当只有一个节点正在传输比特时,CAN FD 协议引入了在数据阶段使用的第二比特率。网络中的所有其他节点都是接收器。这意味着不需要同步。数据阶段的位时间设置类似于仲裁阶段,用户需要配置Tq、SYNC 段和采样点。ISO 11898-1: 2015 仅提供位时间设置的框架,例如在所有节点中使用相同的振荡器频率。为了使量化误差尽可能小,建议对两种比特率使用相等的时间量程长度。ISO 11898-1 包含一些公式,用于计算给定数据相位比特率下允许的最大振荡器频率容差。当数据相位比特率和仲裁比特率的比率较低(例如 6:1)时,经典 CAN 振荡器容限就足够了。对于更高的比率,需要使用参考公式计算误差。
此外还有一些其他额外的收发器参数需要考虑。 跟网络拓扑和收发器特性引起的位宽变化是相关的。位宽变化受CAN 控制器(通常集成在微控制器中)和 CAN 收发器之间的接口、CAN 收发器本身(发送和接收的不对称性)以及取决于所选网络拓扑和所选组件(例如电缆和连接器等)阻抗等影响。
ISO 11898-2标准2016版(合并了原有的ISO 11898-2、-5和-6标准)规定了收发器特性。这里有三个新的参数:TXD-RXD的环路延迟、TX延迟和RX延迟。图1为TJA1045收发器循环延时对称时序图(tPD(TXD-RXD)为TXD发送显性上升/下降沿到总线并且反馈到RXD的延时,称之为环路延迟)。TX延时和RX延迟的对称性对于发射节点是很重要的,其中隐性到显性边缘测量为 30%,显性到隐性边缘测量为 70%。最关键的情况是五个显性位后的隐性位,如果收发器是非对称的,则隐性位时间相对于标称位时间缩短或扩展。因此,ISO 11898-2:20 06标准指定了隐性位的最小值和最大值,如图2所示。给出了总线(CAN_H和CAN_L)上的网络负载60 Ω和100 pF的值。
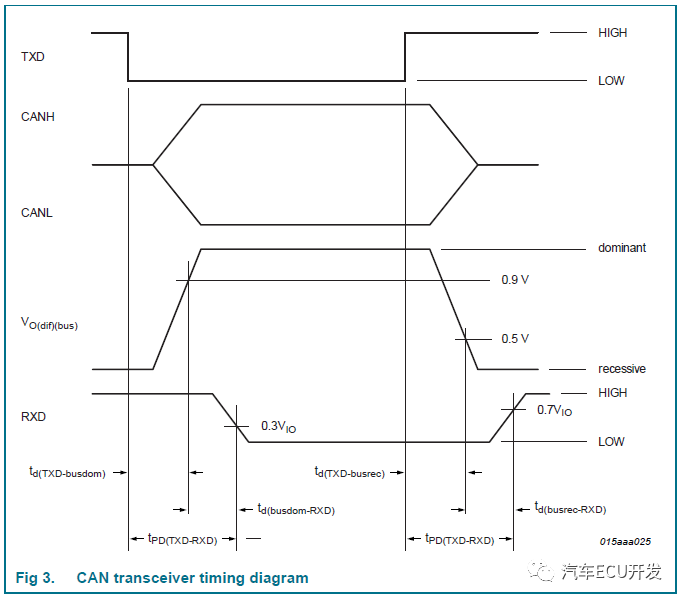
