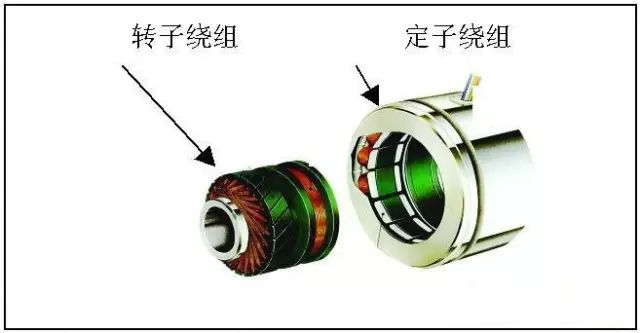
旋转变压器是一种输出电压与转子转角保持一定函数关系的感应式微电机。它是一种将角位移转换为电信号的位移传感器,也是能进行坐标换算和函数运算的解算元件。

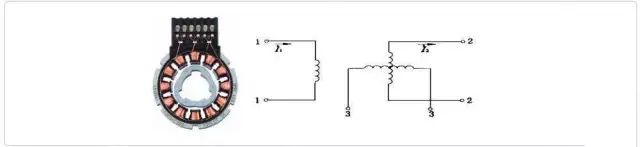
它由定子和转子组成。其中定子绕组作为变压器的原边,接受励磁电压,转子绕组作为变压器的副边,通过电磁耦合得到感应电压。
旋转变压器的历史及发展
旋转变压器是目前国内的专业名称,简称“旋变” 。有人把它称作为“解算器”或“分解器”。
旋转变压器用于运动伺服控制系统中,作为角度位置的传感和测量用。早期的旋转变压器用于计算解答装置中,作为模拟计算机中的主要组成部分之一。
其输出,是随转子转角作某种函数变化的电气信号,通常是正弦、余弦、线性等。这些函数是最常见的,也是容易实现的。在对绕组做专门设计时,也可产生某些特殊函数的电气输出。但这样的函数只用于特殊的场合,不是通用的。
60年代起,旋转变压器逐渐用于伺服系统,作为角度信号的产生和检测元件。三线的三相的自整角机,早于四线的两相旋转变压器应用于系统中。
所以作为角度信号传输的旋转变压器,有时被称作四线自整角机。随着电子技术和数字计算技术的发展,数字式计算机早已代替了模拟式计算机。所以实际上,旋转变压器目前主要是用于角度位置伺服控制系统中。
由于两相的旋转变压器比自整角机更容易提高精度,所以旋转变压器应用的更广泛。特别是,在高精度的双通道、双速系统中,广泛应用的多极电气元件,原来采用的是多极自整角机,现在基本上都是采用多极旋转变压器。
早期的旋转变压器,由于信号处理电路比较复杂,价格比较贵的原因,应用受到了限制。但因为旋转变压器具有无可比拟的可靠性,以及具有足够高的精度,在许多场合有着不可代替的地位,特别是在军事以及航天、航空、航海等方面。

随着电子工业的发展,电子元器件集成化程度的提高,元器件的价格大大下降;另外,信号处理技术的进步,旋转变压器的信号处理电路变得简单、可靠,价格也大大下降。而且,又出现了软件解码的信号处理,使得信号处理问题变得更加灵活、方便。这样,旋转变压器的应用得到了更大的发展,其优点得到了更大的体现。
旋转变压器的工作原理
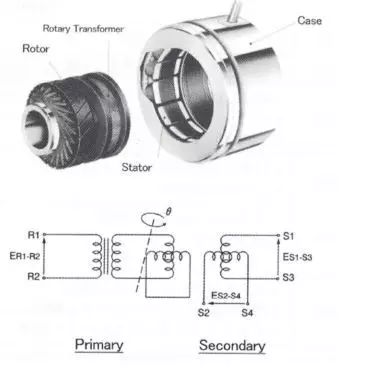
旋转变压器的本质是一个变压器。关键参数也与变压器类似,比如额定电压、额定频率、变压比。
