


来源 | 天池航宇
智库 | 云脑智库(CloudBrain-TT)
云圈 | 进“云脑智库微信群”,请加微信:15881101905,备注研究方向
编注:阅读有困难的朋友,可以点击右上方“•••”这个符号,点击里面的全文翻译供阅读参考!
Unmanned Aircraft Systems (UAS), also known as “drones”, have become a public topic of interest and scrutiny over the past few years – we have all seen the headlines about mysterious drones flying too close to airliners and quadcopter cameras peeping into apartment windows! As with any media sensation, however, we must remember that there is more to the subject than can be expressed in a 10 second sound bite!
Over the course of this presentation, I intend to describe how this technology came to be, what has prompted the technology explosion in the past few years, how and why UAS are being used for legitimate, business purposes, and how the Canadian regulations governing the use of UAS are protecting us, yet allowing the industry to evolve. I will also try to address the challenge we are all facing regarding the recreational use of this amazing technology, as well as some ideas on what the future holds.
Over the course of this presentation, I intend to describe how this technology came to be, what has prompted the technology explosion in the past few years, how and why UAS are being used for legitimate, business purposes, and how the Canadian regulations governing the use of UAS are protecting us, yet allowing the industry to evolve. I will also try to address the challenge we are all facing regarding the recreational use of this amazing technology, as well as some ideas on what the future holds.
0
Leonardo DaVinci 1452 -1519 – “Simplicity is the ultimate sophistication”
Leonardo di ser Piero da Vinci, more commonly Leonardo da Vinci, (Italian: [leoˈnardo da (v)ˈvintʃi] ( listen); 15 April 1452 – 2 May 1519) was an Italian polymath whose areas of interest included invention, painting, sculpting, architecture, science, music, mathematics, engineering, literature, anatomy, geology, astronomy, botany, writing, history, and cartography. He has been variously called the father of paleontology, ichnology, and architecture, and is widely considered one of the greatest painters of all time.Sometimes credited with the inventions of the parachute, helicopter and tank, his genius epitomized the Renaissance humanist ideal.
Leonardo is revered for his technological ingenuity. He conceptualised flying machines, a type of armoured fighting vehicle, concentrated solar power, an adding machine, and the double hull, also outlining a rudimentary theory of plate tectonics. Relatively few of his designs were constructed or were even feasible during his lifetime, but some of his smaller inventions, such as an automated bobbin winder and a machine for testing the tensile strength of wire, entered the world of manufacturing unheralded. He made substantial discoveries in anatomy, civil engineering, optics, and hydrodynamics, but he did not publish his findings and they had no direct influence on later science.
Sir George Cayley, 6th Baronet (27 December 1773 – 15 December 1857) was a prolific English engineer and is one of the most important people in the history of aeronautics. Many consider him to be the first true scientific aerial investigator and the first person to understand the underlying principles and forces of flight.
In 1799 he set forth the concept of the modern aeroplane as a fixed-wing flying machine with separate systems for lift, propulsion, and control. He was a pioneer of aeronautical engineering and is sometimes referred to as "the father of aviation", Designer of the first glider to carry a human being aloft, he discovered and identified the four aerodynamic forces of flight, which act on any flying vehicle: weight, lift, drag, and thrust. Modern aeroplane design is based on those discoveries, and also on the importance of cambered wings, also identified by Cayley.
He worked over half a century before the development of powered flight; his importance was acknowledged by the Wright brothers. He constructed the first flying model aeroplane and also diagrammed the elements of vertical flight.
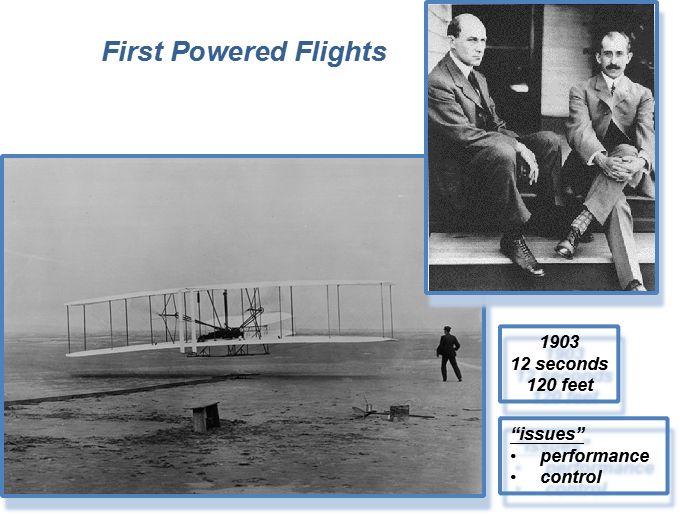
On December 17, 1903, Orville Wright piloted the first powered airplane 20 feet above a wind-swept beach in North Carolina. The flight lasted 12 seconds and covered 120 feet. Three more flights were made that day with Orville\\\\\\'s brother Wilbur piloting the record flight lasting 59 seconds over a distance of 852 feet.
