计中,定子和线圈是固定的,永磁体附在转子上,而转子随着循环磁场旋转。定子线圈的电流由外部电子电机控制器精确控制,从而可以产生可变转速。与有刷直流电机和传统电感电机相比,BLDC 设计更复杂,但更具可控性,其优点包括运行效率高、外形尺寸更小巧、可靠性更高并且具有超长耐用性。
本项目选用的 BLDC 电机为正弦波驱动的三相 PMSM,是满足高性能要求的不二选择。本项目的标准包括:
超高速电机运转
具有过压保护的恒定功率控制
快速启动操作
经济高效的设计组件
下一节将讨论使 Qorvo 和设计团队能够满足这些标准的设计功能。
Qorvo 电源应用控制器 (PAC) 系列3中的 Qorvo CST32251 IC 是真空吸尘器项目设计的核心。这款片上系统 (SoC) 具有构建简单、紧凑且具成本效益的电机控制板所需的全面功能性(见图 2)。本设计中的控制板包括集成式电源管理系统、50 MHz 32 位 ARM Cortex-M0 微控制器单元 (MCU)、栅极驱动器、运算放大器、比较器以及其他支持部件。可通过增加在不同条件下实现恒定功率输出的外设 MOSFET 完成集成设计。
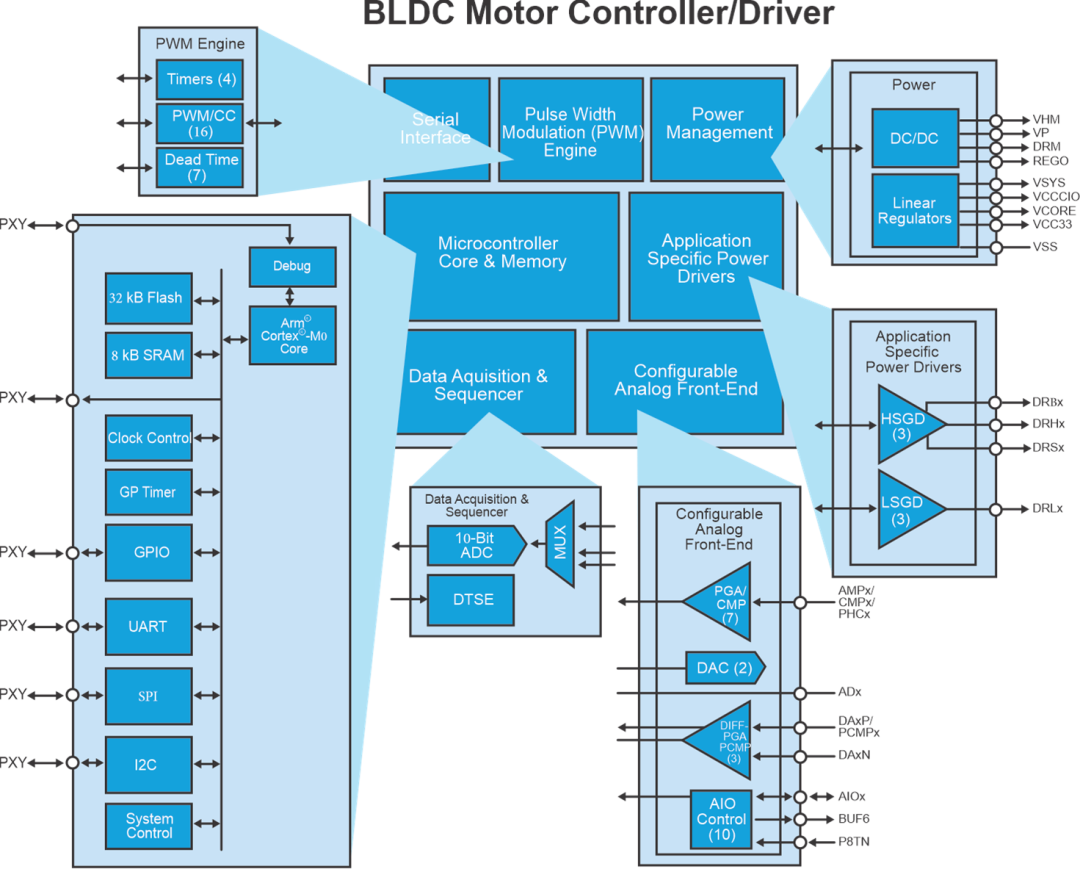
图 1.PMSM 电机控制器和驱动器的功能框图。
超高电机转速是这个项目的一个重要设计参数,旨在使其达到远高于市场上标准真空吸尘器的水平。为实现高达 150,000 rpm 的机械速度,要求密切管理由 ARM Cortex M0 MCU 控制的模数转换器 (ADC) 和脉宽调制器 (PWM) 的运行。所需的电频率范围可达 2.5 kHz,且为了实现 FOC 的精确控制,ADC 采样速度和精度必须高达 1 MSPS,同时要求 PWM 具有非常精细的分辨率。微控制器可确保对这些值进行精调,以实现精确的操作,而 Qorvo 开发的 FOC 定制算法旨在满足这些要求,并加快 FOC 的操作序列。
真空吸尘器的吸力受到许多不同因素的影响,包括不同附件的风管体积、电池电量、堵塞真空吸尘器的任何吸入物体以及充满灰尘和碎屑的排气过滤器。从这方面讲,在不断变化的条件下保持恒定功率是尽可能增大吸力的关键。基于转矩或电机转速调节的设计不能很好地响应影响吸力强度的所有因素,而由集成在 SoC 中的微控制器监控并由定制的 Qorvo FOC 算法控制的调节功率可实现更加一致的结果。利用 ADC 采集的内部功率水平数据可进行实时计算,并可快速进行必要的功率调整。
Qorvo 芯片提供的电机控制功能也支持多种保护措施,如:
过压保护、欠压保护以及过电流检测和调节
内部电源监控和保护/li>
堵转保护
开路保护
MCU 的超温关机和重启(需要时)
从设计角度来看,如果没有 Qorvo 芯片提供的计算能力,控制和保护真空吸尘器中的电源系统将需要大量附加的设计工作和许多额外的组件。通过将 Qorvo SoC 集成到产品中,可以在各种条件下保持 120,000 rpm 的恒定电机转速。这款芯片可提供驱动真空电机并尽可能提高效率所需的一切。
