前面的调度学习都是默认在单个 CPU 上的调度策略。我们知道为了 CPU 之间减少“干扰”,每个 CPU 上都有一个任务队列。运行的过程种可能会出现有的 CPU 很忙,有的 CPU 很闲,如下图所示:
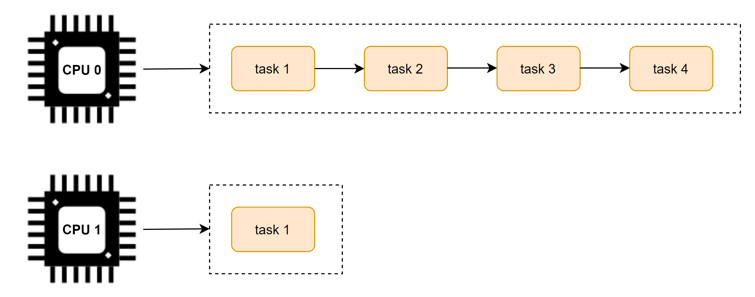
为了避免这个问题的出现,Linux 内核实现了 CPU 可运行进程队列之间的负载均衡。
因为负载均衡是在多个核上的均衡,所以在讲解负载均衡之前,我们先看下多核的架构。
将 task 从负载较重的 CPU 上转移到负载相对较轻的 CPU 上执行,这个过程就是负载均衡的过程。
这里以 Arm64 的 NUMA(Non Uniform Memory Access) 架构为例,看下多核架构的组成。
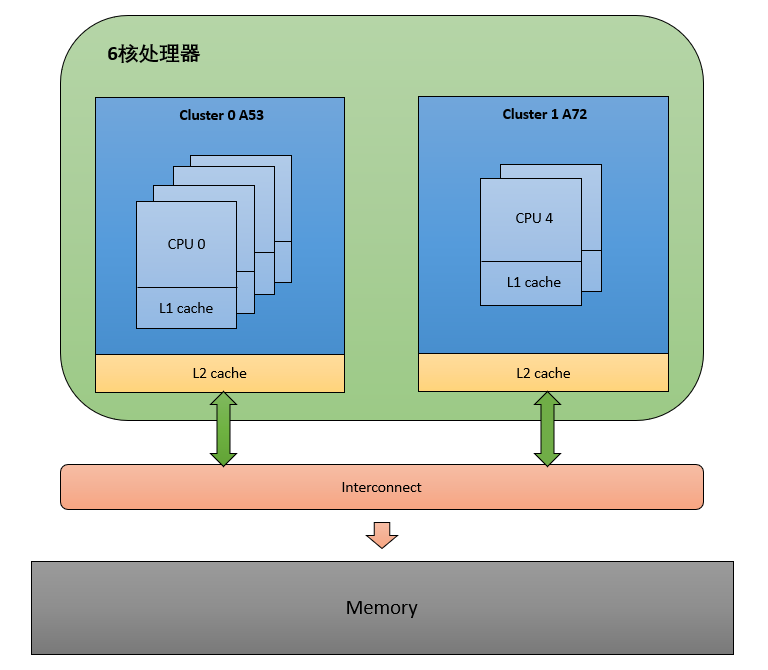
从图中可以看出,这是非一致性内存访问。每个 CPU 访问 local memory,速度更快,延迟更小。因为 Interconnect 模块的存在,整体的内存会构成一个内存池,所以 CPU 也能访问 remote memory,但是相对 local memory 来说速度更慢,延迟更大。
我们知道一个多核心的 SOC 片上系统,内部结构是很复杂的。内核采用 CPU 拓扑结构来描述一个 SOC 的架构,使用调度域和调度组来描述 CPU 之间的层次关系。
每一个 CPU 都会维护这么一个结构体实例,用来描述 CPU 拓扑。
struct cpu_topology {
int thread_id;
int core_id;
int cluster_id;
cpumask_t thread_sibling;
cpumask_t core_sibling;
};
可以通过 /sys/devices/system/cpu/cpuX/topology 查看 cpu topology 的信息。
cpu_topology 结构体是通过函数 parse_dt_topology() 解析 DTS 中的信息建立的:
kernel_init() -> kernel_init_freeable() -> smp_prepare_cpus() -> init_cpu_topology() -> parse_dt_topology()
static int __init parse_dt_topology(void)
{
struct device_node *cn, *map;
int ret = 0;
int cpu;
cn = of_find_node_by_path("/cpus"); ------(1)
if (!cn) {
pr_err("No CPU information found in DT\n");
return 0;
}
/*
* When topology is provided cpu-map is essentially a root
* cluster with restricted subnodes.