The brothers began their experimentation in flight in 1896 at their bicycle shop in Dayton, Ohio. They selected the beach at Kitty Hawk as their proving ground because of the constant wind that added lift to their craft. In 1902 they came to the beach with their glider and made more than 700 successful flights.
Having perfected glided flight, the next step was to move to powered flight. No automobile manufacturer could supply an engine both light enough and powerful enough for their needs. So they designed and built their own. All of their hard work, experimentation and innovation came together that December day as they took to the sky and forever changed the course of history. The brothers notified several newspapers prior to their historic flight, but only one - the local journal - made mention of the event.

World War 1
– Observation transformed into bombing, then aerial warfare
Advances in aviation were extreme in all aspects
Conclusion of War led to an abundance of aviation technology available to be exploited for non-military purposes
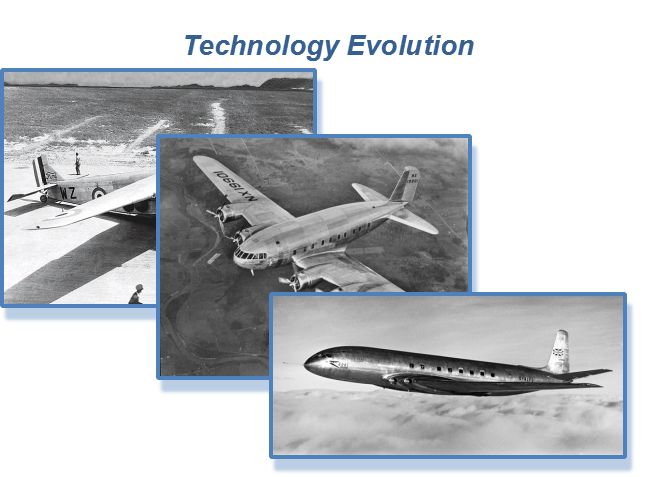
“the pick up truck” – carried cargo/people - The Ford Trimotor (also called the "Tri-Motor", and nicknamed "The Tin Goose") was an American three-engined transport aircraft that was first produced in 1925 by the companies of Henry Ford and that continued to be produced until June 7, 1933. Throughout its time in production, a total of 199 Ford Trimotors we Get above the weather to improve operational reliability and comfort - The Boeing Model 307 Stratoliner was the first commercial transport aircraft to enter service with a pressurized cabin. This feature allowed the aircraft to cruise at an altitude of 20,000 ft (6,000 m), well above many weather disturbances. The pressure differential was 2.5 psi (17 kPa), so at 14,700 ft (4,480 m) the cabin altitude was 8,000 ft (2,440 m). The Model 307 had capacity for a crew of five and 33 passengers. The cabin was nearly 12 ft (3.6 m) across. It was the first land-based aircraft to include a flight engineer as a crew member (several flying boats had included a flight engineer position earlier).
Faster, cheaper - The de Havilland DH 106 Comet was the first production commercial jetliner. Developed and manufactured by de Havilland at its Hatfield Aerodrome, Hertfordshire, United Kingdom headquarters, the Comet 1 prototype first flew on 27 July 1949. It featured an aerodynamically clean design with four de Havilland Ghost turbojet engines buried in the wings, a pressurised fuselage, and large square windows. For the era, it offered a relatively quiet, comfortable passenger cabin and showed signs of being a commercial success at its 1952 debut.signed for the civil aviation market, but also saw service with military units. The Ford Trimotor was sold around the world.

Today’s aviation, refinements of the technologies developed over the first 46 years of manned aviation.
Lots of technology developments, particularly military, have been overlooked in this presentation.
