接前文:深入理解Linux内核之主调度器(上)
前面选择了一个合适进程作为下一个进程,接下来做重要的上下文切换动作,来保存上一个进程的“上下文”恢复下一个进程的“上下文”,主要包括进程地址空间切换和处理器状态切换。
注:这里的上下文实际上是指进程运行时最小寄存器的集合。
如果切换的next进程不是同一个进程,才进行切换:
__schedule
i f (likely(prev != next)) {
...
context_switch //进程上下文切换
}
进程地址空间切换就是切换虚拟地址空间,使得切换之后,当前进程访问的是属于自己的虚拟地址空间(包括用户地址空间和内核地址空间),本质上是切换页表基地址寄存器。
进程地址空间切换让进程产生独占系统内存的错觉,因为切换完地址空间后,当前进程可以访问属于它的海量的虚拟地址空间(内核地址空间各个进程共享,用户地址空间各个进程私有),而实际上物理地址空间只有一份。
下面给出源代码分析:
context_switch
->
/*
¦* kernel -> kernel lazy + transfer active
¦* user -> kernel lazy + mmgrab() active
¦*
¦* kernel -> user switch + mmdrop() active
¦* user -> user switch
¦*/
if (!next->mm) { // to kernel
enter_lazy_tlb(prev->active_mm, next);
next->active_mm = prev->active_mm;
if (prev->mm) // from user
mmgrab(prev->active_mm);
else
prev->active_mm = NULL;
} else { // to user
...
switch_mm_irqs_off(prev->active_mm, next->mm, next);
if (!prev->mm) { // from kernel
/* will mmdrop() in finish_task_switch(). */
rq->prev_mm = prev->active_mm;
prev->active_mm = NULL;
}
}
以上代码是判断是否next进程是内核线程,如果是则不需要进行地址空间切换(实际上指的是用户地址空间),因为内核线程总是运行在内核态访问的是内核地址空间,而内核地址空间是所有的进程共享的。在arm64架构中,内核地址空间是通过ttbr1_el1来访问,而它的主内核页表在内核初始化的时候已经填充好了,也就是我们常说的swapper_pg_dir页表,后面所有对内核地址空间的访问,无论是内核线程也好还是用户任务,统统通过swapper_pg_dir页表来访问,而在内核初始化期间swapper_pg_dir页表地址已经加载到ttbr1_el1中。
需要说明一点的是:这里会做“借用” prev->active_mm的处理,借用的目的是为了避免切换属于同一个进程的地址空间。举例说明:Ua -> Ka -> Ua ,Ua表示用户进程, Ka表示内核线程,当进行这样的切换的时候,Ka 借用Ua地址空间,Ua -> Ka不需要做地址空间切换,而Ka -> Ua按理来说需要做地址空间切换,但是由于切换的还是Ua 地址空间,所以也不需要真正的切换(判断了Ka->active_mm == Ua->active_mm ),当然还包括切换的是同一个进程的多个线程的情况,这留给大家思考。
下面来看下真正的地址空间切换:
switch_mm_irqs_off(prev->active_mm, next->mm, next);
->switch_mm //arch/arm64/include/asm/mmu_context.h
-> if (prev != next)
__switch_mm(next);
->check_and_switch_context(next)
-> ... //asid处理
-> cpu_switch_mm(mm->pgd, mm)
->cpu_do_switch_mm(virt_to_phys(pgd),mm)
-> unsigned long ttbr1 = read_sysreg(ttbr1_el1);
unsigned long asid = ASID(mm);
unsigned long ttbr0 = phys_to_ttbr(pgd_phys);
...
write_sysreg(ttbr1, ttbr1_el1); //设置asid到ttbr1_el1
isb();
write_sysreg(ttbr0, ttbr0_el1); //设置mm->pgd 到ttbr0_el1
上面代码是做真正的地址空间切换,实际的切换很简单,并没有那么复杂和玄乎,仅仅设置页表基地址寄存器即可,当然这里还涉及到了为了防止频繁无效tlb的ASID的设置。
主要做的工作就是设置next进程的ASID到ttbr1_el1, 设置mm->pgd 到ttbr0_el1,仅此而已!
