

关注「嵌入式大杂烩」,选择「星标公众号」一起进步!

来源:嵌入式实验基地
你是否还在为一大堆任务放在while中,通过一个个标志,做一大堆if...else...switch...case...烦恼,想跑个freertos或者ucos,发现芯片空间有限,添加不进去了...那本文小飞哥推荐你一种裸机多任务的实现方法,让你告别繁琐的while(1),有错误之处,烦请指出,一起交流~
刚开始写代码的时候,习惯这种写法,这种方法首先是没有问题的,但是在实时性方面可能会差那么点意思,比如,任务2是需要频繁刷新的任务,任务1不是很紧急,但是执行时间比较长,那么就只能等待任务1执行完才会去执行任务2,任务2的数据刷新不及时。
随着任务的增多,这种完全等待一个任务完成再去执行下一个任务的弊端会体现的更加明显。
while (1)
{
if (task_flag1)
{
task_flag1 = 0;
task01();//任务1
}
else if (task_flag2)
{
task_flag2 = 0;
task02();//任务2
}
else if ()
{
}
... else...
{
taskn();//任务n
}
}
用过freertos或者其他系统的小伙伴一定知道,对于多任务的处理让系统运行看起来系统似乎是“并行”的,那么受限于单片机资源的情况下,能不能实现类似的功能,答案是肯定的,接下来就一起来聊聊如何实现。
其实,在日常的开发中我们已经有用到过这种思想,比如我们需要在不影响任务执行的情况下,在while(1)循环中实现LED 周期闪烁,提示系统正常运行,用定时器当然可以。。。今天不聊定时器,就用点比较接地气的来举例:
ledFlashCount++;
if (ledFlashCount % 500 == 0)
{
ledFlashCount = 0;
HAL_GPIO_TogglePin(LED_GPIO_Port, led_pin);
}
HAL_Delay(1);
如果直接延时500ms,想想while(1)会怎么样,老板看了直接走人~,所以我们采用一种时间分割的方式,每次执行1ms,到500次时,执行相应功能,这样虽然还有1ms的阻塞延时,但想比于500ms,显然是个巨大的飞跃。
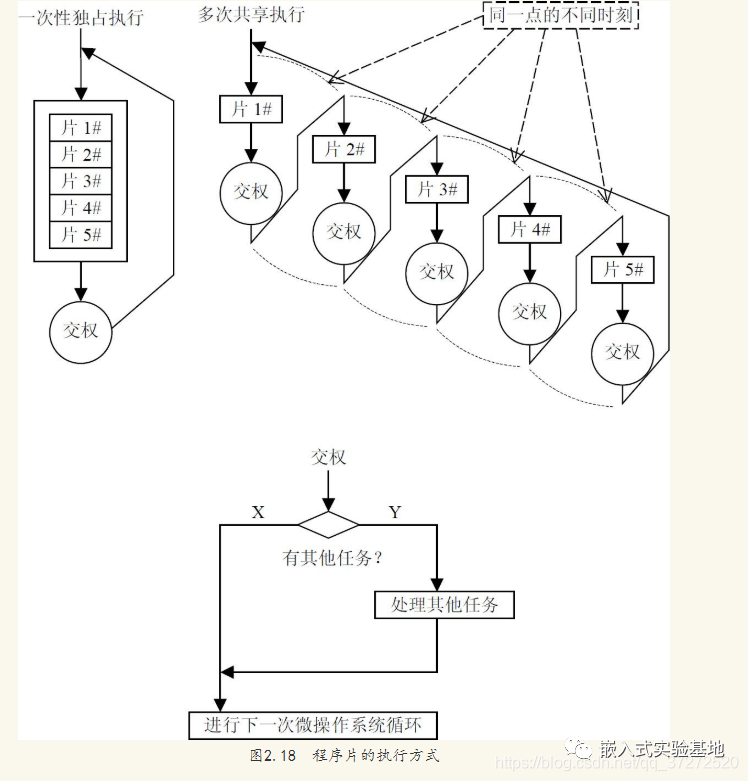
根据上面的思想,我们也可以采取时间分割的方式去处理不同的任务,把一个完整的任务分割成一段一段时间片,单次执行一段,不断周期性扫描,如此一来,我们就能够保证任务能够得到较为及时的刷新,在CSDN上有个小伙伴描述的挺不错。
一个任务的线程:
假设一个任务的执行代码有50步,通常编程只会一次执行完毕,但是我们现在需要想想,因为我们会嫌这个任务总占用着ALU的时间而影响其他任务的执行效果,所以就可以对任务进行划分,把它分为5份,每份10步,这样我们每次执行其中的一个程序片–每次正在运行的程序片我们称为线程。
(CSDN博客:https://blog.csdn.net/qq_37272520/article/details/88916568)
首先定义一个跟任务相关的结构体,Delay正是时间片执行的时长,Period是任务的执行周期
// ------ Public data type declarations ----------------------------
// User-defined type to store required data for each task
typedef struct
{
// Pointer to the task
// (must be a 'uint32_t (void)' function)
uint32_t (*pTask)(void);
// void (*pTask) (void);
// Delay (ticks) until the task will (next) be run
uint32_t Delay;
// Interval (ticks) between subsequent runs.
uint32_t Period;
} sTask_t;
添加(创建)任务
// Add_Task
void SCH_Add_Task(uint32_t (*pTask)(),
const uint32_t DELAY,
const uint32_t PERIOD)
{
uint32_t Task_id = 0;
// Check pre-conditions (START)
// First find a gap in the array (if there is one)
while ((SCH_tasks_g[Task_id].pTask != SCH_NULL_PTR) && (Task_id < SCH_MAX_TASKS))
{
Task_id++;
}
// Have we reached the end of the list?
if ((Task_id < SCH_MAX_TASKS) || (PERIOD > 0))
{
// If we're here, there is a space in the task array
// and the task to be added is periodic
SCH_tasks_g[Task_id].pTask = pTask;
SCH_tasks_g[Task_id].Delay = DELAY + 1;
SCH_tasks_g[Task_id].Period = PERIOD;
}
}
删除任务
void SCH_delete_Task(uint32_t (*pTask)())
{
uint32_t id_counter;
for (id_counter = 0; id_counter < SCH_MAX_TASKS;)