Given manned aviation’s history, can anyone guess at when unmanned aviation truly started?
Before World War I, the possibility of using radio to control aircraft intrigued many inventors. One of these, Elmer Sperry, succeeded in arousing the US Navy\\\\\\'s interest. Sperry had been perfecting gyroscopes for naval use since 1896 and established the Sperry Gyroscope Company in 1910. In 1911, airplanes had only been flying for eight years, and yet Sperry became intrigued with the concept of applying radio control to them. He realized that for radio control to be effective, automatic stabilization would be essential, so he decided to adapt his naval gyro-stabilizers (which he had developed for destroyers).
The first test flights of an autopilot-equipped aircraft was in September, 1917, and took place with a human pilot on board to fly the takeoff. By November, the system successfully flew the aircraft to its intended target at a 30-mile (48 km) range, where the distance-measuring gear would drop a bag of sand. Accuracy was within two miles (3 km) of target.
Clearly, though, more attention to flight testing the basic design was needed, particularly in the area of handling qualities. Sperry and his assistant, N. W. Dalton, obtained a Marmon automobile, and mounted the Curtiss-Sperry Flying Bomb to the top of it. In this configuration, Sperry and his crew drove the Long Island Motor Parkway at 80 mph (130 km/h), one of the first examples of an open-air wind tunnel, and adjusted the flight controls to what they thought was the optimum settings. The design of the fuselage was changed slightly, lengthening it by two feet.
The Marmon was not only an excellent way to adjust the flight controls, it was realized that it would also be a good launching platform, and this was tried on March 6, 1918. The aircraft left the car cleanly, and flew in stable flight for the 1,000 yards (910 m) that the distance-measuring gear had been set for. For the first time in history, an unmanned, heavier-than-air vehicle had flown in controlled flight.
The feat, however, could not be duplicated, and it was thought that the roadway was too rough. The Marmon was fitted with railroad wheels, and an unused spur of the Long Island Rail Road, four miles (6 km) east of Farmingdale, New York was put back into service. On the first try, before full flying speed had been reached, the aircraft developed enough lift to raise the front wheels off the track, and another crash resulted. It was time to re-think the catapult system, and to help design it, Sperry and Hewitt hired a young and promising engineer named Carl Norden. The first try with the new system was in August, 1918, and it too resulted in a crash. Two more tests were tried, with the stabilization package that had been design for the Flying Bomb replaced with the four-gyro system used earlier on the N-9 tests, but the result was again a disappointment, with very short flights ending in crashes. On the last one, on September 26, the Flying Bomb climbed straight for about a hundred yards, then entered a spiral dive and crashed. This was the final flight for the Curtiss-Sperry Flying Bomb, as all the usable airframes had been consumed in crashes, and there remained no confidence in the design. Sperry and Hewitt returned to the N-9.
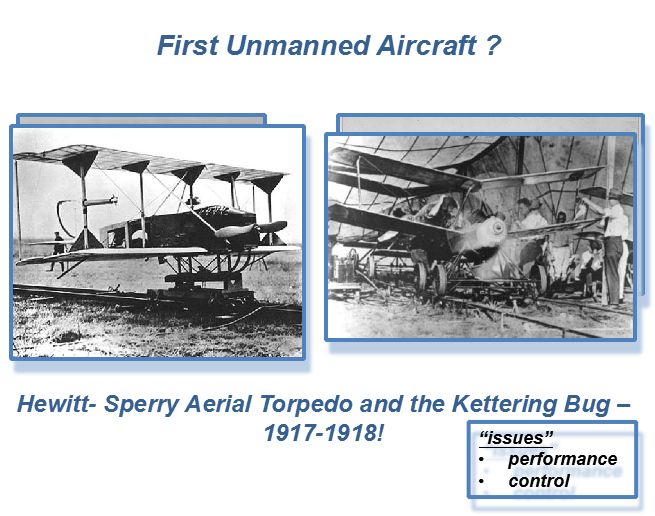
During World War I, the United States Army aircraft board asked Charles Kettering of Dayton, Ohio to design an unmanned "flying bomb" which could hit a target at a range of 64 kilometres (40 mi). Kettering\\\\\\'s design, formally called the Kettering Aerial Torpedo but later known as the Kettering Bug, was built by the Dayton-Wright Airplane Company. Orville Wright acted as an aeronautical consultant on the project, while Elmer Ambrose Sperry designed the control and guidance system. A piloted development aircraft was built as the Dayton-Wright Bug.