*/
map = of_get_child_by_name(cn, "cpu-map"); ------(2)
if (!map)
goto out;
ret = parse_cluster(map, 0); ------(3)
if (ret != 0)
goto out_map;
topology_normalize_cpu_scale();
/*
* Check that all cores are in the topology; the SMP code will
* only mark cores described in the DT as possible.
*/
for_each_possible_cpu(cpu)
if (cpu_topology[cpu].cluster_id == -1)
ret = -EINVAL;
out_map:
of_node_put(map);
out:
of_node_put(cn);
return ret;
}
以 i.mx8qm 为例,topology 为:”4A53 + 2A72”,dts中定义如下:
# imx8qm.dtsi
cpus: cpus {
#address-cells = <2>;
#size-cells = <0>;
A53_0: cpu@0 {
device_type = "cpu";
compatible = "arm,cortex-a53", "arm,armv8";
reg = <0x0 0x0>;
clocks = <&clk IMX_SC_R_A53 IMX_SC_PM_CLK_CPU>;
enable-method = "psci";
next-level-cache = <&A53_L2>;
operating-points-v2 = <&a53_opp_table>;
#cooling-cells = <2>;
};
A53_1: cpu@1 {
device_type = "cpu";
compatible = "arm,cortex-a53", "arm,armv8";
reg = <0x0 0x1>;
clocks = <&clk IMX_SC_R_A53 IMX_SC_PM_CLK_CPU>;
enable-method = "psci";
next-level-cache = <&A53_L2>;
operating-points-v2 = <&a53_opp_table>;
#cooling-cells = <2>;
};
A53_2: cpu@2 {
device_type = "cpu";
compatible = "arm,cortex-a53", "arm,armv8";
reg = <0x0 0x2>;
clocks = <&clk IMX_SC_R_A53 IMX_SC_PM_CLK_CPU>;
enable-method = "psci";
next-level-cache = <&A53_L2>;
operating-points-v2 = <&a53_opp_table>;
#cooling-cells = <2>;
};
A53_3: cpu@3 {
device_type = "cpu";
compatible = "arm,cortex-a53", "arm,armv8";
reg = <0x0 0x3>;
clocks = <&clk IMX_SC_R_A53 IMX_SC_PM_CLK_CPU>;
enable-method = "psci";
next-level-cache = <&A53_L2>;
operating-points-v2 = <&a53_opp_table>;
#cooling-cells = <2>;
};
A72_0: cpu@100 {
device_type = "cpu";
compatible = "arm,cortex-a72", "arm,armv8";
reg = <0x0 0x100>;
clocks = <&clk IMX_SC_R_A72 IMX_SC_PM_CLK_CPU>;
enable-method = "psci";
next-level-cache = <&A72_L2>;
operating-points-v2 = <&a72_opp_table>;
#cooling-cells = <2>;
};
A72_1: cpu@101 {
device_type = "cpu";
compatible = "arm,cortex-a72", "arm,armv8";
reg = <0x0 0x101>;
clocks = <&clk IMX_SC_R_A72 IMX_SC_PM_CLK_CPU>;
enable-method = "psci";
next-level-cache = <&A72_L2>;
operating-points-v2 = <&a72_opp_table>;
#cooling-cells = <2>;
};
A53_L2: l2-cache0 {
compatible = "cache";
};
A72_L2: l2-cache1 {
compatible = "cache";
};
cpu-map {
cluster0 {
core0 {
