今年3月份,艾迈斯半导体与欧司朗的合并动作正式完成,这项业内瞩目的合并自带流量。整个业界都在关心这项合并背后有着怎样的逻辑?合并后的新集团在诸多产业革新,例如未来智能驾驶领域又将给业界带来怎样的支持?艾迈斯欧司朗市场与业务发展总监金安敏先生通过《先进光学技术赋能未来智能驾驶》的主题演讲在“EEVIA第九届年度中国电子ICT媒体论坛暨2021产业和技术展望研讨会”上为大家一一解答。

艾迈斯欧司朗市场与业务发展总监金安敏先生
作为全球光学解决方案的领导者,合并后的艾迈斯欧司朗自身拥有超过110年的发展历史。而这样一家“百年老店”,它合并背后有着怎样的基本逻辑?金安敏在演讲开篇就展开了剖析。
首先,业务分布更加均衡。合并前,欧司朗在汽车行业深耕多年,聚焦光源技术,艾迈斯半导体则在消费电子领域颇有建树,而合并后的艾迈斯欧司朗在业务分布上将更加均衡,形成60%/40%的均衡业务占比。60%的业务比重是汽车、工业、医疗业务,合起来叫AIM业务,其余40%比重是消费业务。在消费、汽车、工业等行业的平衡布局,也让艾迈斯欧司朗呈现更稳健的发展格局。

金安敏梳理艾迈斯欧司朗概览
其次,优势产品完美互补,自成闭环光学系统。金安敏介绍在整个光学系统中,核心技术无非在4个方面:发射器、光学元器件+微型模组、探测器以及相应的算法和软件。合并前,艾迈斯半导体更多专注于传感器和光学元器件,此外,在定制电路以及特定算法上也有较多积累,欧司朗则更聚焦于发射器,例如LED、在激光雷达里面会广泛使用的边发射EEL以及传统光源。合并后的艾迈斯欧司朗则能为客户提供整个光学系统的所有部件,在产品/技术层形成了一个完整的闭环。

4大技术支柱实现3大光学功能
未来,艾迈斯欧司朗将进一步利用这4大技术支柱,实现光学方面的3大功能:传感、光源以及可视化,并支撑包括移动设备、可穿戴、工业、医疗、汽车、照明等在内的多元行业应用,进一步增强自身在光学解决方案领域无可争议的全球领导者地位。

