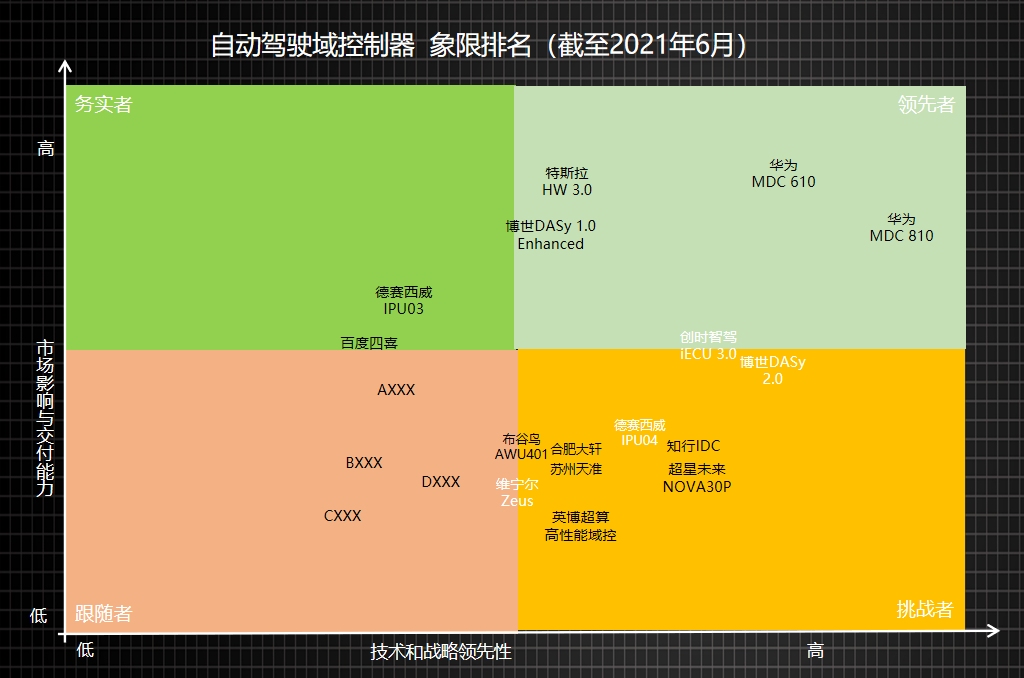
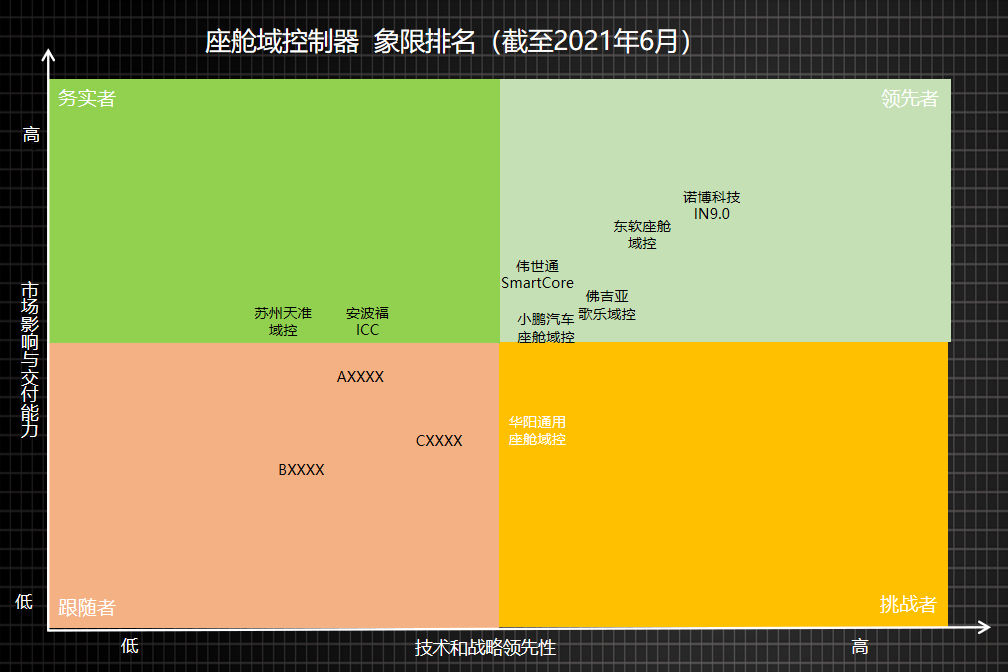
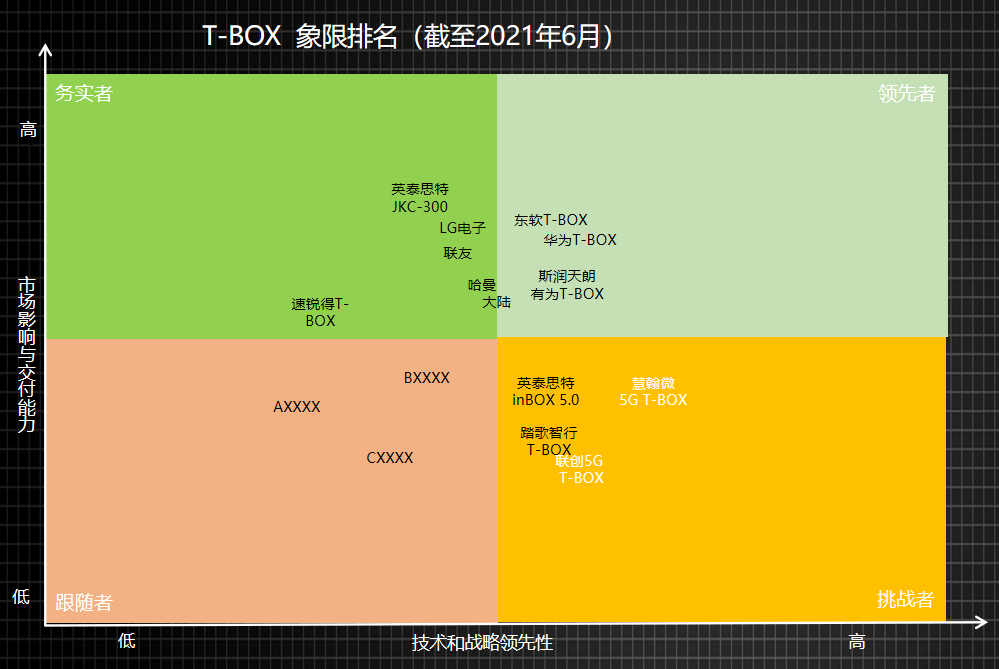
6月份,佐思汽研发布了域控制器和T-BOX的象限排名图。7月份开始,我们将开展传感器(包括单目视觉、毫米波雷达、激光雷达)的金智象限排名和单项排名研究。
根据专家建议,7月份开始的排名研究,参与企业除了提供产品参数表,还需要提供相应的图片和视频说明。
参与规则和流程
1、由佐思研究团队和相关专家一起,制订初步的产品参数表格。参与企业填写产品参数表,请提供相关参数的图片或视频说明。
2、佐思研究团队参考产品特点拟定初步排名评分规则,基于企业填写的参数表、图片和视频资料,对各企业提交产品进行初步评分。
● 参选产品需为2020-2022年上市的产品;
● 具体产品参数包括核心部件及参数、核心软件及参数、关键技术指标、主要接口、认证情况、生产能力、客户案例、出货量等等;
● 各参数评分汇总为两个维度:市场影响与交付能力,技术领先性,以这两个维度为基础,画出“象限排名图”。
3、评审专家(以主机厂专家为主)根据佐思团队提供的评分规则和初步评分,首先书面回复自己的专业意见,然后佐思研究团队和每位专家进行深入沟通,得到最终评分规则。
4、基于专家审核的最终评分规则,佐思市场团队将初步结果反馈给参与企业,参与企业可根据最终评分规则补充材料。
5、基于参与企业的反馈,佐思研究团队最后得出某项产品的“象限排名图”和“单项排名表”,并撰写排名分析报告。
6、佐思汽研在公众号发布某项产品的“象限排名图”和“单项排名表”。
7、基于以上排名,佐思向部分优秀企业颁发eg:金智技术领先奖、金智市场领先奖等奖项。
单目视觉排名参数
技术领先性的参数(仅列出部分参数)
图像传感器型号 | Sony、Samsung、Aptina等 |
串行器型号 | 美信、TI等 |
像素尺寸 | 芯片像元阵列上的每个像素的实际物理尺寸 |
颜色类型 | RCCB、RYYCY |
分辨率(pixel) | 摄像头能支持到的最大图像大小 |
探测距离(m) | 探测多远距离 |
水平视场角(°) | 探测的水平角度 |
垂直视场角(°) | 探测的垂直角度 |
帧率(fps) | 每秒钟刷新图像的次数 |
IRCF滤光片 | |
曝光方式 | 图像芯片暴露在光线里时间的多少 |
最低照度(lux) | 正常成像时所需要的最暗光线 |
动态范围(dB) | 可探测明暗的范围,即正常显示细节的最亮和最暗物体的亮度值区间 |
LED抑制 | 防止LED闪烁 |