cpu = <&A53_0>;
};
core1 {
cpu = <&A53_1>;
};
core2 {
cpu = <&A53_2>;
};
core3 {
cpu = <&A53_3>;
};
};
cluster1 {
core0 {
cpu = <&A72_0>;
};
core1 {
cpu = <&A72_1>;
};
};
};
};
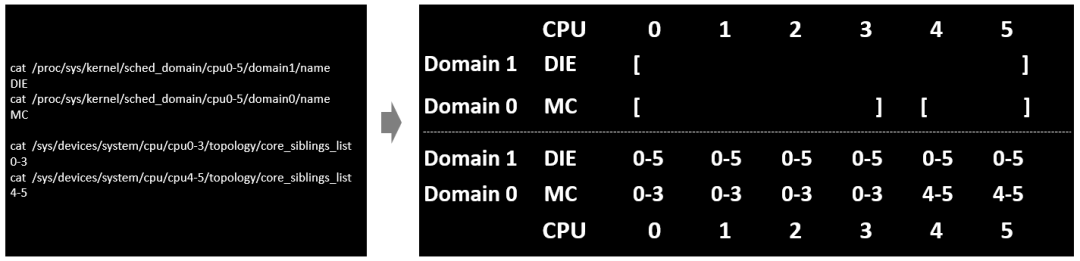
经过 parse_dt_topology(),update_siblings_masks() 解析后得到 cpu_topology 的值为:
CPU0: cluster_id = 0, core_id = 0
CPU1: cluster_id = 0, core_id = 1
CPU2: cluster_id = 0, core_id = 2
CPU3: cluster_id = 0, core_id = 3
CPU4: cluster_id = 1, core_id = 0
CPU5: cluster_id = 1, core_id = 1
在 Linux 内核中,调度域使用 sched_domain 结构表示,调度组使用 sched_group 结构表示。
struct sched_domain {
struct sched_domain *parent;
struct sched_domain *child;
struct sched_group *groups;
unsigned long min_interval;
unsigned long max_interval;
...
};
sched_domain 是分成两个 level,base domain 称为 MC domain(multi core domain),顶层 domain 称为 DIE domain。
struct sched_group {
struct sched_group *next;
unsigned int group_weight;
...
struct sched_group_capacity *sgc;
unsigned long cpumask[0];
};
为了减少锁的竞争,每一个 CPU 都有自己的 MC domain、DIE domain 以及 sched_group,并且形成了 sched_domain 之间的层级结构,sched_group 的环形链表结构。CPU 对应的调度域和调度组可通过在设备模型文件 /proc/sys/kernel/sched_domain 里查看。
具体的 sched_domain 的初始化代码分析如下:
kernel_init() -> kernel_init_freeable() -> sched_init_smp() -> init_sched_domains(cpu_active_mask) -> build_sched_domains(doms_cur[0], NULL)
static int
build_sched_domains(const struct cpumask *cpu_map, struct sched_domain_attr *attr)
{
enum s_alloc alloc_state;
struct sched_domain *sd;
struct s_data d;
int i, ret = -ENOMEM;
alloc_state = __visit_domain_allocation_hell(&d, cpu_map); ------(1)
if (alloc_state != sa_rootdomain)
goto error;
/* Set up domains for CPUs specified by the cpu_map: */
for_each_cpu(i, cpu_map) {
struct sched_domain_topology_level *tl;
sd = NULL;
for_each_sd_topology(tl) {
sd = build_sched_domain(tl, cpu_map, attr, sd, i); ------(2)
if (tl == sched_domain_topology)
*per_cpu_ptr(d.sd, i) = sd;
if (tl->flags & SDTL_OVERLAP)
sd->flags |= SD_OVERLAP;
}
}
/* Build the groups for the domains */
for_each_cpu(i, cpu_map) {
for (sd = *per_cpu_ptr(d.sd, i); sd; sd = sd->parent) {
sd->span_weight = cpumask_weight(sched_domain_span(sd));
if (sd->flags & SD_OVERLAP) {
if (build_overlap_sched_groups(sd, i))
goto error;
} else {
if (build_sched_groups(sd, i)) ------(3)
goto error;
}
}
}
......
