点击上方↑↑↑“OpenCV学堂”关注我
来源:公众号 因特尔网联网 授权
姿态评估技术与框架
姿态评估(Pose estimation)是计算机视觉的研究热点之一,姿态评估的算法应用主要可以分为两部完成,第一步是对象检测,对象区域的定位与查找,截取图像ROI,第二步是根据对象检测定位截取ROI区域作为输入,完成姿态评估与预测。当前主要用于姿态评估的深度学习网络框架有以下几种:
OpenPose框架:
是一个开源的姿态评估算法框架,支持多任姿态评估,可以实现实时的人体对象检测、身体、头部、手部姿态评估与人脸关机点检测,支持2D与3D,简易的C++接口调用与自定义训练。
DeepCut框架:
跟OpenPose类似的姿态评估框,支持多人检测与姿态评估,特别是在图像与视频中运动场景下,包括足球与篮球运动场景。
其它的类似框架还包括有AlphaPose、DeepPose、PoseNet等。姿态评估算法主要应用场景在移动机器人、虚拟现实、人体跌倒检测、危险动作识别、机器人动作训练、活体验证等。
OpenVINO™ 2021.02版本中涉及到姿态评估方面的支持主要有下列几个预训练模型:
模型名称 | 模型说明 |
head-pose-estimation-adas-0001 | 头部姿态评估,简单的全卷积网络 |
human-pose-estimation-0001 | 基于OpenPose, MobileNetv1做特征提取,18对关键点 |
human-pose-estimation-0002 | 基于EfficientHRNet,17对关键点检测 |
human-pose-estimation-0003 | 基于EfficientHRNet,17对关键点检测 |
human-pose-estimation-0004 | 基于EfficientHRNet,17对关键点检测 |
表-1
从human-pose-estimation-0002到human-pose-estimation-0004输入图像的分辨率增大,计算复杂度增加,检测精度提升。从human-pose-estimation-0001到human-pose-estimation-0004都支持多人的姿态评估。OpenVINO™ 通过上述五个模型实现基本的人体姿态评估需求。这里我们以头部姿态评估为例来完成姿态评估模型的OpenVINO™ 部署与代码演示。
头部姿态评估模型
OpenVINO™ 支持的头部姿态评估模型head-pose-estimation-adas-0001的输入与输出格式分别如下:
输入格式为NxCxHxW=1x3x60x60,期望的彩色图像通道顺序BGR、大小为60x60
输出层名称与格式如下:
name: "angle_y_fc", shape: [1, 1] - Estimated
name: "angle_p_fc", shape: [1, 1] - Estimated pitch
name: "angle_r_fc", shape: [1, 1] - Estimated roll
在三个维度方向实现头部动作识别,它们分别是:
pitch是俯仰角,是“点头“
yaw是偏航角,是‘摇头’
roll是旋转角,是“翻滚
它们的角度范围分别为:YAW [-90,90], PITCH [-70,70], ROLL [-70,70]
这三个专业词汇其实是来自无人机与航空领域,计算机视觉科学家一大爱好就是搞新词,就把它们借用到头部姿态评估中,它们的意思图示如下:
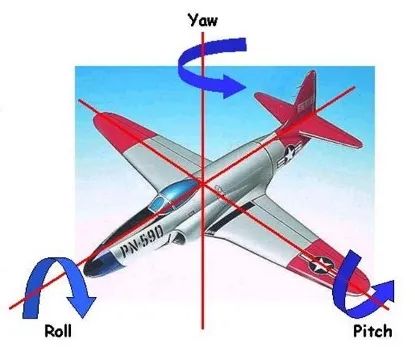
图-1(来自网络)
对应到头部姿态评估中:
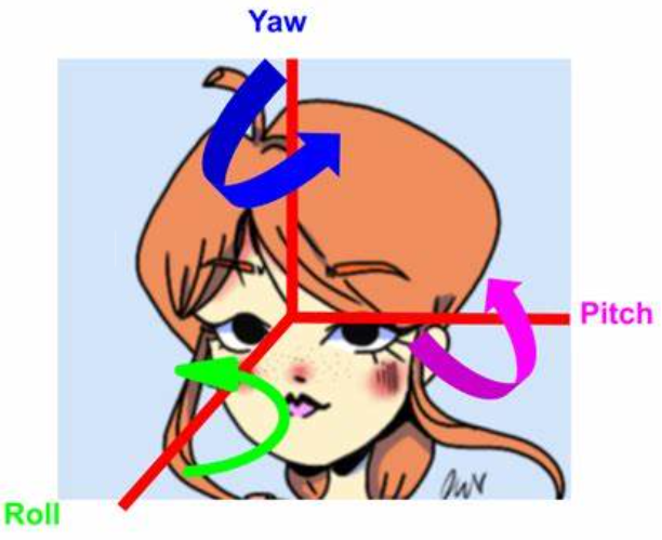
图-2 (来自网络)