信噪比(SNR) | 输出信号电压与同时输出的噪声电压的比值 |
自动增益 | 图像芯片所到的光电信号的放大倍数 |
自动曝光 | 自动调节曝光时间、光圈、增益(ISO)进行曝光 |
自动白平衡 | 摄像头对白色物体的还原 |
支持ADAS功能 | LDW,FCW,PCW,TSR等 |
镜头材质 | 通常摄像头用的镜头构造有:1P、2P、1G1P、1G2P、2G2P、4G等。 |
镜头疏水性 | 防止凝水 |
光学畸变率 | 镜头对物体所成的像相对于物体本身而言的失真程度,只引起像的变形 |
MTF | 评判镜头还原物体对比度的能力 |
通信方式 | CAN或者I2C或者LVDS |
功耗(W) | 单位时间中所消耗能源的数量 |
工作电压(V) | 一般9到16V |
供电方式 | POC供电 |
工作电流(mA) | 摄像头正常工作的电流 |
静态电流(mA) | 摄像头待机状态下的电流 |
数据类型 | RAW DATA |
信号类型 | GMSL2或者其他 |
图像输出延时(ms) | 图像产生的并输出的时间 |
工作温度(℃) | 正常工作的一个温度范围 |
存储温度(℃) | 运输存储的温度范围 |
防水防尘等级(IP) | 防水防尘IPXX |
尺寸(mm) | 单目整体尺寸大小 |
重量(mg) | 单目整体重量 |
连接器类型 | Fakra或者其他 |
| 使用寿命(年) | 设计寿命需要大于产品的使用寿命 |
| 功能安全(ASIL B) | 模组的功能安全等级 |
| 识别目标个数(个) | 智能摄像头适用,能够识别的目标个数 |
| 识别车道线数量 | 智能摄像头适用,能够识别的车道线数量 |
| 车道标线的识别种类及识别距离 | 智能摄像头适用,能够识别的车道线种类和识别距离,黄色实线,双黄线,虚线 |
空中交通标志识别种类和识别距离(m) | 智能摄像头适用,能够识别的空中交通标志种类,交通标志远近 |
地面交通标志识别种类和识别距离(m) | 智能摄像头适用,能够识别的地面交通标志种类(导向箭头、斑马线、停车线等),交通标志远近 |
............... | .............................. |
市场影响与交付能力的参数
出货量 | 2020-2021上半年出货量,数十20分,数百 40分,数千 60分,数万 80分,数十万 100分 |
体系认证 | 车规认证 |
生产能力 | 自主生产,外包生产 |
量产时间 | 量产的时间 |
量产能力(量产经验、产能) | 量产经验一般+30,量产经验丰富+50; |
售后返件(PPM) | 百万出货量的返件数目 |
