


来源 | 旺财汽车电子
智库 | 云脑智库(CloudBrain-TT)
云圈 | 进“云脑智库微信群”,请加微信:15881101905,备注研究方向
一、自主泊车系统慨述
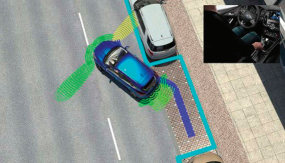
长期以来,人们都希望自动驾驶汽车能实现。当你到达写字楼、商场或游乐园等目的地后,你在大门前下车,而你"训练有素"的座驾会自主去停车场找妥车位停泊锁好(图1)。当准备回家时,智能手机上的快速通信就会把爱车开回到前门,让你上车回家。这种自动的代客泊车和它的便利将是真正让人们享受自动驾驶汽车技术的便利和高效。超声波测距系统、倒车影像和电动助力转向控制和模糊控制是其核心技术。

自主泊车系统(The Independent Parking System)是本世纪初与自动驾驶技术同时发展成长的新产品。虽然城市交通主干道以及各路支线空间意识特别强烈,道路边沿停车在国内或是国外都被当做一种合法的解决方案,经常可以遇到,但却是一种有难度的技巧,尤其是 当道路管理人员把停车位规划得紧凑又狭窄时(图2),要保证泊车的高可靠性(reliability)得到实施。
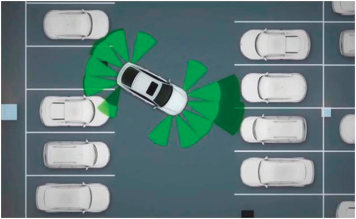
多年以前,法国国家汽车研究所(INRIA)建造了首辆原型车,解决了城市环境里无论是道路边,还是社区内平行泊车的课题。这是自动驾驶汽车研究的重要领域,也为今日自主泊车在车辆上的商业应用奠定了基础。有3种泊车形式。图3是一种垂直泊车,显示的泊车车位是与车辆行径路线相垂直的情况。另一类型是车辆交付传送带,进入立体车库排序就位,如图4所示。

21世纪,开启了汽车智能技术的新时代。以智能制造技术为主导,各行业先后进入工业4.0时代,充分利用信息通信技术、网络空间虚拟系统和信息物理系统相结合的手段,将制造业向智能化转型。作为第3层次的无人驾驶车辆一环的自主泊车系统,其基础源自20世纪80年代开发的自动泊车辅助系统APA(Automatic Parking Assistance System) 不断普及与推广。
APA系统两组主要的硬件是控制单元和位于前后保险杠及车身两侧的超声波雷达探头,按下自动泊车辅助系统激活按钮,雷达探头会在低车速(30km/h)及侧向距离1.5m左右内成功完成扫描。而自动泊车辅助系统,当在车位旁有路灯杆、中小型树木等柱状障碍物时,为防止雷达探测发生误差造成碰撞风险,此时系统将不被激活。前后左右的雷达探头测量车辆自身与周围物体间的距离与角度,驾驶员仅需控制车速,车载电脑计算出操作流程,配合车速调整方向盘转动,自行进入停车位,但挡位及制动还需人为控制,尚未实现全智能化。
无论对于新手还是经验颇丰的老驾驶员把车泊入停车位,都是驾驶过程中相对不容大意、需要特别关注的一个环节,尤其是遇到偏窄的车位。近几年一个智能化更炫酷的配置出现在一些新款的车型上,能自行判断车位,自动泊车入位,即是自动泊车辅助系统APA。其包括倒车雷达、倒车影像、360度全息影像等配置,已成为中高档汽车的标配。如福特的福克斯掀背车(Ford Focus Hatchback),国内的大众途安、帕萨特cc、斯柯达昊锐、丰田皇冠、梅赛德斯-奔驰、宝马、雷克萨斯LS等车型配备,大都采用由INRIA 开发的关键技术阵列所设计的基本系统。因而,INRIA的研究成果已成为汽车工程师协会(SAE)J3016 Standard的通用标准。