艾迈斯欧司朗业务领域布局
现阶段,汽车的电动化已经取得了阶段性的进展,因此业界也将网联化、智能化放到更加重要的位置。在谈及对实现自动驾驶至关重要的激光雷达时,金安敏也坦言就硬件而言,激光雷达是最后还未啃下的一块“骨头”。
不同于车载摄像头和毫米波雷达在当前整车的大量应用,激光雷达还因成本问题,没有迎来装车的爆发期。
但金安敏也直言得益于国内造车新势力对激光雷达应用的激进推进以及传统车厂的积极跟进,预计在未来3~5年时间,激光雷达可以实现规模化应用。回归激光雷达本身,艾迈斯欧司朗本身具有非常核心的光源技术,可以给予激光雷达加速降低成本、尽快上车极其核心的技术支持。
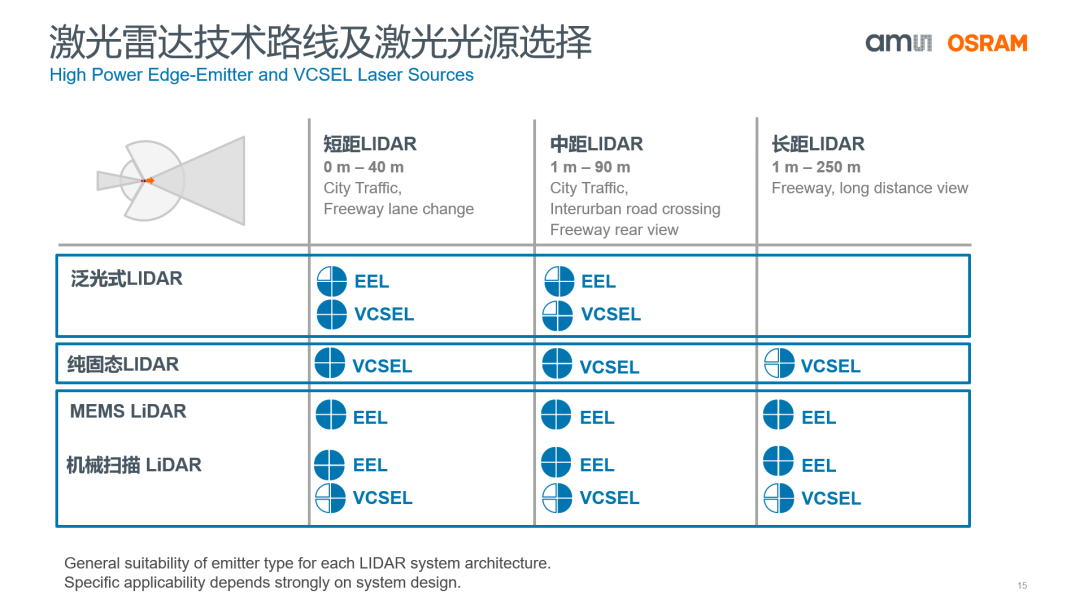
一图全解激光雷达技术路线及光源方案选择
不论是短、中、长距不同情况的激光雷达需求,还是泛光式、纯固态、MEMS、机械扫描等LiDAR,核心的光源技术依然都是EEL和VCSEL,而艾迈斯欧司朗在这两个技术上都已经得到车规级认证。
从上半年的上海车展,其实就可以管窥汽车外饰照明的新趋势,造型酷炫、设计前沿,金安敏在演讲中说道:“车灯已不仅仅是灯,还是显示屏,未来更有可能是一个投影仪。”
为了突出在汽车外饰照明领域的突破,金安敏在演讲中特别提到艾迈斯欧司朗新品EVIYOS 2.0可以把汽车头灯做成投影仪的效果。基于此新品,金安敏透露艾迈斯欧司朗已和全球主要的照明Tie 1厂商都有深度的合作,相信未来两三年会大量上市,被业界看到。

EVIYOS 2.0—汽车外饰新潮流代表产品
“如果说内饰照明和舱内传感的主流趋势,那肯定是边界越来越模糊了,二者之间呈现越来越多的结合,”金安敏直言,“例如,一般的LED灯,会有相应的环境光传感器,结合舱内环境光的水平,来判断LED现在应该要多少亮度,或者不同的颜色,这就是一个很好的传感与照明的结合。”