/* Attach the domains */
rcu_read_lock();
for_each_cpu(i, cpu_map) {
int max_cpu = READ_ONCE(d.rd->max_cap_orig_cpu);
int min_cpu = READ_ONCE(d.rd->min_cap_orig_cpu);
sd = *per_cpu_ptr(d.sd, i);
if ((max_cpu < 0) || (cpu_rq(i)->cpu_capacity_orig >
cpu_rq(max_cpu)->cpu_capacity_orig))
WRITE_ONCE(d.rd->max_cap_orig_cpu, i);
if ((min_cpu < 0) || (cpu_rq(i)->cpu_capacity_orig <
cpu_rq(min_cpu)->cpu_capacity_orig))
WRITE_ONCE(d.rd->min_cap_orig_cpu, i);
cpu_attach_domain(sd, d.rd, i); ------(4)
}
rcu_read_unlock();
if (!cpumask_empty(cpu_map))
update_asym_cpucapacity(cpumask_first(cpu_map));
ret = 0;
error:
__free_domain_allocs(&d, alloc_state, cpu_map); ------(5)
return ret;
}
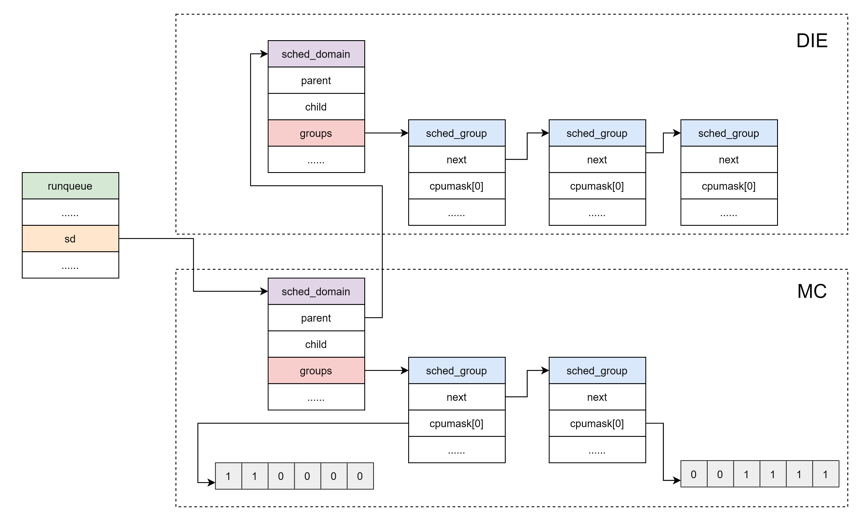
所以,可运行进程队列与调度域和调度组的关系如下图所示:
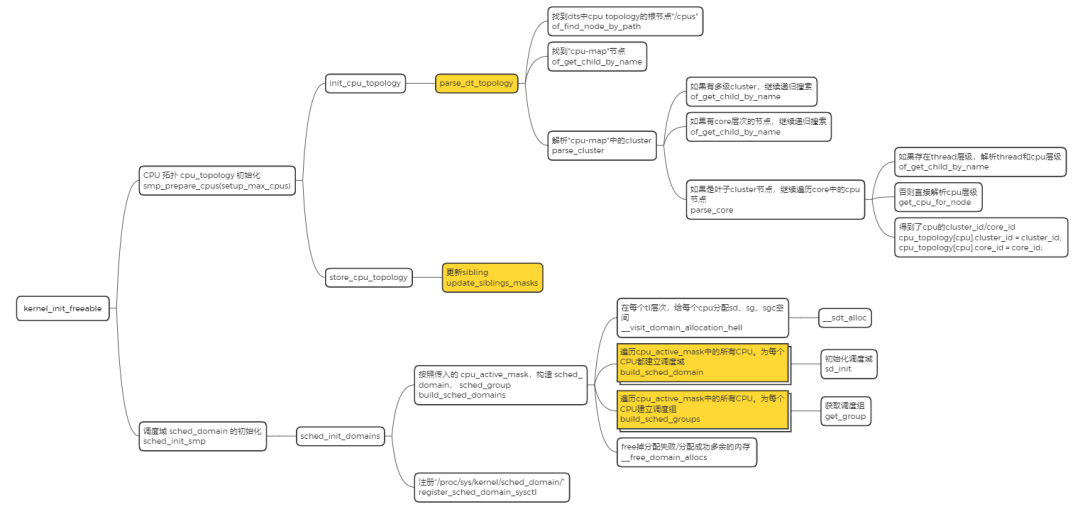
这里用一张图来总结下 CPU 拓扑,调度域初始化的过程,如下所示:
根据已经生成的 CPU 拓扑,调度域和调度组,最终可以生成如下图所示的关系图。