The aircraft was powered by one 4-cylinder, 40-horsepower De Palma engine. The engine was mass-produced by the Ford Motor Company for about $40 each.[2] The fuselage was constructed of wood laminates and papier-mâché, while the wings were made of cardboard. The "Bug" could fly at a speed of 80 kilometres per hour (50 mph). The total cost of each Bug was $400.[1]
The Bug was launched using a dolly-and-track system, similar to the method used by the Wright Brothers when they made their first powered flights in 1903. Once launched, a small onboard gyroscope guided the aircraft to its destination. The control system used a pneumatic/vacuum system, an electric system and an aneroid barometer/altimeter.
To ensure the Bug hit its target, a mechanical system was devised that would track the aircraft\\\\\\'s distance flown. Before takeoff, technicians determined the distance to be traveled relative to the air, taking into account wind speed and direction along the flight path. This was used to calculate the total number of engine revolutions needed for the Bug to reach its destination. When a total revolution counter reached this value a cam dropped down which shut off the engine and retracted the bolts attaching the wings, which fell off. The Bug began a ballistic trajectory into the target; the impact detonated the payload of 82 kilograms (180 lb) of explosives.
The prototype Bug was completed and delivered to the Aviation Section of the U.S. Army Signal Corps in 1918, near the end of World War I. The first flight on October 2, 1918[3] was a failure: the plane climbed too steeply after takeoff, stalled and crashed.[4] Subsequent flights were successful, and the aircraft was demonstrated to Army personnel at Dayton.
"The Kettering Bug had 2 successes on 6 attempts at Dayton, 1 of 4 at Amityville, and 4 of 14 at Carlstrom."
Despite some successes during initial testing, the "Bug" was never used in combat. Officials worried about their reliability when carrying explosives over Allied troops. By the time the War ended about 45 Bugs had been produced. The aircraft and its technology remained a secret until World War II.
During the 1920s, what had become the U.S. Army Air Service continued to experiment with the aircraft until funding was withdrawn.
From April 1917 to March 1920 the US Government spent about $275,000 on the Kettering Bug
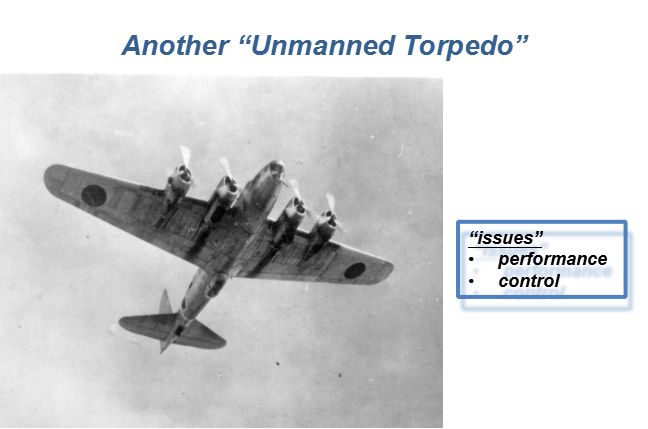
Aphrodite and Anvil were the World War II code names of United States Army Air Forces and United States Navy operations to use B-17 and PB4Y bombers as precision-guided munitions against bunkers and other hardened/reinforced enemy facilities such as those targeted during Operation Crossbow.
The plan called for B-17 aircraft which had been taken out of operational service – various nicknames existed such as "robot", "baby", "drone" or "weary Willy" – to be loaded to capacity with explosives, and flown by radio control into bomb-resistant fortifications such as German U-boat pens and V-weapon sites.
It was hoped that this would match the British success with Tallboy and Grand Slam ground penetration bombs but the project was dangerous, expensive and unsuccessful. Of 14 missions flown, none resulted in the successful destruction of a target. Many aircraft lost control and crashed, or were shot down by flak, and many pilots were killed. However, a handful of aircraft scored near misses. One notable pilot death was Joseph P. Kennedy, Jr., the elder brother of US President John F. Kennedy.
The program effectively ceased on January 27, 1945 when General Spaatz sent an urgent message to Doolittle "Aphrodite babies must not be launched against the enemy until further orders".