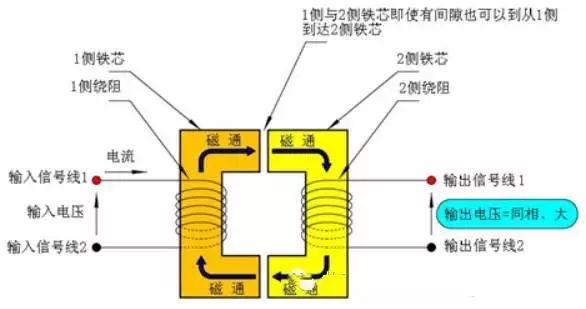
与变压器不同之处是,它的一次侧与二次侧不是固定安装的,而是有相对运动。随着两者相对角度的变化,在输出侧就可以得到幅值变化的波形。
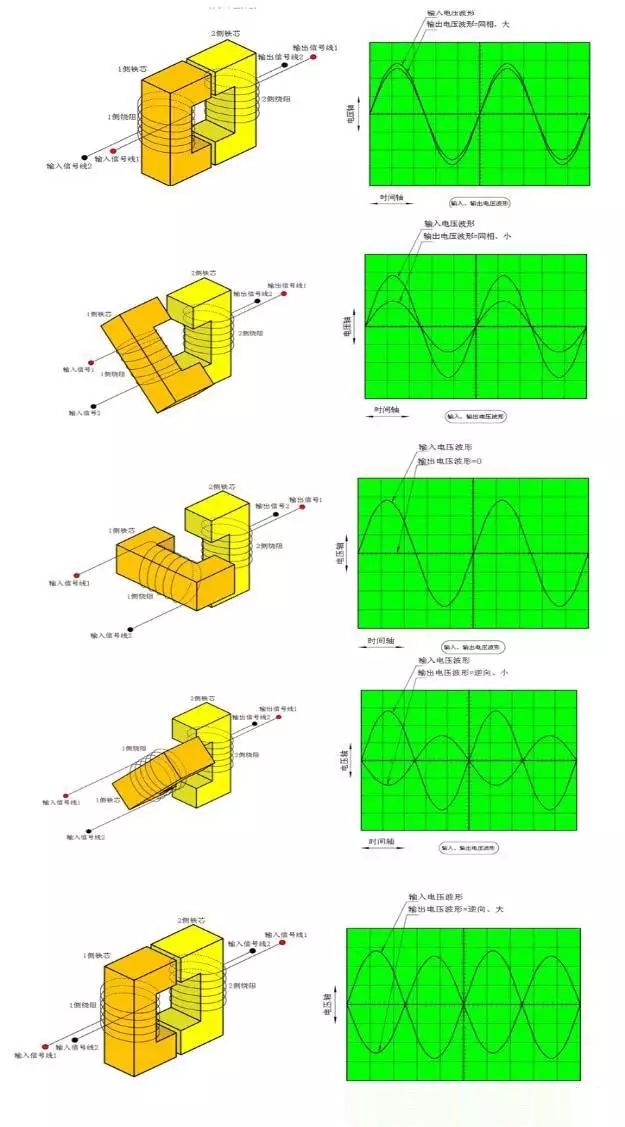
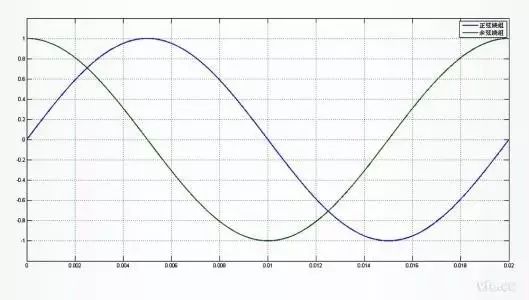
旋变就是基于以上原理设计的:输出信号幅值随位置变化而变化,但频率不变。旋变在实际应用中,设置了两组输出线圈,两者相位差90度,从而可以输出幅值为SIN与COS变化的两组信号。
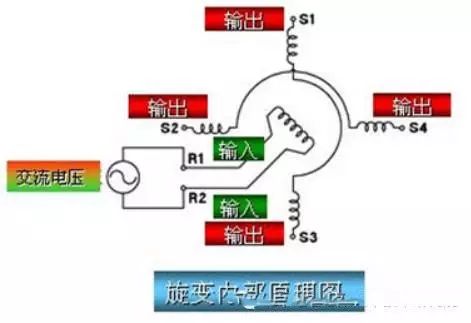
利用两台相同的正、余弦旋转变压器可组成单通道测角系统。一台旋转变压器为发送机,另一台为控制变压器。发送机由交流电源激磁。旋转变压器的精度为6′,单通道系统的精度不小于6′。为了提高系统的控制精度,可采用双通道测角系统。
用四台结构相同的旋转变压器,两台XZ1与XZ2组成粗通道测角系统,另外两台XZ3与XZ4组成精通道测角系统。XZ1与XZ3、XZ2与XZ4分别通过升速比为i(i=15~30)的升速器相连接。
当主令轴带动粗通道的XZ1转过θ1角时,精通道的XZ3将转过iθ1角,XZ2与负载同轴,其转角为θ2时,XZ4的转角为iθ2.粗通道的输出电压Uc1=kUr sinδ,精通道XZ4的输出电压为Uc2=kUrsiniδ,式中δ=θ1-θ2.二者的输出电压经过粗精转换器处理后再经放大装置驱动负载。
应用双通道测角系统可组成双通道伺服系统,当误差角δ较小时用精通道信号控制,误差角δ较大时用粗通道信号控制。
因此系统的控制精度最高可达3″~7″。为了减少减速器齿轮间隙造成的非线性误差,可采用电气变速式双通道测角系统,即采用多极旋转变压器。
它是在一个机体内安装单极和多极两台旋转变压器,而共用一根轴。用单极变压器组成粗通道系统,多极旋转变压器组成精通道系统。这样既能提高精度又能简化结构。
旋转变压器的种类
旋转变压器一般结构类似于绕线型电动机,从不同的角度进行划分可得到不同的旋转变压器种类或名称。
按用途的差异可分为计算用旋转变压器和数据传输用旋转变压器;按输出电压的转子转角之间的函数关系差异可分为止弦旋转变压器、线性旋转变压器和比例式旋转变压器等;按旋转变压器在由其构造的转角运算或相关变换及信号传输系统中的相对位置关系及具体作用可分为旋变发送机、旋变差动发送机和旋变变压器等。