定点客户数量 | 定点1-4家 20分,定点5-9家 40分,定点10-14家 60分,定点15-19家80分,定点20家以上 100分 |
订单情况 | 2021下半年-2022年订单数量,数十20分,数百 40分,数千 60分,数万 80分,数十万 100分 |
子零件配套能力 | 配套能力非常强 80分,配套能力强 60分,配套能力一般40分,配套能力较弱20分 |
关键部件本土化生产能力 | 国产化比例,哪些关键零部件实现了国产化替代 |
关键部件独立设计和生产能力 | 哪些关键零部件可以独立设计或生产 |
毫米波雷达排名参数
技术领先性的参数(仅列出部分参数)
中心频率(GHz) | 车载毫米波雷达的工作频率,一般为 24GHz 和77GHz |
带宽(Hz) | 毫米波雷达数据传输的能力,数值越大,数据传输能力越大 |
几发几收(X Tx, X Rx) | 毫米波雷达发射天线和接收天线数量 |
最大检测目标数量(个) | 毫米波雷达同一时间多目标检测的能力,数值越大,多目标检测能力越强 |
探测最大距离(m) | 毫米波雷达的工作距离,数值越大工作距离越长 |
探测最小距离(m) | 毫米波雷达的最小探测距离 |
探测距离精度(m) | 测距精度,它是由回波信号的信噪比SNR决定的 |
探测距离分辨率(m) | 毫米波雷达在距离维度上区分两个同一位置的目标的能力,数值越小,精度越高,雷达的距离分辨率是由脉冲的宽度决定的 |
探测相对速度(km/h) | 毫米波雷达测试目标的速度范围 |
探测相对速度精度(m/s) | 毫米波雷达测试目标的速度最小区分单位 |
探测相对速度分辨力(m/s) | 毫米波雷达在速度维的维度区分两个同一位置的目标的能力,数值越小精度越高 |
水平视场/方位角(°) | 毫米波雷达工作的水平角度范围,数值越大毫米波雷达工作的水平覆盖范围越大 |
方位角精度(°) | 毫米波雷达工作的水平角度最小区分单位 |
方位角分辨率(°) | 毫米波雷达工作的水平角度区分两个同一位置的目标的能力,数值越小精度越高 |
垂直视场/俯仰角(°) | 毫米波雷达工作的垂直角度范围,数值越大毫米波雷达工作的垂直覆盖范围越大 |
俯仰角精度(°) | 毫米波雷达工作的垂直角度最小区分单位 |
俯仰角分辨率(°) | 毫米波雷达工作的垂直角度区分两个同一位置的目标的能力,数值越小精度越高 |
刷新时间(ms) | 毫米波雷达数据传输的频率 |
目标置信度 | 毫米波雷达检测的目标可靠度 |
目标种类 | 毫米波雷达检测的目标类别 |
目标加速度(m/s2) | 毫米波雷达检测的目标角速度 |
纵向速度误差(m/s) | 毫米波雷达纵向速度偏差 |
纵向加速度误差(m/s2) | 毫米波雷达纵向加速度偏差 |