Old Boeing B-17 Flying Fortress bombers were stripped of all normal combat armament and all other non-essential gear (armor, guns, bomb racks, transceiver, seats, etc.), relieving about 12,000 lb (5,400 kg) of weight. To allow easier exit when the pilot and co-pilot were to parachute out, the canopy was removed. Azon[9] radio remote-control equipment was added, with two television cameras fitted in the cockpit to allow a view of both the ground and the main instrumentation panel to be transmitted back to an accompanying CQ-17 \\\\\\'mothership\\\\\\'. The drone was loaded with explosives weighing more than twice that of a B-17\\\\\\'s normal bomb payload. The British Torpex used for the purpose was itself 50% more powerful than TNT.
A relatively remote location in Norfolk, RAF Fersfield, was the launch site. Initially RAF Woodbridge had been selected for its long runway, but the possibility of the damaged aircraft that diverted to Woodbridge for landings colliding with a loaded drone caused concerns. The remote control system was insufficient for safe takeoff, so each drone was taken aloft by a volunteer pilot and a volunteer flight engineer to an altitude of 2,000 ft (600 m) for transfer of control to the CQ-17 operators. After successful turnover of control of the drone, the two-man crew would arm the payload and parachute out of the cockpit. The \\\\\\'mothership\\\\\\' would then direct the missile to the target.
When the training program was complete, the 562nd Squadron had ten drones and four "motherships".
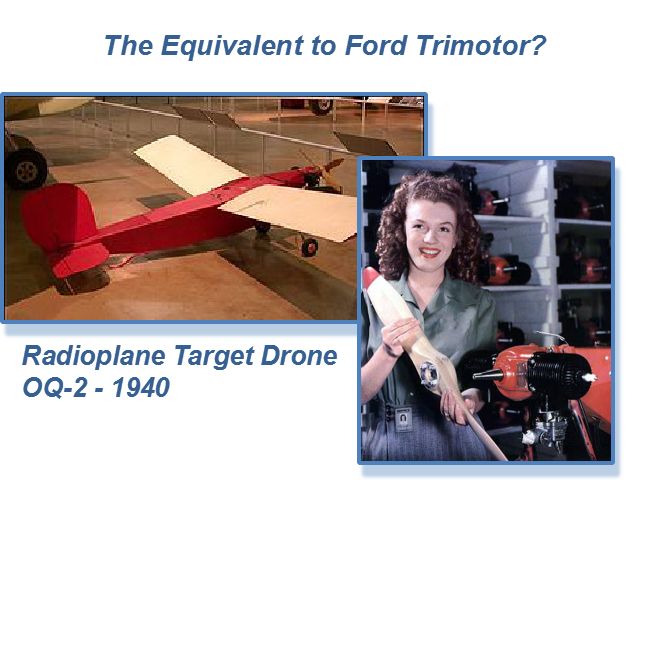
The OQ-2 Radioplane was the first mass-produced UAV or drone in the United States. A follow-on version, the OQ-3, became the most widely used target aircraft in US service, with over 9,400 being built during World War II.
The OQ-2 was originally a small radio controlled aircraft model designed by Walter Righter. The design, along with its engine design, was purchased by actor Reginald Denny, who had demonstrated another model to the US Army in 1940. Calling the new design the RP-2, he demonstrated several updated versions to the Army as the RP-2, RP-3 and RP-4 in 1939.
In 1940, the Army placed an order for 53 RP-4s, designating them the OQ-1, the OQ meaning a "subscale target". This small order led to a much bigger 1941 order for the similar RP-5, which became the US Army OQ-2. The US Navy also bought the drone, designating it TDD-1, for Target Drone, Denny, 1. Thousands were built, manufactured in a plant at the Van Nuys Airport in the Los Angeles metropolitan area.
It was at this factory on June 26, 1945 that Army photographer David Conover saw a young woman assembler named Norma Jeane Dougherty, whom he thought had potential as a model. She was photographed in the plant, which led to a screen test for Norma Jeane, who soon changed her name to Marilyn Monroe.
The OQ-2 was a simple aircraft, powered by a two-cylinder two-cycle piston engine, providing 6 horsepower (4.5 kW) and driving two contra-rotating propellers. The RC control system was built by Bendix. Launching was by catapult only and recovered by parachute should it survive the target practice. The landing gear was used only on the OQ-2 versions as sold to the Army to cushion the landing by parachute. None of the drones including the improved variants shipped to the Navy had landing gear. The subsequent variants delivered to the Army did not have landing gear.