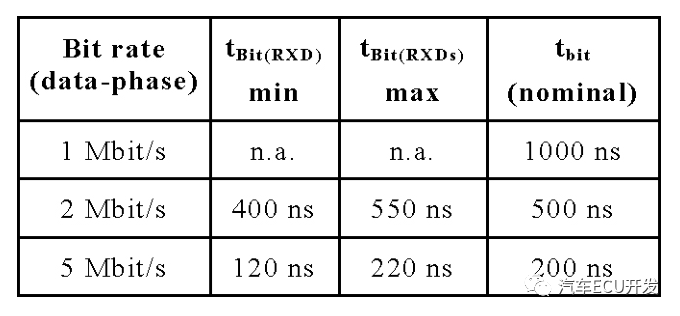
图2 环路延迟对称性(来源:ISO 11898-2-2016)
标准中允许发送端电源电压、网络负载和温度引起的这种不对称。从发送端来看,需要将下降沿和上升沿的转换率控制在给定比特率下可能的最低值。 图3显示了 ISO 11898-2:2016 中针对 60 Ω 和 100 pF 总线(CAN_H 和 CAN_L)上的网络负载的指定值。
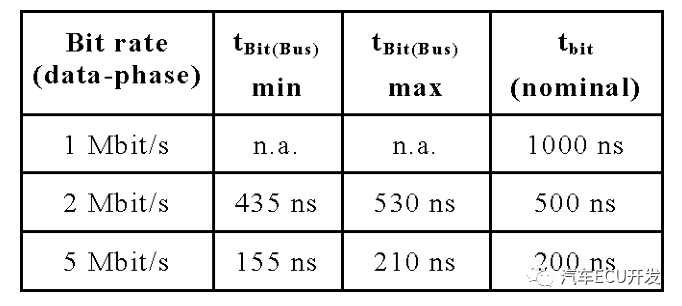
图3 收发器Tx延迟(来源ISO 11898-2-2016)
收发器RX延迟取决于产品差异、温度变化、接收器阈值、电源电压变化和压摆率。图4中给出RX延时的计算值。ΔtRec (min) 值缩短了隐性位长,而 ΔtRec (max) 值延长了隐性位长。
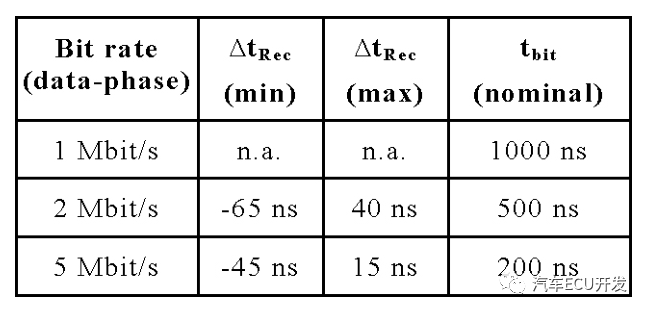
图4 收发器RX延时(来源ISO 11898-2-2016)
图5显示了发送节点的 TxD 信号、总线差分电压和接收节点 RxD 引脚上可能的隐性位持续时间之间的影响。

图5 接收节点RxD引脚上升边的抖动
除了使用符合 ISO 11898-2: 2016 的 CAN 收发器外,CiA 601-1 规范还提供了有关 CAN FD 可连接电子控制单元 (ECU) 设计的进一步提示和评论。图 6展示了一个典型的通信网络,其中包含一个发送节点、一个接收节点和其间的线路。RxD 信号在接收节点上的对称性由发送和接收节点的对称性能来定义。为了保证网络中两个或多个节点之间的稳健通信,发送节点的收发器 Tx 延迟对称性和接收节点的收发器 Rx 延迟对称性必须非常准确。环路延迟对称性不能完全涵盖这一点。可能是网络中的一个 ECU 的收发器,其中包含一个非常对称的发送端和一个不对称的接收端,来自其他供应商的收发器的行为可能反之。因此,在 CiA 601-1 中为发送端和接收端对称性定义了附加参数。