{
if (SCH_tasks_g[id_counter].pTask != pTask)
id_counter++;
else
{
__disable_irq();
SCH_tasks_g[id_counter].pTask = SCH_NULL_PTR;
__enable_irq();
id_counter = SCH_MAX_TASKS + 1;
}
}
}
更改任务
//任务运行过程中切换为其他任务运行。
//则当前任务返回后不再运行。
//为了安全应该关中断操作。
// 可以在task中增加一个参数,task运行到一定次数切换到其他的task;
//或者 事件触发 退出当前task,执行新的task
void SCH_change_Task(uint32_t (*pTask)(),
const uint32_t DELAY,
const uint32_t PERIOD)
{
__disable_irq();
if ((Current_Task_id < SCH_MAX_TASKS) || (PERIOD > 0))
{
SCH_tasks_g[Current_Task_id].pTask = pTask;
SCH_tasks_g[Current_Task_id].Delay = DELAY + 1;
SCH_tasks_g[Current_Task_id].Period = PERIOD;
}
__enable_irq();
}
执行调度器
/*----------------------------------------------------------------------------*-
SCH_Dispatch_Tasks()
-*----------------------------------------------------------------------------*/
void SCH_Dispatch_Tasks(void)
{
uint32_t Status;
uint32_t Task_id;
// Go through the task array
for (Task_id = 0; Task_id < SCH_MAX_TASKS; Task_id++)
{
// Check if there is a task at this location
if (SCH_tasks_g[Task_id].pTask != SCH_NULL_PTR)
{
if (SCH_tasks_g[Task_id].Delay == 0)
{
// printf("\n task=%d \n",Task_id);
Current_Task_id = Task_id;
Status = (*SCH_tasks_g[Task_id].pTask)(); // Run the task
// All tasks are periodic: schedule task to run again
SCH_tasks_g[Task_id].Delay = SCH_tasks_g[Task_id].Period;
}
}
}
// Update inverted copy of Tick_count_g
// Tick_count_ig = ~Tick_count_g;
// The scheduler enters idle mode at this point
// __WFI();
}
定时器查询时间片
void TIMX_IRQHandler_user(void)
{
uint32_t Task_id;
++Tick_count_g;
for (Task_id = 0; Task_id < SCH_MAX_TASKS; Task_id++)
{
if (SCH_tasks_g[Task_id].Delay > 0)
SCH_tasks_g[Task_id].Delay--;
}
}
可以看到,代码量是非常小的,当然了,功能也很单一,有得必有失嘛
封装好了必要的函数之后,接下来学习如何使用,很简单,首先创建几个任务,小飞哥创建了2个任务,两个任务分别是task01,“时间片”是50ms(自己根据需要订),任务周期是500ms,task02,“时间片”是10ms(自己根据需要订),任务周期是1000ms
SCH_Add_Task(Task_01,50,500);
SCH_Add_Task(Task_02,10,1000);
uint32_t Task_01(void){
//HAL_GPIO_TogglePin(LED_GPIO_Port, LED_Pin);
//HAL_Delay(500);
printf("task01 test\r\n");
}
uint32_t Task_02(void){
printf("task02 test\r\n");
//HAL_Delay(500);
}
在systick(或者其他定时器)中调用,关于Systick的使用详解见:Systick
void HAL_SYSTICK_Callback(void)
{
TIMX_IRQHandler_user(); //100ms调用一次
// systick_flag = 1; //中断置标志,逻辑函数中断外执行
}
最后只需要在while中调用调度器就OK了(类似于LVGL的设计思路),根据我们的设计,两个任务,一个是500ms打印“task01 test”,另一个1000ms打印“task02 test”
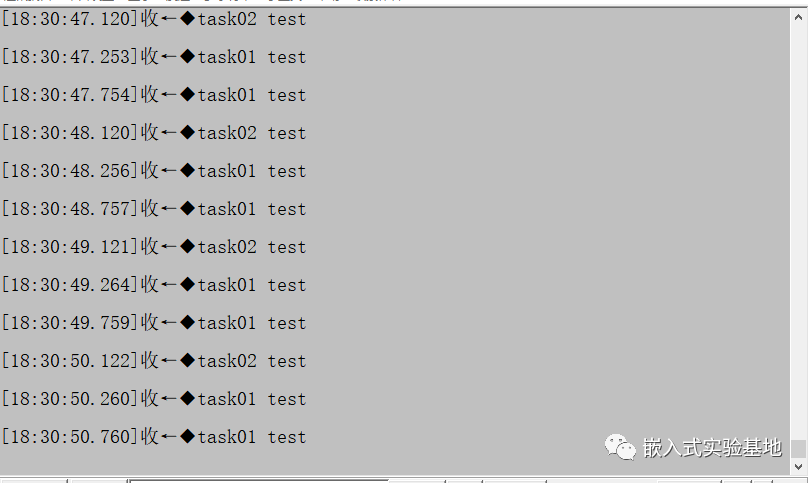
OK,完美,end~
猜你喜欢:

嵌入式开发中C语言编程的一些要点简述

实用 | 手头上无LCD却又急着开发UI?LCD模拟器了解一下~
干货 | 嵌入式之状态机编程
协议解析中的神操作:结构体嵌入共联体