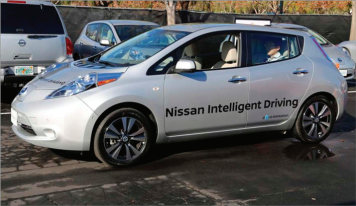
有关交通事故数据库和保险公司事故理赔的统计资料表明:泊车事故占各类交通事故30%以上,其中1/2~3/4又是倒车的泊车碰撞造成的。今天,科学家借助深度神经网络已进一步破译人类的思维与想象,人工智能(AI:Artificial Intelligence)正走近人类大脑,自主泊车系统的实现已成为可能。图5展示了一台日产汽车公司的聆风电动汽车在无人驾驶的情况下实现自动泊车。
二、自主泊车系统的基本原理
2.1 APS的构建
自主泊车系统由3个功能块组成:①环境数据采集系统,包括图像采集和车载距离探测系统,将图像与车身和障碍物间距离的数据,由数据线传递至中央处理器;
②CPU对数据分析处理,根据车辆当前位置、目标位置及周围环境参数作出自主泊车策略,并转换成电信号;
③车辆策略控制执行系统在接受电信号后,指令指示车辆行驶的方向、角度及动力支援等诸方面的操控。
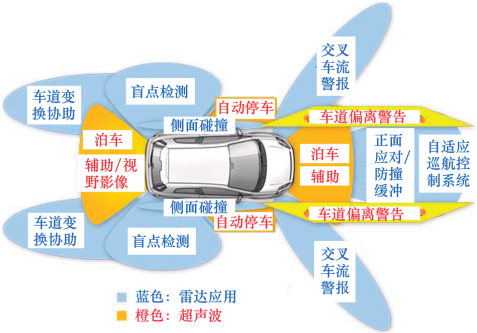
自主泊车系统需要应用到能支持自动驾驶、安装在车身各处的众多传感器,包括车载雷达(激光雷达系统)、视觉CCD摄像头和超声波传感器探头,还有全球定位系统。
雷达用于自动巡航控制、碰撞预警、泊车和并线辅助,并提供地图信息,便于车辆自动导航及发现行人、自行车及其他障碍物;视觉摄像头主管的是倒车安全、盲区监控、车道保持和防疲劳等;利用超声波探测车辆周围环境,测量与其他车辆及障碍物之间的距离,组成环境数据采集系统。
当车辆在获得合适的停车位信息后,通过CPU软件系统指挥硬件的运作,即可使车辆泊车入位,并以显示器(或蜂鸣器)装备告示。图6绘出了美国Analog Devices公司关于车辆运用雷达超声波技术的装置工作于APS的情况。
1)驻车定位系统(PTS)读取车速挡位状态、点火开关状态等信息,促动车距传感器和警告元件,通过Flax Ray 总线与CAN网络通信。
2)电动助力转向机构和转向柱管控模块控制单元读取方向盘转角和转向角速度,通过Flax Ray 总线与CAN网络通信,链接电子控制单元ECU。
3)APS还需链接车辆稳定系统控制单元,通过分析各传感器传递来的信号向防抱死制动(ABS)、起步加速防滑控制(ASR)发出准确的控制指令、纠错,保证车辆维持良好的动态平衡,在各种状态下有最佳的稳定性。当后轮驱动车辆因转向过度、后轮失控而甩尾时,ESP会轻微制动外侧前轮来稳定车辆(此时因降低轮速而使车轮抱死);当转向不足时,ESP会迅速轻微制动内后轮,来校正行驶方向。
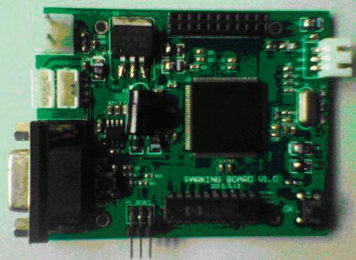
福特汽车采用英飞凌SAK-XC2336B-40 F8 0L AA型的中央处理器,该项目在已经开发出的原理样机的基础上,结合产品样机的要求,进行系统的可靠性研究、匹配性试验以及生产工艺的优化,以改进系统的稳定性和可靠性,降低成本,满足产品的使用性能。美国的业界认为英飞凌(Infineon) 公司对自主泊车系统关键技术研究较为领先。一台英飞凌的自主泊车系统结构框图见图7,产品图片见图8。
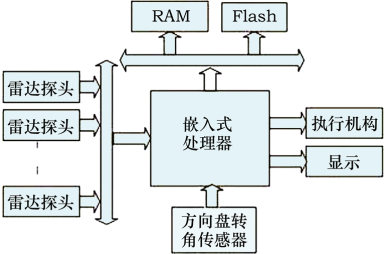