原始点云或簇 | 毫米波雷达原始探测点以及聚类输出 |
静止目标输出 | 毫米波雷达静止目标 |
直角坐标系 | 平面直角坐标系 |
极坐标系 | 毫米波雷达的原始数据是基于(距离+角度)极坐标系 |
支持ADAS功能 | 包含但不限于ACC,AEB,LCA, Cut In,Cut Out,FCW, DOW,SCW 以及HPilot中需要雷达的场景 |
通信方式(CAN/CANFD) | CAN/CAN-FD |
功耗(W) | 毫米波雷达满负荷工作时的功率,评估毫米波雷达耗电能力,数值越大越耗电 |
工作电流(mA) | 毫米波雷达正常工作的电流 |
峰值功率(W) | 最大功耗 |
静态电流(mA) | 毫米波雷达待机状态下的电流 |
唤醒模式 | IO唤醒还是CAN唤醒 |
启动时间(ms) | 上电到目标输出的时间 |
工作温度(℃) | 正常工作的一个温度范围 |
存储温度(℃) | 运输存储的温度范围 |
防水防尘等级 | 防水防尘IPXX |
............... | .............................. |
市场影响与交付能力的参数
出货量 | 2020-2021上半年出货量,数十20分,数百 40分,数千 60分,数万 80分,数十万 100分 |
体系认证 | 车规认证 |
生产能力 | 自主生产,外包生产 |
量产时间 | 量产的时间 |
量产能力(量产经验、产能) | 量产经验一般+30,量产经验丰富+50; |
售后返件(PPM) | 百万出货量的返件数目 |
定点客户数量 | 定点1-4家 20分,定点5-9家 40分,定点10-14家 60分,定点15-19家80分,定点20家以上 100分 |
订单情况 | 2021下半年-2022年订单数量,数十20分,数百 40分,数千 60分,数万 80分,数十万 100分 |
子零件配套能力 | 配套能力非常强 80分,配套能力强 60分,配套能力一般40分,配套能力较弱20分 |
关键部件本土化生产能力 | 国产化比例,哪些关键零部件实现了国产化替代 |
关键部件独立设计和生产能力 | 哪些关键零部件可以独立设计或生产 |
激光雷达排名参数
技术领先性的参数(仅列出部分参数)
技术实现方式 | 机械式、Flash、MEMS等 |
线束数量(或等效) | 多线数激光雷达,线束越多、越密,对环境描述更加充分 |
发射波长(nm) | 激光雷达常用波长是905nm和1550 nm |
安全等级 | 激光雷达的安全等级是否满足Class 1 |
探测距离(@10%反射率) | 一般指激光雷达对于 10%低反射率目标物(标准朗伯体反射能量的比例)的最远探测距离 |