该网络模型的格式通过Netron查看之后你会发现就是一些简单的Conv-ReLU-BN的叠加,最后是一个多任务的分支输出,模型结构跟2017年一篇论文里面的模型有点相似,我大胆猜测一波,OpenVINO™ 头部姿态模型的开发者肯定是了解过此篇论文的,论文地址如下:
https://arxiv.org/pdf/1710.00925.pdf
论文中给出的模型结构如下:
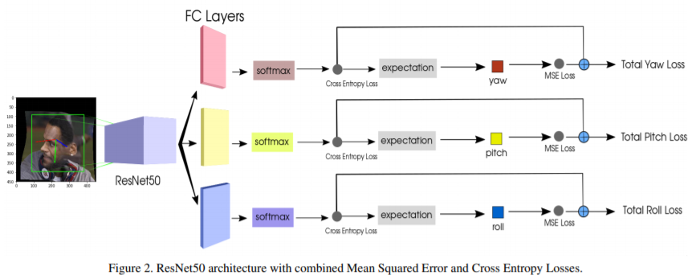
图-3
(来自论文Fine-Grained Head Pose Estimation Without Keypoints)
可以看到它的backbone部分是ResNet50,在OpenVINO™ 中考虑到图像的输入分辨率与速度需求ResNet50的backbone被替换为一些简单的Conv-ReLU-BN叠加。图示如下:
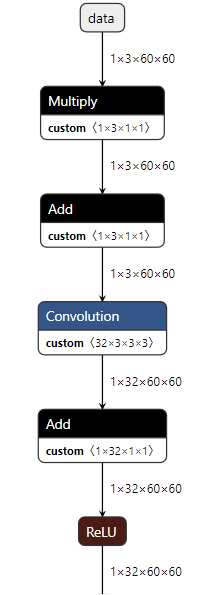
图-4
代码实现
首先需要完成人脸检测,然后把对人脸部分ROI区域适当的向上增加大小之后完成截图,重新resize之后再作为输入头部姿态评估模型推理,得到三个角度,根据角度数值的范围获得最终的头部姿态评估结果。代码实现部分的人脸检测作为上一篇的对象检测部分关联知识,这里就不再展开详细说明。主要说明如何通过人脸检测结果截取ROI区域,调用头部姿态评估模型实现姿态评估、预测解析与结果显示,所以头部姿态评估的代码部分可以分为以下几步,它们分别是:
第一步:加载头部姿态识别模型与设置输入输出格式
// load emotion model
InferenceEngine::CNNNetworkhead_pose_net = ie.ReadNetwork(head_model_xml, head_model_bin);
InferenceEngine::InputsDataMaphead_pose_inputs = head_pose_net.getInputsInfo();
InferenceEngine::OutputsDataMaphead_pose_outputs = head_pose_net.getOutputsInfo();
std::string hp_input_name = "";
for (auto item :head_pose_inputs) {
hp_input_name = item.first;
auto input_data = item.second;
input_data->setPrecision(Precision::U8);
input_data->setLayout(Layout::NCHW);
}
for (auto item :head_pose_outputs) {
auto output_data = item.second;
output_data->setPrecision(Precision::FP32);
}
第二步:获取可执行网络与推理请求
auto executable_hp_network = ie.LoadNetwork(head_pose_net, "CPU");
auto hp_request = executable_hp_network.CreateInferRequest();
第三步:截取输入、推理与解析输出
// check out of boundary
if (box.x< 0) {
box.x = 0;
}
if (box.y< 0) {
box.y = 0;
}
if ((box.width + box.x) >= curr_frame.cols) {
box.width = curr_frame.cols - box.x;
}
if ((box.height+ box.y) >= curr_frame.rows) {
box.height = curr_frame.rows - box.y;
}