该产品的性能指标:泊车最大行驶速度为10km/h;在目标停车位置上与其他两辆相邻汽车的平行距离为30cm;最小停车位长度为1.5倍车身长度;正常工作温度为-40~85℃,存储温度为-40~125℃;ECU通过相关环境、机械试验,具有过流、过电压、短路等常规保护功能。
所联系的传感器:霍尔传感器(位移信息);加速度传感器(加速度信息);超声传感器(障碍物距离信息);CCD摄像头(车位大小、障碍物情况信息);角速度传感器(左右转角角速度信息,以提供左右转动角度的指令)。
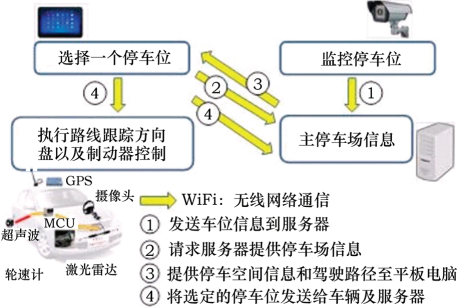
图9展示了自主泊车系统的运行框图。
2.2 APS的核心技术与运作
2.2.1 超声波测距是时间差测距法
超声波发射器向某一方向发射超声波,发射的同时开始计时。该超声波在遇到障碍物时会即时返回,超声波接收器在接收到反射波时,即时停止计时。由超声波在空气中传播速度及超声波发射接收的时间差即能计算出发射点到障碍物间的实际距离,公式为:
S=1/2(Ct)
式中:C——超声波在空气中传播的速度(与温度相关);t——超声波发射接收的时间差(不仅与单片机选型有关,而且定时器精度越高,测量结果越精确)。
超声波传播速度与温度有正向线性关系,温度每升高1℃,声速增加0.607m/s。
因而有修正后的实际波速V=(331.5+0.607t)m/s ,t是温度检测电路测得的现场实时温度。
超声波测距原理如图10所示。
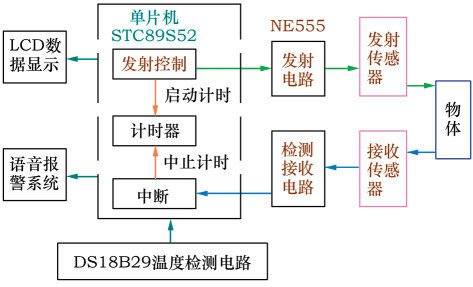
图10 超声波测距的原理图
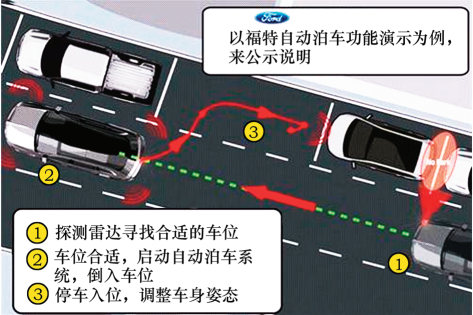
图11 一辆福特车的平行泊车
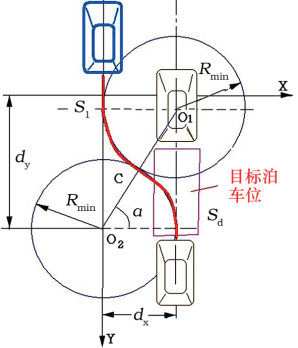
图12 共切圆弧的路径规划
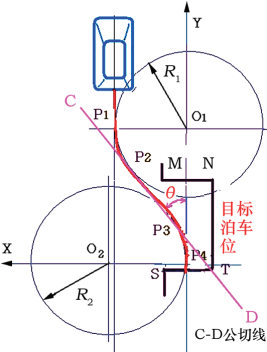
图13 兼具路径规划与模糊控制的泊车方案
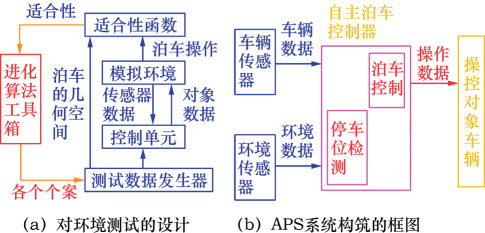
图14 自主泊车运作过程
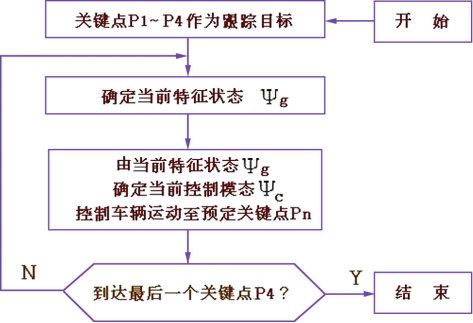
图15 路径规划与模糊控制结合的控制流程图
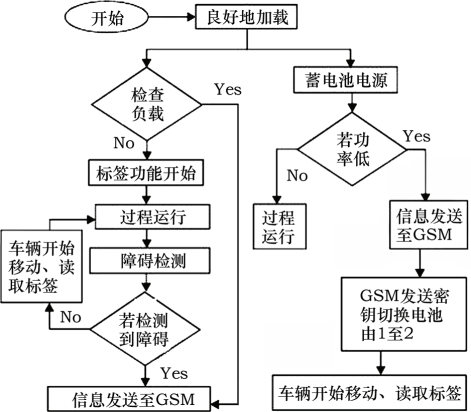
图16 自主泊车系统运行的流程图
- The End -
声明:欢迎转发本号原创内容,转载和摘编需经本号授权并标注原作者和信息来源为云脑智库。本公众号目前所载内容为本公众号原创、网络转载或根据非密公开性信息资料编辑整理,相关内容仅供参考及学习交流使用。由于部分文字、图片等来源于互联网,无法核实真实出处,如涉及相关争议,请跟我们联系。我们致力于保护作者知识产权或作品版权,本公众号所载内容的知识产权或作品版权归原作者所有。本公众号拥有对此声明的最终解释权。
投稿/招聘/推广/合作/入群/赞助 请加微信:15881101905,备注关键词

微群关键词:天线、射频微波、雷达通信电子战、芯片半导体、信号处理、软件无线电、测试制造、相控阵、EDA仿真、通导遥、学术前沿、知识服务、合作投资.
“阅读是一种习惯,分享是一种美德,我们是一群专业、有态度的知识传播者.”
↓↓↓ 戳“阅读原文”,加入“知识星球”,发现更多精彩内容.
/// 先别走,安排点个“赞”和“在看” 吧!↓↓↓