The OQ-2 led to a series of similar but improved variants, with the OQ-3 / TDD-2 and OQ-14 / TDD-3 produced in quantity. A number of other target drones were built by Radioplane (including licensed contractors) and competing companies during the war, most of which never got beyond prototype stage, which accounts for the gaps in the designation sequence between "OQ-3" and "OQ-14".
After WWII ended, various experiment were made with Radioplane target drones. In one experiment in 1950, a derivative of the QQ-3 Radioplane drone was used to lay military communication wire.
During the war Radioplane manufactured nearly fifteen thousand drones. The company was bought by Northrop in 1952.

The Ryan Firebee was a series of target drones developed by the Ryan Aeronautical Company beginning in 1951. It was one of the first jet-propelled drones, and one of the most widely used target drones ever built。
The Firebee I was the result of a 1948 US Air Force request and contract to Ryan for a jet-powered gunnery target. The first flight of the XQ-2 Firebee prototype took place in early 1951. The drone featured swept flight surfaces and a circular nose inlet. The initial models had distinctive "arrowhead" shaped end plates on the tailplane. The Firebee could be air-launched, specially modified Douglas A-26 Invader bombers being first used; or ground-launched with a single RATO booster.
Following successful evaluation, the target was ordered into production for the USAF as the Q-2A, powered by a Continental J69-T-19B turbojet engine, with 1,060 pounds-force (4.7 kN) of thrust. The Air Force then obtained small numbers of a Q-2B with a more powerful engine for high-altitude performance.
The US Navy bought the Firebee as the KDA-1, with much the same appearance as the Q-2A, differing mainly in that the powerplant was a Fairchild J44-R-20B turbojet, with 1,000 lbf (4.4 kN) thrust. The KDA-1 could be distinguished from the Q-2A from the fact that the KDA-1 had an inlet centerbody. The US Army also obtained a version designated the XM21 that differed from the KDA-1 only in minor details.
The Navy obtained several improved variants of the KDA-1, including the XKDA-2 and XKDA-3, which were not built in quantity, and the KDA-4, which was the main production version for the series. These variants were hard to distinguish from the KDA-1, differing mainly in successively uprated J44 engines and minor changes.
In the late 1950s, the USAF awarded Ryan a contract for a substantially improved "second generation" Firebee, the Model 124, originally with the designation Q-2C. The initial prototype performed its first flight in late 1958 and went into production in 1960. In 1963, it was redesignated the BQM-34A.
The old first-generation KDA-1 and KDA-4 targets that were still flying with the Navy were then, somewhat confusingly, given the designations AQM-34B and AQM-34C respectively.
The BQM-34A emerged as the Firebee as it is recognized today, with a bigger airframe, longer wings, and in particular a "chin"-type inlet under a pointed nose, in contrast to the circular intake of the first-generation Firebees. It was powered by a Continental J69-T-29A turbojet, a copy of the improved Turbomeca Gourdon derivative of the Marbore, with 1,700 lbf (7.6 kN) thrust. The Navy also adopted the BQM-34A, while the Army obtained a ground-launched version designated MQM-34D, with longer wings and a heavier JATO booster.
One of the puzzling features of the second-generation Firebee is that some photos show it to have triangular end plates on the tailplane, while others show no end plates but feature a ventral fin under the tail, and still others have neither end plates nor ventral fin. Since most modern pictures of Firebees show the ventral fin, this may have been due to production changes of some sort. Sources are not clear on the issue.
In 1960, the first stealth technology development program was initiated by USAF, by reducing the radar-cross-section of a Q-2C drone. This was achieved through specially designed screens over the air intake, radar-absorbent material on the fuselage and a special radar-absorbing paint.
During the 1970s, the Army updated some of their MQM-34Ds for use as targets for "Stinger" man-portable SAMs, refitting these drones with a General Electric J85-GE-7 turbojet, with 10.9 kN (2,500 lbf) thrust and salvaged from old ADM-20C Quail decoys. The modified MQM-34Ds featured a revised forward fuselage with a circular nose intake that gave them an appearance something like that of a "stretched" first-generation Q-2A target, and were given the designation of MQM-34D Mod II.