在上面的结构中,顶层的 DIE domain 覆盖了系统中所有的 CPU,4 个 A53 是 Cluster 0,共享 L2 cache,两外 2 个 A72 是 Cluster 1,共享 L2 cache。那么每个 Cluster 可以认为是一个 MC 调度域,左边的 MC 调度域中有 4 个调度组,右边的 MC 调度域中有 2 个调度组,每个调度组中只有 1 个 CPU。整个 SOC 可以认为是高一级别的 DIE 调度域,其中有两个调度组,Cluster 0 属于一个调度组,Cluster 1 属于另一个调度组。跨 Cluster 的负载均衡是需要清除 L2 cache 的,开销是很大的,因此 SOC 级别的 DIE 调度域进行负载均衡的开销比 MC 调度域更大一些。
到目前为止,我们已经将内核的调度域构建起来了,CFS 可以利用 sched_domain 来完成多核间的负载均衡了。
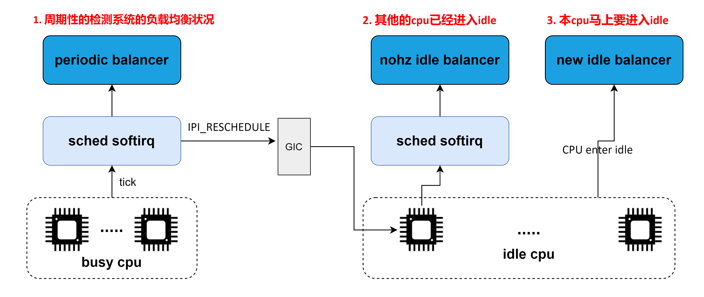
CFS 任务的负载均衡器有两种:
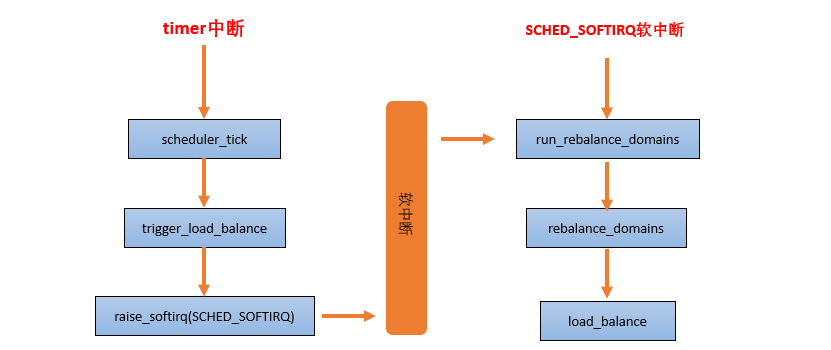
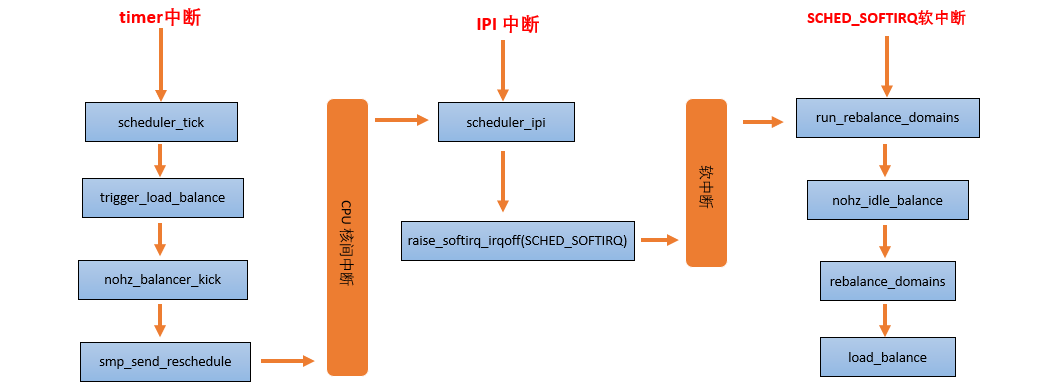
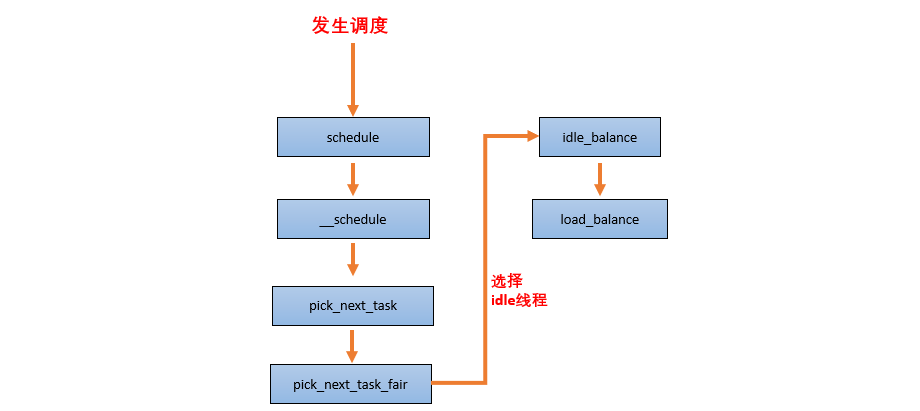
当一个 CPU 上进行负载均衡的时候,总是从 base domain 开始,检查其所属 sched group 之间的负载均衡情况,如果有不均衡情况,那么会在该 CPU 所属 Cluster 之间进行迁移,以便维护 Cluster 内各个CPU 的任务负载均衡。
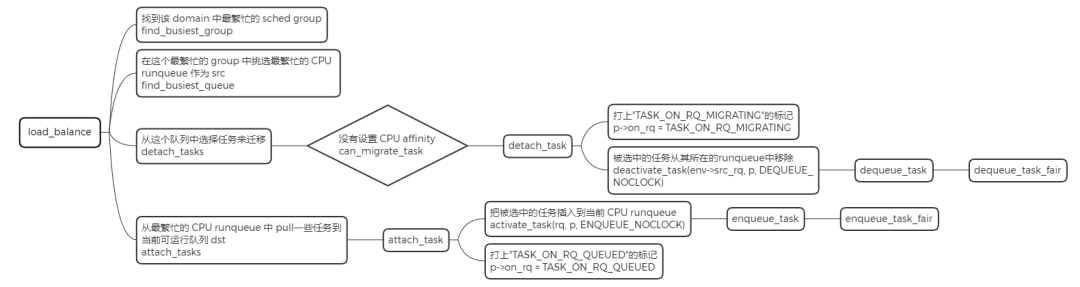
load_balance 是处理负载均衡的核心函数,它的处理单元是一个调度域,其中会包含对调度组的处理。
static int load_balance(int this_cpu, struct rq *this_rq,
struct sched_domain *sd, enum cpu_idle_type idle,
int *continue_balancing)
{
......
redo:
if (!should_we_balance(&env)) {
*continue_balancing = 0;
goto out_balanced;
}