fetch_head_pose(curr_frame, hp_request, box, hp_input_name);
其中fetch_head_pose函数方法的代码实现如下:
void fetch_head_pose(cv::Mat &image, InferenceEngine::InferRequest&request, cv::Rect&face_roi,
std::string &e_input) {
cv::Mat faceROI = image(face_roi);
auto blob = request.GetBlob(e_input);
matU8ToBlob<uchar>(faceROI, blob);
request.Infer();
// output prase
auto output1 = request.GetBlob("angle_y_fc");
auto output2 = request.GetBlob("angle_p_fc");
auto output3 = request.GetBlob("angle_r_fc");
const float* y_pred = static_cast<PrecisionTrait<Precision::FP32>::value_type*>(output1->buffer());
const float* p_pred = static_cast<PrecisionTrait<Precision::FP32>::value_type*>(output2->buffer());
const float* r_pred = static_cast<PrecisionTrait<Precision::FP32>::value_type*>(output3->buffer());
std::string head_pose = "";
if (p_pred[0] > 20 || p_pred[0] < -20) {
head_pose += "pitch, ";
}
if (r_pred[0] > 20 || r_pred[0] < -20) {
head_pose += "roll, ";
}
if (y_pred[0] > 20 || y_pred[0] < -20) {
head_pose += "yaw, ";
}
putText(image, head_pose, face_roi.tl(), cv::FONT_HERSHEY_SIMPLEX, 1.0, Scalar(255, 0, 255), 2, 8);
}
最终程序运行结果如下:
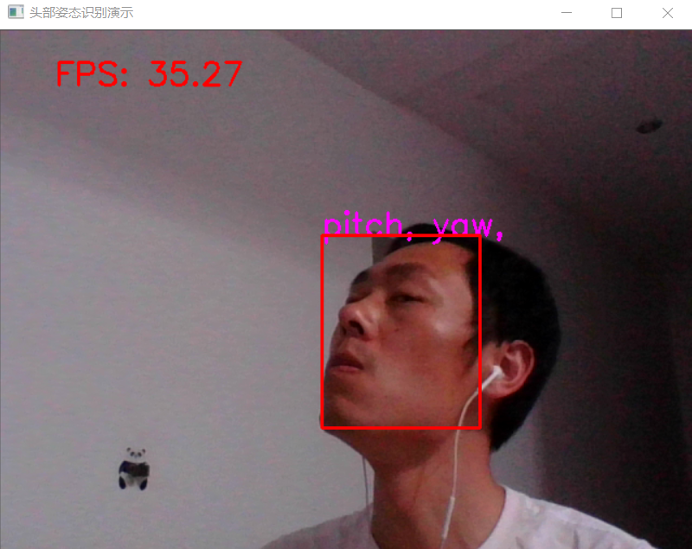
图-5

推荐阅读
OpenCV4 C++学习 必备基础语法知识二
Tensorflow + OpenCV4 安全帽检测模型训练与推理
极简教程 | OpenCV4 C++学习 必备基础语法知识
OpenCV Python + Tesseract-OCR轻松实现中文识别
YOLOv5在最新OpenVINO 2021R02版本的部署与代码演示详解
LesionNet 医疗图像分割网络模型实现皮肤病灶分割
YOLOv5实现自定义对象训练与OpenVINO部署全解析
推理演示 | 八步助你搞定tensorRT C++ SDK调用!
基于OpenCV+ZXing手工打造,FPS300+的二维码识别库
深度解读 OpenCV中的VideoCapture视频读取
极简教程 | OpenCV4 C++学习 必备基础语法知识
OpenCV学堂 | 2020年 原创技术文章汇总
经验 | OpenCV图像旋转的原理与技巧
汇总 | OpenCV DNN模块中支持的分类网络
汇总 | OpenCV DNN支持的对象检测模型
汇总 | OpenCV4中的非典型深度学习模型