In the meantime, the Navy upgraded their BQM-34As with improved avionics, which were then designated BQM-34S. In the early 1980s, the Navy also began to refit these with the uprated J69-T-41A engine, providing 1,920 lbf (8.5 kN) thrust. The Air Force began to update their BQM-34As with improved avionics, and fitted them with the J85-GE-7 engine. The new engine was fitted without major changes in the target\\\\\\'s airframe, and the improved USAF variants retained the BQM-34A designation.
BQM-34A production ended in 1982, but the production line was reopened in 1986 to produce more BQM-34S targets. Air Force and Navy Firebees have received further upgrades since that time, with most refitted beginning in 1989 with the improved J85-GE-100 engine, also with 2,450 lbf (10.9 kN) thrust, as well as modernized avionics. In the late 1990s, some Firebees were also fitted with a GPS navigation receivers.
USAF interest to develop a reconnaissance RPV variant of the BQM-34A Firebee target emerged in 1961, when Ryan was instructed to convert a BQM-34A drone to reconnaissance RPV configuration under Project "Fire Fly". The result was the Model 147A, which first flew in April 1962. The 147A differed from the standard BQM-34A by a new navigation system and increased fuel, but was externally essentially identical. The 147A, like all early Model 147 variants, used the same J69-T-29 engine as the BQM-34A, and were likewise recovered by a two-stage parachute descent system. The Lockheed DC-130 Hercules was generally used as launch aircraft for the Model 147 drones.
The Model 147A tests were successful, and led to a long line of more extensive modifications, and most of the RPVs were used operationally over South-East Asia. Initially, no designations were assigned to Model 147 versions by the USAF. From 1969, however, the Air Force allocated AQM-34 designations with variuos suffix letters to the RPVs. Those models which were no longer in use at that time did never receive an AQM designation.
The Model 147B was the first high-altitude photo-reconnaissance RPV variant. It had a longer fuselage for additional fuel and payload, and its wingspan was more than doubled. It was used operationally between 1964 and 1965.
The 147C was a "short-wing" variant with only slightly larger wings than the 147A, and was used as a test and training model. The 147D was a modified 147C with an ELINT (Electronic Intelligence) payload of the CIA. The 147E combined the "big-wing" airframe of the 147B (with a slightly modified nose) with the ELINT payload of the 147D, and the 147F was a modified 147B used by the U.S. Navy as a testbed for the AN/ALQ-51 multi-band deception jammer and track breaker.
The 147G was a development of the 147B with a longer fuselage and a more powerful J69-T-41A engine. It had a zoom-lens equipped TV camera in the nose, together with a TV transmitter for real-time surveillance. Some 147Gs were later modified to 147J standard (q.v.), and one 147G was converted to XQM-103A configuration.
The Model 147H (later designated AQM-34N) was a special high-altitude reconnaissance version with an even larger wing than the 147B family. It had a span of 9.75 m (32 ft) and a wing area of 10.6 m² (114 sq ft) compared to 3.93 m/3.34 m² (12.9 ft/36 sq ft) of the 147A.
The 147J was a low-altitude photo-reconnaissance version of the 147G featuring a barometric altitude control system. With the 147J, a new recovery method was introduced. Helicopters equipped with MARS (Mid-Air Retrieval System) could "snatch" the drones floating down on their parachutes in mid-air and carry them back to the operating base. Retrieval was much quicker this way, and limited damage to the drone by impact in rugged terrain.
