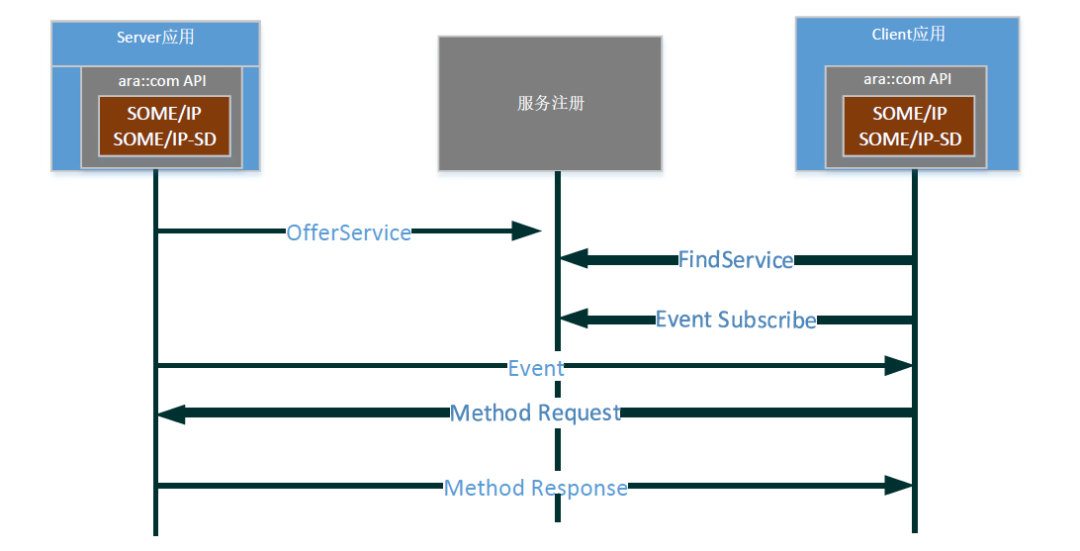
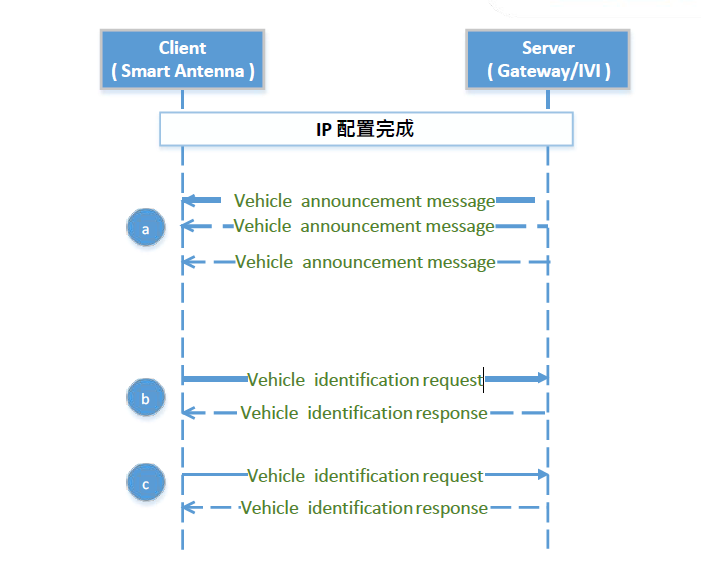
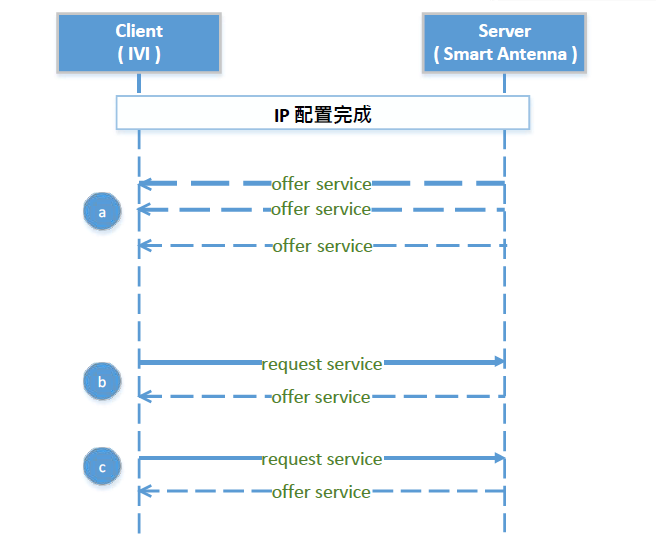
Server 以固定间隔时间,周期性的发送offer service 消息,该消息中携带服务ID、实例ID、端口号、IP 地址等信息,如图2-17 中a 处所示。
由Client 在适当时机以组播方式发送request server 消息,收到该消息的Server 以单播的形式回复offer service 消息,其中携带逻辑地址、VIN、EID 等信息。如图2-17 中b、c 处所示。
在线直播意法半导体“在中国,为中国”战略,STM32最新产品、应用及生态; STM32线上训练营带您玩转机械手直播:边缘AI及GUI软硬件开发特训,ST资深专家在线互动答疑。