需要注意的是:1.写到ttbr0_el1的值是进程pgd页表的物理地址。2.虽然做了这样的切换,但是这个时候并不能访问到next的用户地址空间,因为还处在主调度器上下文中,属于内核态,访问的是内核空间。
而一旦返回了用户态,next进程就能正常访问自己地址空间内容:
访问一个用户空间的虚拟地址va,首先通过va和记录在ttbr1_el1的asid查询tlb,如果找到相应表项则获得pa进行访问。
如果tlb中没有找到,通过ttbr0_el1来遍历自己的多级页表,找到相应表项则获得pa进行访问。
如果发生中断异常等访问内核地址空间,直接通过ttbr1_el1即可完成访问。
访问没有建立页表映射的合法va,发生缺页异常来建立映射关系,填写属于进程自己的各级页表,然后访问。
访问无法地址,发生缺页杀死进程等等。
来切换下一个进程的执行流,上一个进程执行状态保存,让下一个进程恢复执行状态。
处理器状态切换而后者让进程产生独占系统cpu的错觉,使得系统中各个任务能够并发(多个任务在多个cpu上运行)或分时复用(多个任务在一个cpu上运行)cpu资源。
下面给出代码:
context_switch
->(last) = __switch_to((prev), (next))
-> fpsimd_thread_switch(next) //浮点寄存器切换
...
last = cpu_switch_to(prev, next);
处理器状态切换会做浮点寄存器等切换,最终调用cpu_switch_to做真正切换。
cpu_switch_to //arch/arm64/kernel/entry.S
SYM_FUNC_START(cpu_switch_to)
mov x10, #THREAD_CPU_CONTEXT
add x8, x0, x10
mov x9, sp
stp x19, x20, [x8], #16 // store callee-saved registers
stp x21, x22, [x8], #16
stp x23, x24, [x8], #16
stp x25, x26, [x8], #16
stp x27, x28, [x8], #16
stp x29, x9, [x8], #16
str lr, [x8]
add x8, x1, x10
ldp x19, x20, [x8], #16 // restore callee-saved registers
ldp x21, x22, [x8], #16
ldp x23, x24, [x8], #16
ldp x25, x26, [x8], #16
ldp x27, x28, [x8], #16
ldp x29, x9, [x8], #16
ldr lr, [x8]
mov sp, x9
msr sp_el0, x1
ptrauth_keys_install_kernel x1, x8, x9, x10
scs_save x0, x8
scs_load x1, x8
ret
SYM_FUNC_END(cpu_switch_to)
这里传递过来的是x0为prev进程的进程描述符(struct task_struct)地址, x1为next的进程描述符地址。会就将prev进程的 x19-x28,fp,sp,lr保存到prev进程的tsk.thread.cpu_context中,next进程的这些寄存器值从next进程的tsk.thread.cpu_context中恢复到相应寄存器。这里还做了sp_el0设置为next进程描述符的操作,为了通过current宏找到当前的任务。
需要注意的是:
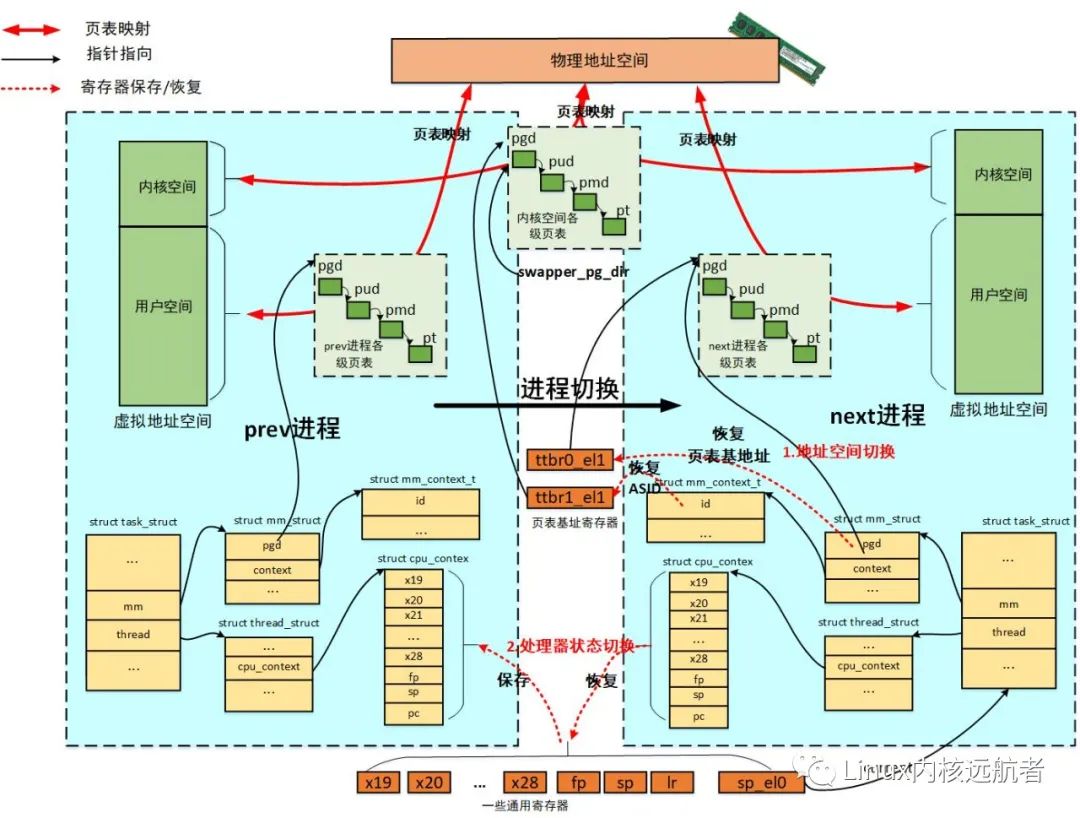
这里给出了进程切换的图示(以arm64处理器为例),这里从prev进程切换到next进程。
当进程重新被调度的时候,从原来的调度现场恢复执行。
1)如果切换的next进程是刚fork的进程,它并没有真正的这些调度上下文的存在,那么lr是什么呢?这是在fork的时候设置的:
do_fork
...