水平视场角(°) | 激光雷达探测覆盖的水平角度范围 |
垂直视场角(°) | 激光雷达探测覆盖的垂直角度范围 |
水平角分辨率(°) | 激光雷达相邻两个探测点之间的水平角度间隔 |
垂直角分辨率(°) | 激光雷达相邻两个探测点之间的垂直角度间隔 |
帧率(fps) | 帧率指扫描频率,表示一秒内雷达进行多少次扫描,其计量单位是HZ |
点云数量 | 激光雷达每秒完成探测获得的探测点的数目 |
距离精度(m) | 激光雷达对同一距离下的物体多次测量所得数据之间的一致程度 |
功耗(W) | 激光雷达系统工作状态下所消耗的电功率 |
工作电压(V) | 一般9到16V |
供电方式 | 域控制器或者直连 |
工作电流(mA) | 激光雷达正常工作的电流 |
峰值功率(W) | 最大功耗 |
静态电流(mA) | 激光雷达待机状态下的电流 |
唤醒模式 | 网络唤醒或者硬件唤醒 |
启动时间(ms) | 上电到点云输出的时间 |
工作温度范围(℃) | 正常工作的一个温度范围 |
存储温度(℃) | 运输存储的温度范围 |
防水防尘等级 | 防水防尘IPXX |
尺寸(mm) | 激光雷达整体尺寸 |
重量(mg) | 激光雷达整体重量 |
功能安全(ASIL B) | 模组的功能安全等级 |
市场影响与交付能力的参数
出货量 | 2020-2021上半年出货量,数十20分,数百 40分,数千 60分,数万 80分,数十万 100分 |
体系认证 | 车规认证 |
生产能力 | 自主生产,外包生产 |
量产时间 | 量产的时间 |
量产能力(量产经验、产能) | 量产经验一般+30,量产经验丰富+50; |
售后返件(PPM) | 百万出货量的返件数目 |
定点客户数量 | 定点1-4家 20分,定点5-9家 40分,定点10-14家 60分,定点15-19家80分,定点20家以上 100分 |
订单情况 | 2021下半年-2022年订单数量,数十20分,数百 40分,数千 60分,数万 80分,数十万 100分 |
子零件配套能力 | 配套能力非常强 80分,配套能力强 60分,配套能力一般40分,配套能力较弱20分 |
关键部件本土化生产能力 | 国产化比例,哪些关键零部件实现了国产化替代 |
关键部件独立设计和生产能力 | 哪些关键零部件可以独立设计或生产 |
配套软件工具能力 | 是否提供点云数据处理,以及其他配套工具和算法 |
联系我们
企业参与金智排名活动,请联系佐思市场部门。
卓 亮 13811103327(同微信)
佐 研 君 18600021096(同微信)
佐 才 君 15313151110(同微信)