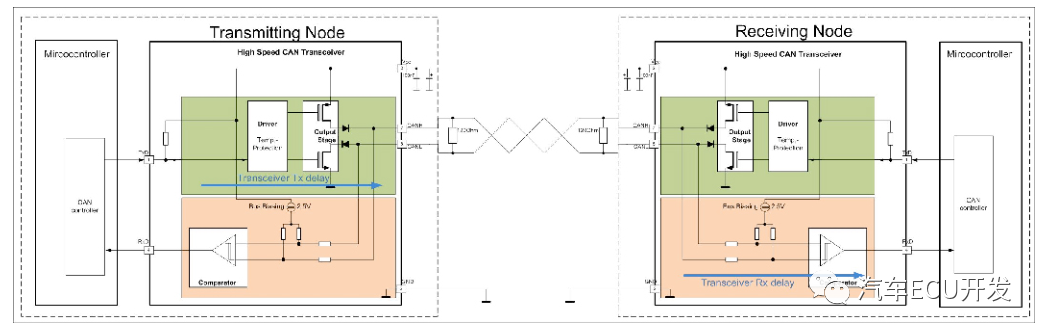
图6 CAN FD网络中的重要延迟(来源:CiA 601-1)
图7给出了接收节点看到的隐性位长度的结果最小值和最大值。它们适用于 60-Ω 和 100-pF 总线负载。文档的这一部分未考虑以下影响,但在 CiA 601-4 规范(尚未发布)中考虑:网络本身的行为,例如显性到隐性转换的振铃或附加传播延迟,以及时钟容差。
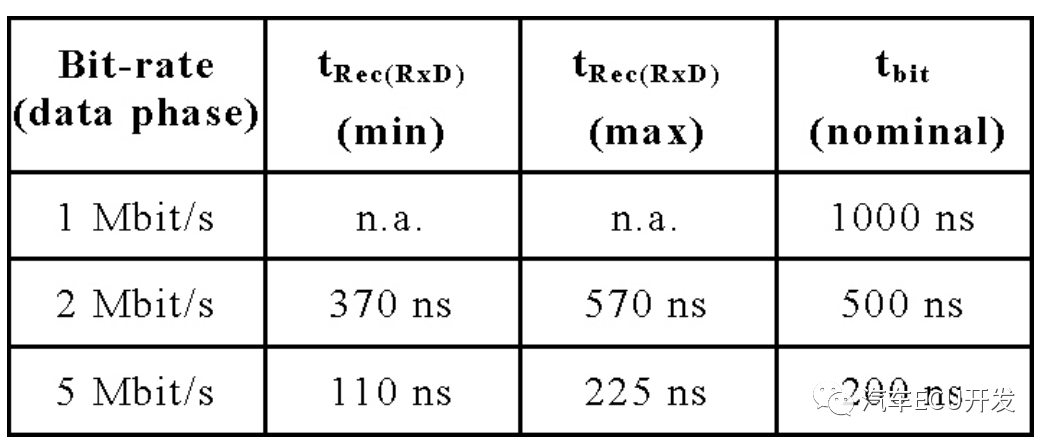
图7 接收节点RxD引脚的隐性位时间(来源:CiA 601-1)
数据段的采样点与仲裁段的采样点没有关系。该设置取决于传输节点延迟 (TD)。TD 是从 CAN 控制器的发送触发器 (FF) 到其接收触发器的延迟。这意味着当 CAN 控制器发送一个位时,该位在 TD 之后出现在 CAN 控制器的输入端。此 TD 是以下延迟的总和:
1、从CAN控制器Tx-FF输出到TxD微控制器端口的传播延迟;
2、TxD微控制器端口到TxD收发端口的传播延迟;
3、收发环路延迟TxD到RxD;
4、RxD收发器端口到RxD微控制器端口的传播延迟;
5、从RxD微控制器端口到CAN控制器Rx-FF输出的传播延迟;
6、电流隔离设备的传播延迟(如果可用)。
如果在收发器和微控制器之间的接口上有任何额外的元件,则延迟会增加。在较高的比特率下,发送节点应补偿TD,以便能够将其发送的比特与CAN网络上的当前比特进行比较。发送节点中允许补偿TD的特性称为发送节点延迟补偿(TDC)。TD不影响接收节点。
在收发器的RxD引脚上观察到的隐性到显性边相当稳定,但显性到隐性边可以移位。CAN收发器与CAN控制器之间的器件对边缘稳定性的影响较小。因此,TD的测量是在隐性到显性边缘进行的。在TDC功能被启用的情况下,一个CAN控制器作为发送节点,基于从FDF位到RES位的隐性到显性边缘测量TD。它在每个使用比特率交换的FD帧内执行一次测量。CAN控制器在二次采样点(SSP)比较其发送位和接收位。