另外,也可按结构差异将旋转变压器分为接触式和无接触式(有无滑环电刷结构);按转子旋转角度限制义可分为有限转角和无限转角两种类型;按极对数差异又可分为单对极和多对极旋转变压器。
旋转变压器的结构
有刷式旋转变压器
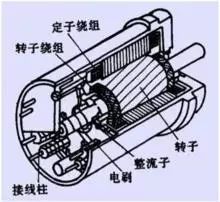
它的转子绕组通过滑环和电刷直接引出,其特点是结构简单,体积小,但因电刷与滑环是机械滑动接触的,所以旋转变压器的可靠性差,寿命也较短,目前这种结构形式的旋转变压器应用的很少,我们着重于介绍无刷旋转变压器。。
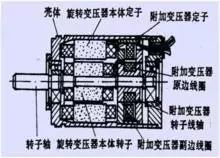
无刷式旋转变压器
它分为两大部分,即旋转变压器本体和附加变压器。附加变压器的原、副边铁心及其线圈均成环形,分别固定于转子轴和壳体上,径向留有一定的间隙。
旋转变压器本体的转子绕组与附加变压器原边线圈连在一起,在附加变压器原边线圈中的电信号,即转子绕组中的电信号,通过电磁耦合,经附加变压器副边线圈间接地送出去。
这种结构避免了电刷与滑环之间的不良接触造成的影响,提高了旋转变压器的可靠性及使用寿命,但其体积、质量、成本均有所增加。
目前无刷旋转变压器有两种结构形式。一种称作为环形变压器式无刷旋转变压器,另一种称作为磁阻式旋转变压器。
环形变压器式旋转变压器
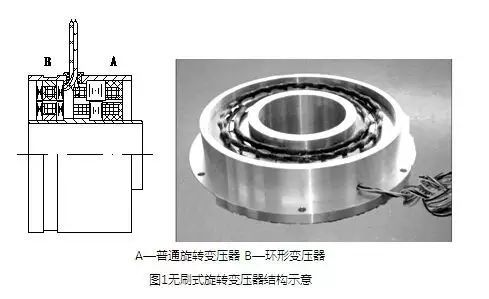
这种结构很好地实现了无刷、无接触。图中右侧部分是典型的旋转变压器的定、转子,在结构上和有刷旋转变压器一样的定、转子绕组,作信号变换。左侧是环形变压器。它的一个绕组在定子上,一个在转子上,同心放置。
转子上的环形变压器绕组和作信号变换的转子绕组相联,它的电信号的输入输出 由环形变压器完成。
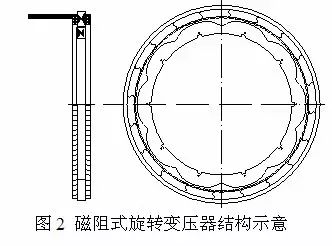
磁阻式旋转变压器
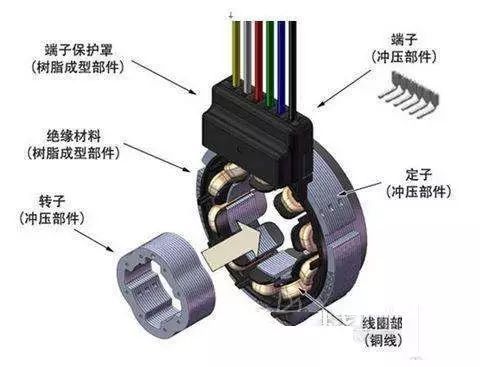
磁阻式旋转变压器的励磁绕组和输出绕组放在同一套定子槽内,固定不动。但励磁绕组和输出绕组的形式不一样。两相绕组的输出信号,仍然应该是随转角作正弦变化、彼此相差90°电角度的电信号。
转子磁极形状作特殊设计,使得气隙磁场近似于正弦形。转子形状的设计也必须满足所要求的极数。可以看出,转子的形状决定了极对数和气隙磁场的形状。
磁阻式旋转变压器一般都做成分装式,不组合在一起,以分装形式提供给用户,由用户自己组装配合。