copy_thread //arch/arm64/kernel/process.c
->memset(&p->thread.cpu_context, 0, sizeof(struct cpu_context));
p->thread.cpu_context.pc = (unsigned long)ret_from_fork;
p->thread.cpu_context.sp = (unsigned long)childregs;
设置为了ret_from_fork的地址,当然这里也设置了sp等调度上下文(这里将进程切换保存的寄存器称之为调度上下文)。
SYM_CODE_START(ret_from_fork)
bl schedule_tail
cbz x19, 1f // not a kernel thread
mov x0, x20
blr x19
1: get_current_task tsk
b ret_to_user
SYM_CODE_END(ret_from_fork)
刚fork的进程,从cpu_switch_to的ret指令执行后返回,lr加载到pc。
于是执行到ret_from_fork:这里首先调用schedule_tail对前一个进程做清理工作,然后判断是否为内核线程如果是执行内核线程的执行函数,如果是用户任务通过ret_to_user返回到用户态。
2)如果是之前已经被切换过的进程,lr为cpu_switch_to调用的下一条指令地址(这里实际上是__schedule函数中调用barrier()的指令地址)。
switch_to(prev, next, prev)
-> ((last) = __switch_to((prev), (next)))
这里做处理器状态切换时,传递了两个参数,返回了一个参数:
prev和next很好理解就是 就是前一个进程(当前进程)和下一个进程的 task_struct结构指针,那么last是什么呢?
一句话:返回的last是当前重新被调度的进程的上一个进程的 task_struct结构指针。
如:A ->B ->千山万水->D -> A 上面的切换过程:A切换到B 然后经历千山万水再从D -> A,这个时候A重新被调度时,last即为D的 task_struct结构指针。
获得当前重新被调度进程的前一个进程是为了回收前一个进程资源,见后面分析。
进程被重新调度时无论是否为刚fork出的进程都会走到finish_task_switch这个函数,下面我们来看它做了什么事情:
主要工作为:检查回收前一个进程资源,为当前进程恢复执行做一些准备工作。
finish_task_switch
->finish_lock_switch
->raw_spin_unlock_irq //使能本地中断
->if (mm)
mmdrop(mm) //有借有还 借用的mm现在归还
->if (unlikely(prev_state == TASK_DEAD)) { //前一个进程是死亡状态
put_task_stack(prev); //如果内核栈在task_struct中 释放内核栈
put_task_struct_rcu_user(prev); //释放前一个进程的task_struct占用内存
}
可以看到进程被重新调度时首先需要做的主要是:
重新使能本地中断 ,进程被重新调度时,本地cpu中断是被重新打开的!!!
如果有借用mm的情况,现在归还 如果前一个是内核线程,在进程地址空间切换时“借用了”某个进程的mm_struct,现在切换到了下一个进程,理应归还,归还做的是递减借用的mm_struct的引用计数,引用计数为0就会释放mm_struct占用的内存。
对于上一个死亡的进程现在回收最后的资源, 注意这里是递减引用计数,当引用计数为0时才会真正释放。
主调度器可以说Linux内核进程管理中的核心组件,进程管理的其他部分如抢占、唤醒、睡眠等都是围绕它来运作。在原子上下文不能发生调度,说的就是调用主调度器,但是可以设置抢占标志以至于在最近的抢占点发生调度,如中断中唤醒高优先级进程的场景。主调度器所做的工作就是让出cpu,内核很多场景可以直接或间接调用它,而大体上可以分为两种情况:即为主动调度和抢占式调度。主调度器做了两件事情:选择下一个进程和进程进程上下文切换。选择下一个进程解决选择合适高优先级进程的问题。进程进程上下文切换又分为地址空间切换和处理器状态切换,前者让进程产生独自占用系统内存的错觉,而后者让进程产生独自占用系统cpu的错觉,让系统各个进程有条不紊的共享内存和cpu等资源。