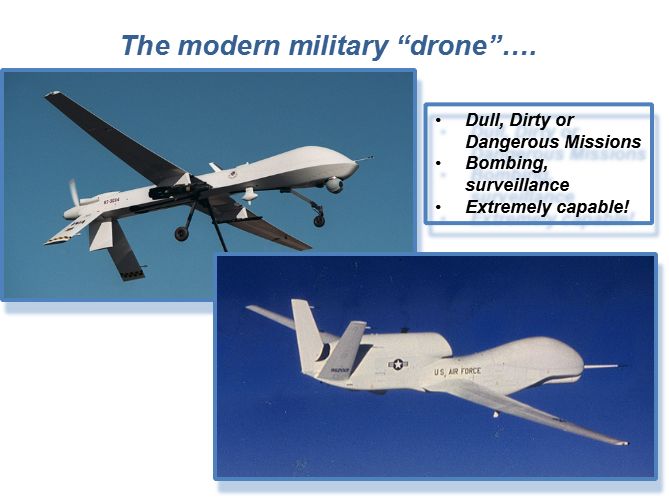
The General Atomics MQ-1 Predator is an unmanned aerial vehicle (UAV) built by General Atomics and used primarily by the United States Air Force (USAF) and Central Intelligence Agency (CIA). Initially conceived in the early 1990s for aerial reconnaissance and forward observation roles, the Predator carries cameras and other sensors but has been modified and upgraded to carry and fire two AGM-114 Hellfire missiles or other munitions (Unmanned combat aerial vehicle). The aircraft, in use since 1995, has seen combat over Afghanistan, Pakistan, Bosnia, Serbia, Iraq, Yemen, Libya, Syria, and Somalia.
The USAF describes the Predator as a "Tier II" MALE UAS (medium-altitude, long-endurance unmanned aircraft system). The UAS consists of four aircraft or "air vehicles" with sensors, a ground control station (GCS), and a primary satellite link communication suite.[4] Powered by a Rotax engine and driven by a propeller, the air vehicle can fly up to 400 nmi (460 mi; 740 km) to a target, loiter overhead for 14 hours, then return to its base.
Following 2001, the RQ-1 Predator became the primary unmanned aircraft used for offensive operations by the USAF and the CIA in Afghanistan and the Pakistani tribal areas; it has also been deployed elsewhere. Because offensive uses of the Predator are classified, U.S. military officials have reported an appreciation for the intelligence and reconnaissance-gathering abilities of UAVs but declined to publicly discuss their offensive use.[5]
Civilian applications have included border enforcement and scientific studies, and to monitor wind direction and other characteristics of large forest fires (such as the one that was used by the California Air National Guard in the August 2013 Rim Fire).
The Northrop Grumman RQ-4 Global Hawk is an unmanned (UAV) surveillance aircraft. First flight in 1998. It was initially designed by Ryan Aeronautical (now part of Northrop Grumman), and known as Tier II+ during development. The Global Hawk performs a similar role as the Lockheed U-2. The RQ-4 provides a broad overview and systematic surveillance using high-resolution synthetic aperture radar (SAR) and long-range electro-optical/infrared (EO/IR) sensors with long loiter times over target areas. It can survey as much as 40,000 square miles (100,000 km2) of terrain a day.
The Global Hawk is operated by the United States Air Force. It is used as a high-altitude platform covering the spectrum of intelligence collection capability to support forces in worldwide military operations. According to the United States Air Force, the superior surveillance capabilities of the aircraft allow more precise weapons targeting and better protection of friendly forces. Cost overruns led to the original plan to acquire 63 aircraft being cut to 45, and to a 2013 proposal to mothball the 21 Block 30 signals intelligence variants.[1] Each aircraft was to cost US$60.9 million in 2001,[2] but this had risen to $222.7 million per aircraft (including development costs) by 2013.[1] The U.S. Navy has developed the Global Hawk into the MQ-4C Triton maritime surveillance platform.
Estimated to cost 28K $ /hour of flight






- The End -
声明:欢迎转发本号原创内容,转载和摘编需经本号授权并标注原作者和信息来源为云脑智库。本公众号目前所载内容为本公众号原创、网络转载或根据非密公开性信息资料编辑整理,相关内容仅供参考及学习交流使用。由于部分文字、图片等来源于互联网,无法核实真实出处,如涉及相关争议,请跟我们联系。我们致力于保护作者知识产权或作品版权,本公众号所载内容的知识产权或作品版权归原作者所有。本公众号拥有对此声明的最终解释权。
投稿/招聘/推广/合作/入群/赞助 请加微信:15881101905,备注关键词

微群关键词:天线、射频微波、雷达通信电子战、芯片半导体、信号处理、软件无线电、测试制造、相控阵、EDA仿真、通导遥、学术前沿、知识服务、合作投资.
“阅读是一种习惯,分享是一种美德,我们是一群专业、有态度的知识传播者.”
↓↓↓ 戳“阅读原文”,加入“知识星球”,发现更多精彩内容.
/// 先别走,安排点个“赞”和“在看” 吧!↓↓↓