图8展示了有和没有 TDC 的示例隐性位的采样。如果 TD 没有得到补偿,发送节点会认为是位错误,因为它检测到显性位电平而不是隐性位电平。如果启用 TDC,它会检测正确的位状态(隐性)。相位裕度(位的彩色部分)由多种影响引起:量化误差、振荡器容差引起的移位、上述物理层组件引起的位不对称以及总线上振铃引起的 RX 信号不稳定通过阻抗不匹配。前两种效应取决于比特率,而另外两种效应不依赖于比特率。
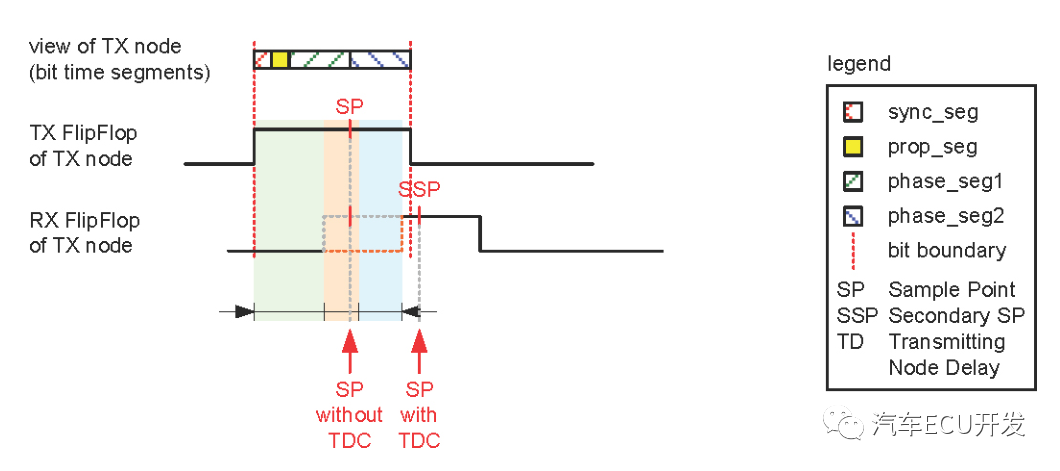
图8 在发送节点对隐性位进行采样(仅在TDC下工作)
位不对称不仅是由收发器引起的,而且也是由所有其他物理层组件引起的。这还包括CAN-FD控制器中的状态机与收发机之间交换的信号。它们受到控制器芯片的输入/输出开关焊盘和PCB(印刷电路板)电容的影响。对于发送节点和接收节点,这方面的典型值为10ns。此外,所选择的拓扑可能导致比特不对称,这不包括在收发机不对称值中。
如果采样点在相位裕度内,则必须使用 ISO 11898-1: 2015 中定义的二次采样点 (SSP)。建议配置 SSP,使其位于剩余位的中间(这是相位裕度 A 之后和相位裕度 B 之前的时间)。
另一个关键点是总线上的反射。它可以通过使用带有非常短的支线(菊花链)的总线拓扑来减少,或者是专用电路也可以减少反射。一种选择是 CiA 601-4 [3] 中提出的反射抑制电路 (RSC)。RSC 动态调整网络总阻抗。它降低了配置时间内的阻抗。最关键的节点需要配备这样的电路。RSC可以集成在CAN收发器芯片中。
浅谈车载控制器产线EOL实现方式
详解汽车Bootloader设计
特斯拉Autopilot系统安全研究|附dbc下载
详解功能安全概念阶段
详细揭秘大众ID.4的高压系统
特斯拉Model 3的BMS系统
结合AUTOSAR和DDS实现灵活的车辆架构