旋转变压器的主要参数和性能指标
零位电压
旋转变压器的输出绕组中感应电压最小时,转子位置就是电气零位,输出电压就是零位电压。零位电压也称剩余电压。
理想的旋转变压器的零位电压等于零。实际则因为绕组分布误差、交轴不是严格正交、导磁材料磁导率不均匀、磁路不对称、干扰等因数的存在,旋转变压器零位电压一般不为零,零位电压通常应小于最大输出电压的0.1%,而其基波电压通常有较大的占比,准确测量零位电压是评价旋转变压器的一个重要环节。
相位移
相位移是指励磁电压与输出电压的基波分量之间的相位差。旋转变压器相位移通常超前,对于控制系统而言,相对固定的相位移是可以接受的,但是,较大的、并且不稳定的相位移则是不允许的。
一般而言,随着基座号的上升、励磁频率的上升,相位移随之减小。随着温度的上升,绕组电阻变大,相位移也会变大。
在控制系统中,许多时候,把相位移或相位移的变化控制在一定的范围内,是非常有必要的。
变压比
旋转变压器的变压比与静止变压器的变比含义相同,但是,旋转变压器在不同转角时,磁场耦合程度不同,输出电压不同。因此,旋转变压器的变压比是指在规定励磁条件下,最大空载输出电压的基波分量与励磁电压的基波分量之比。
旋转变压器的上述特点,给其变压比测量带来了一定的困难。
变压比是旋转变压器的基本技术指标,一般在铭牌中标称。

开路输入阻抗
旋转变压器的技术指标中,在铭牌上标称的指标一般只有两个,一个是变压比,另一个就是开路输入阻抗。
旋转变压器的开路输入阻抗一般在200Ω~10kΩ之间。
线性误差

线性误差是指线性旋转变压器在工作角度范围内仍一转子位置时的实际输出电压与理论输出电压的偏差。
式中:
δ1——线性误差;
Uθ’——在转子角度为θ时所测得的输出电压基波同相(与最大输出电压同相)分量;
Uθ——在转子角度为θ时输出电压基波同相(与最大输出电压同相)分量的理论值;
U60——在转子角度为60°时输出电压基波分量的理论值。
电气误差
电气误差是指转子实际电气角度与通过输出测量计算获得的电气角度的偏差。一般不超过12′。
交轴误差
原边绕组轮流励磁(剩下绕组短路),转动转子,分别测得转子理论角度为0°、90°、180°、270°时的电气误差,按要求取这些电气误差的代数差,绝对值最大的差值为交轴误差。
旋转变压器与编码器的区别