group = find_busiest_group(&env); ------(1)
if (!group) {
schedstat_inc(sd->lb_nobusyg[idle]);
goto out_balanced;
}
busiest = find_busiest_queue(&env, group); ------(2)
if (!busiest) {
schedstat_inc(sd->lb_nobusyq[idle]);
goto out_balanced;
}
BUG_ON(busiest == env.dst_rq);
schedstat_add(sd->lb_imbalance[idle], env.imbalance);
env.src_cpu = busiest->cpu;
env.src_rq = busiest;
ld_moved = 0;
if (busiest->nr_running > 1) {
env.flags |= LBF_ALL_PINNED;
env.loop_max = min(sysctl_sched_nr_migrate, busiest->nr_running);
more_balance:
rq_lock_irqsave(busiest, &rf);
update_rq_clock(busiest);
cur_ld_moved = detach_tasks(&env); ------(3)
rq_unlock(busiest, &rf);
if (cur_ld_moved) {
attach_tasks(&env); ------(4)
ld_moved += cur_ld_moved;
}
local_irq_restore(rf.flags);
if (env.flags & LBF_NEED_BREAK) {
env.flags &= ~LBF_NEED_BREAK;
goto more_balance;
}
......
}
......
out:
return ld_moved;
}

你可以添加微信17775982065为好友,注明:公司+姓名,拉进 RT-Thread 官方微信交流群!

👇 点击阅读原文进入RT-Thread官网