内饰照明与传感加深结合已成主流趋势
不论是DMS驾驶员状态监测、身份识别系统,还是HOD方向盘离手检测,手势传感再到抬头显示HUD,艾迈斯欧司朗都能够提供相应的光源技术支撑。
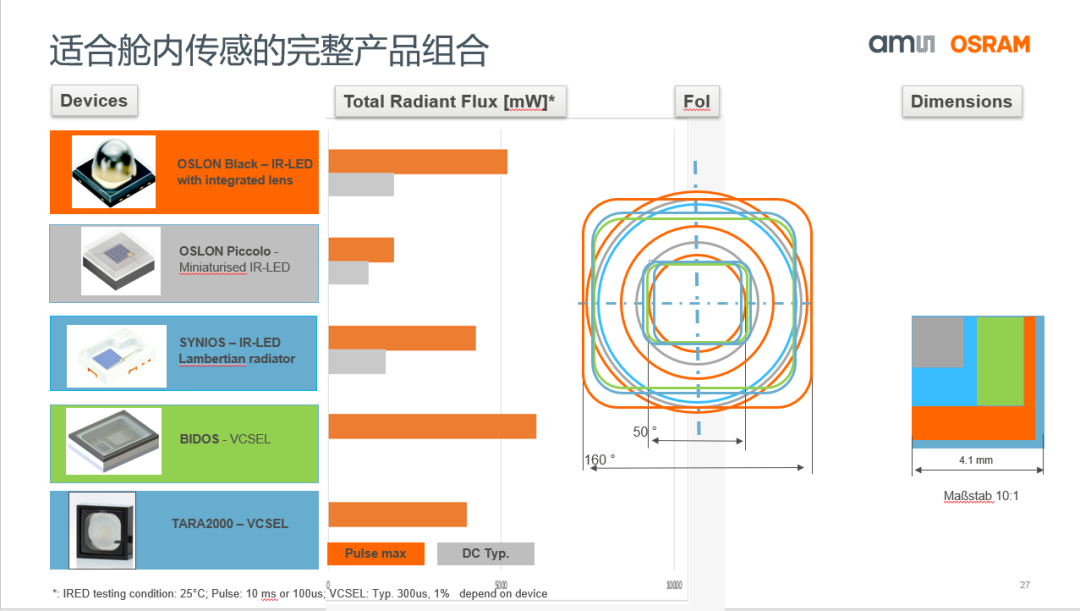
艾迈斯欧司朗舱内传感产品概览
通过金安敏对艾迈斯欧司朗合并逻辑的梳理以及其在未来智能驾驶领域:激光雷达、内外饰照明以及舱内传感等前沿趋势及艾迈斯欧司朗核心技术的介绍,现场观众也对艾迈斯欧司朗成为无可争议的光学解决方案全球领导者的愿景有了更加深刻的认知。

艾迈斯欧司朗愿景
精彩演讲带来问答高潮,现场媒体和工程师提问热度不减,就自动驾驶实现过程中的一些核心技术问题与金安敏展开了进一步的交流。
金安敏:本质上4D毫米波雷达和激光雷达不存在竞争关系,因为如果真正要实现自动驾驶,是都需要的。4D毫米波雷达相比较原来的毫米波雷达,分辨率提高了,但真正的自动驾驶,仅有4D雷达是不够的,还是需要激光雷达提供更高分辨率的信息和位置信息。所以最终整个车要达到L3、L4的自动驾驶,一定是毫米波雷达、摄像头、激光雷达共存,各种传感器做融合,才能实现。
金安敏:激光雷达的成本不降下来,就没法大规模使用,因为消费者不可能为此花很大价钱。
现在我们看到,国内主机厂在激光雷达的计划上面非常激进,尤其“造车新势力”提出来要把激光雷达做成标配,“新势力”提出以后,传统车厂也积极跟进,现在新势力带动的影响力非常大。所以我们看到,整个国内主机厂带动激光雷达的这一波量,可能是比较大的,这也就能够非常好地带动整个成本的下降。
两三年前,业界提到激光雷达一定要做到五六百美金以下才能大规模应用,现在我相信业界很快就能做到五百美金以内的激光雷达,预计在未来3~5年的时间内,激光雷达可以实现规模化应用。
金安敏:你提的问题很好,这也是在整个自动驾驶的软件、算法层面要解决的一个事情。
首先从硬件层面,我先解答一下你的顾虑或者问题。单一的摄像头只有一个解,有人或者没人。但是如果它错了呢?
现在你有摄像头、毫米波雷达,激光雷达,甚至短距的超声波传感器,你有三到四种甚至五种传感系统,这时候就可以做一个投票的选择,五种里面两种或者三种说有人的时候,你就倾向于这种是有人。
此外,还可以在时间序列上不断地投票,第一秒的时候,你这个传感系统说没人,但是在1.2秒的时候又说有人,1.5秒的时候又说有人,这时候可能就会判断是有人。因为每一个传感器探测的距离有限,所以有可能你的车距离那个人在100米的时候,有传感器说有人,有传感器说没人。当你的车距离这个人是70米的时候,可能所有传感器都说有人,所以这时候多传感器是解决这个问题的关键所在,就是你有足够多的信息,去做投票选择。如果你只应用一个信息,一旦信息是错的,那么这个就会有很严重的误判。