旋转变压器是一种输出电压随转子转角变化的信号元件。是采用电磁感应原理工作,随着旋转变压器的转子和定子角位置不同,输出信号可以实现对输入正弦载波信号的相位变换和幅值调制,最终由专用的信号处理电路或者某些具备一定功能接口的DSP和单片机,根据输出信号的幅值和相位与正弦载波信号的关系,解析出转子和定子间的角位置关系。
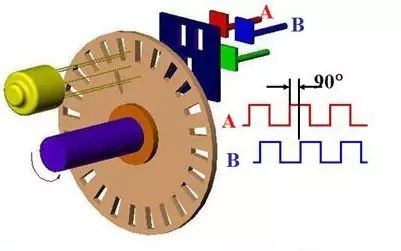
典型的旋转编码器采用光栅原理,用光电方法进行角位置检测,又可分为增量式和绝对式等类型。
旋转变压器和编码器的主要区别如下:
1、编码器更精确采用的是脉冲计数;旋转变压器就不是脉冲计数, 而是模拟量反馈。
2、编码器多是方波输出的,旋转变压器是正余弦的,通过芯片解算出相位差。
3、旋转变压器的转速比较高,可以达到上万转,编码器就没那么高了。
4、旋转变压器的应用环境温度是-55℃到+155℃,编码器是-10℃到+70℃。
5、旋转变压器一般是增量的。
两者根本区别在于:数字信号和模拟正弦或余弦信号的的区别。
制造业的未来是智能化,智能化的基础就是传感器;互联网的方向是物联网,物联网的基石也是传感器;
【点击蓝色标题,获取文章】
1、一文读懂MEMS传感器
2、一文读懂接近传感器
3、一文读懂磁传感器
4、一文读懂流量传感器
5、一文读懂压力传感器的原理及分类
6、一文读懂加速度传感器
7、一文读懂超声波传感器
8、一文读懂位移传感器
9、一文读懂光电传感器
10、一文读懂光纤传感器
11、一文读懂温湿度传感器
12、一文读懂图像传感器
13、一文读懂生物传感器
14、一文读懂霍尔传感器
15、一文读懂距离传感器
16、一文读懂氧传感器
17、一文读懂风向风速传感器
18、一文读懂纳米传感器
19、一文读懂红外传感器
21、一文读懂气体传感器
23、汽车传感器今日谈
24、一文读懂手机传感器
25、一文读懂医疗传感器
26、一文读懂化学传感器
27、一文读懂角速度传感器(陀螺仪)
28、一文读懂换能器
29、一文读懂旋转编码器
30、一文读懂变速器
31、一文读懂振动传感器
32、一文读懂电容传感器
33、一文读懂电涡流传感器
34、一文读懂电感式传感器
35、一文读懂光栅传感器
36、一文读懂压电式传感器
37、一文读懂烟雾传感器
38、一文读懂电阻式传感器
39、无线网路传感器详解
40、MEMS传感器市场状况及主要厂商
41、图像传感器的市场状况和主要厂商
42、气体传感器的市场状况及主要厂商
43、指纹传感器的市场状况和主要厂商
44、汽车MEMS传感器的市场状况和主要厂商

为您发布产品,请点击“阅读原文”