为确保真空吸尘器的平稳快速启动,电机启动算法需要使用转子位置信息。为获取这一信息,Qorvo 使用其 SoC 向电机发送高频信号,以捕获三相电机电感的相关数据。启动算法可利用这些数据计算转子位置。在上一代无刷电机设计中,昂贵且易出故障的霍尔传感器被用来检测转子位置,但在本设计中,Qorvo SoC 的内置功能便可处理这项任务,且无需任何额外的霍尔传感器组件。
转子位置的信息使其有可能避免启动期间的反向旋转,同时也有助于实现大约 5 秒内的快速启动速度。
将执行电机控制功能的所有逻辑和电路整合到单个 Qorvo PAC 电机控制芯片中是实现本产品高性价比设计的关键。通过避免在设计中使用分立元件,可最大限度地减少维护需求,并延长产品生命周期。高度集成的 SoC 可提供电源、栅极驱动、模拟前端、经济实惠的 ARM 嵌入式处理器以及其他部件,从而降低物料清单 (BOM) 成本。
Qorvo 开发的复杂算法可通过可用的 SoC 硬件实现各种电机控制功能。例如,本设计采用基于单电阻采样方法的无传感器 FOC 控制,不像许多上一代设计中那样需要使用三个采样电阻。图 2 显示了执行这些操作的电路。
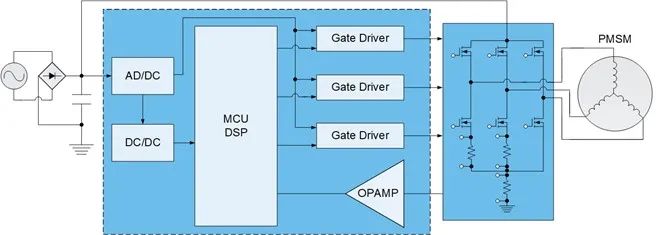
图 2.电机驱动器电路中的关键组件。
自定义算法支持设计中的电源保护和高效功能,同时可降低整体功耗,并在更大范围的条件下实现惊人的性能。在睡眠模式下,Qorvo PAC 控制的功耗为 12 微安,而真空吸尘器的待机功率要求也非常低。
与本设计一样,Qorvo 与客户密切合作,开发可扩展现有技术边界的解决方案,同时协作设计可平衡性能、效率和成本的产品。
Motor Control Fundamentals for Dummies4 使用清晰、简洁的术语介绍了电机控制背后的技术,为开发无刷直流电机解决方案提供了有益的参考。
能源效率咨询委员会
https://www.iec.ch/blog/apply-energy-efficiency-concepts-electric-motors
Grand View Research
https://www.grandviewresearch.com/industry-analysis/vacuum-cleaner-market
Qorvo 电源应用控制器 (PAC) 系列
https://www.qorvo.com/products/power-management/intelligent-motor-controllers
Motor Control Fundamentals for Dummies
https://www.qorvo.com/design-hub/ebooks/motor-control-for-dummies

Jose Quinones 拥有超过 25 年的电机应用工作经验。作为一名应用工程师,他负责与客户协同设计各种运动控制嵌入式应用(从概念到硬件、软件和固件实现),以创造新颖且更高效的产品。