

BearPi-IoT Std 硬件平台LCD-SPI2:
LCD_PWR_PIN B15
LCD_DC_PIN C6
LCD_RES_PIN C7
RW007:
WAN_RI B14
SPI3_NSS A15
SPI3_MISO C11
SPI3_SCK C10
SPI3_MOSI B5
ESP_UART_TX C0
ESP_UART_RX C1
SPI_FLASH:
QSPI_NCS B11
QSPI_CLK B10
QSPI_SI B1
QSPI_SO B0
TF_CARD:
SD_CMD D2
SD_CLK C12
SD_DO C8
KEY & LED:
KEY1 B2
KEY2 B3
LED C13
E53_IA1 :
LED_SW A0
INT B9
Motor_SW B8
I2C_SCL B6
I2C_SDA B7
调试串口:
UART1_TX A9
UART1_RX A10
基于 STM32L431RCT6 新建RTT工程, 基于芯片,使用UART1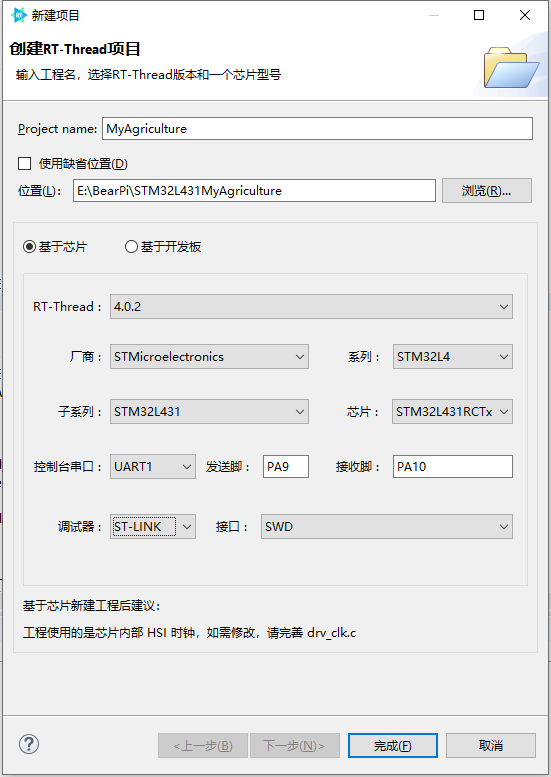
打开CubeMx Settings,如图进行相关配置,包括:时钟,时钟频率 ,代码规则 ,生成工程时的版本MDK5.27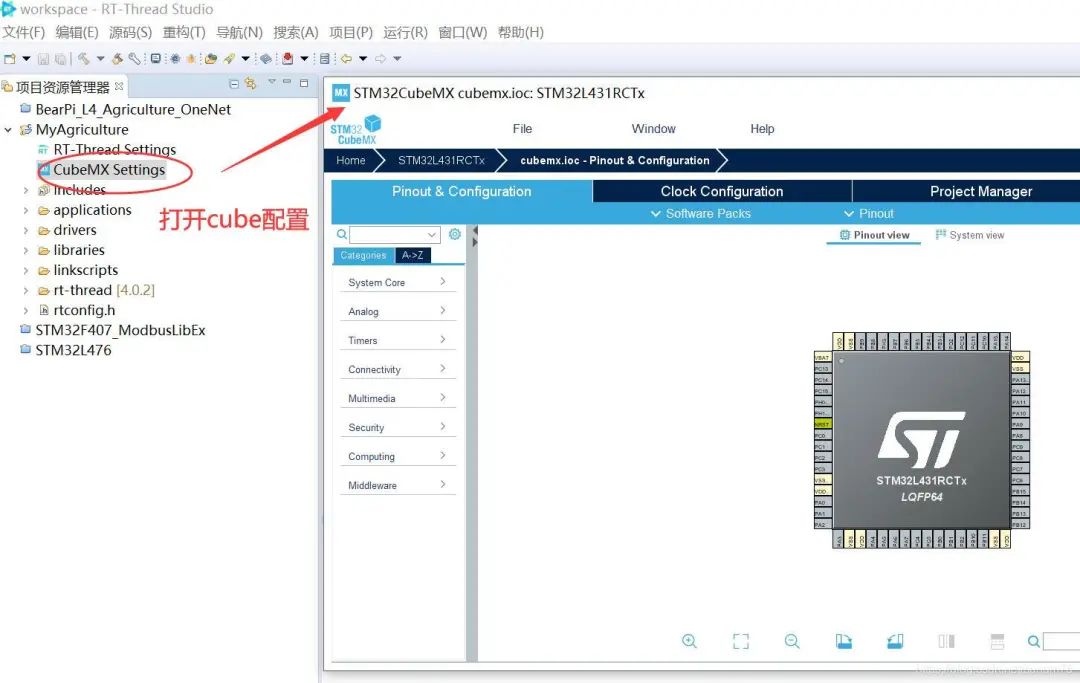 配置使用外部晶振
配置使用外部晶振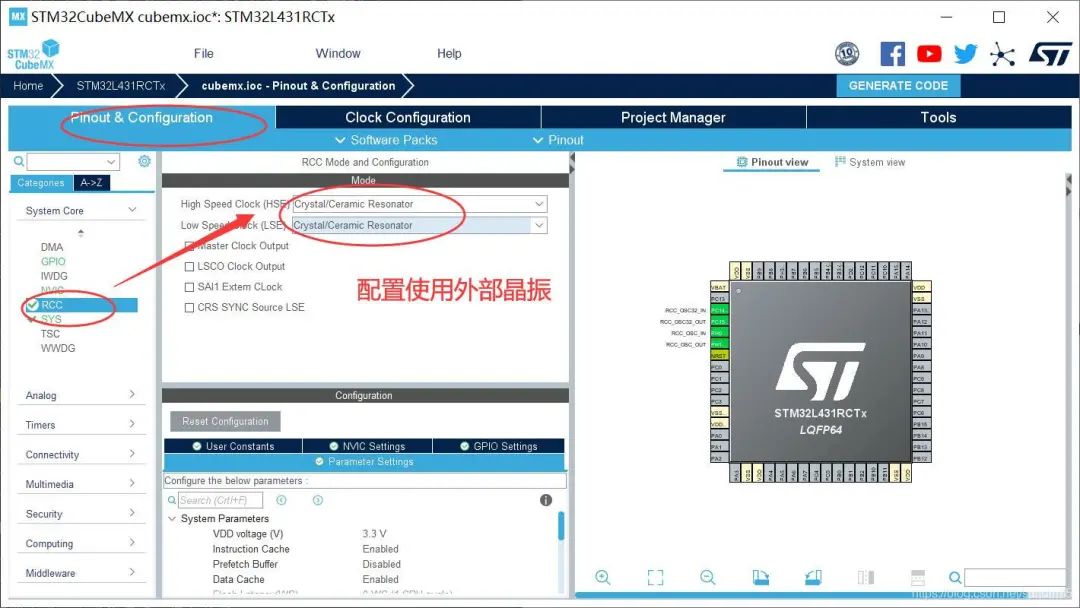 配置主频
配置主频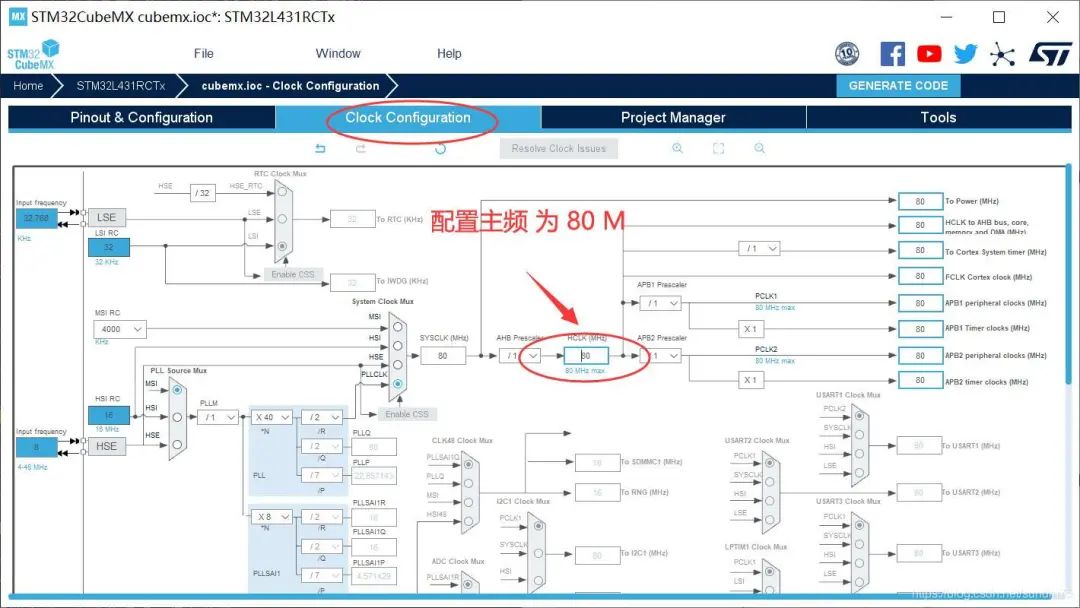 配置代码生成规则
配置代码生成规则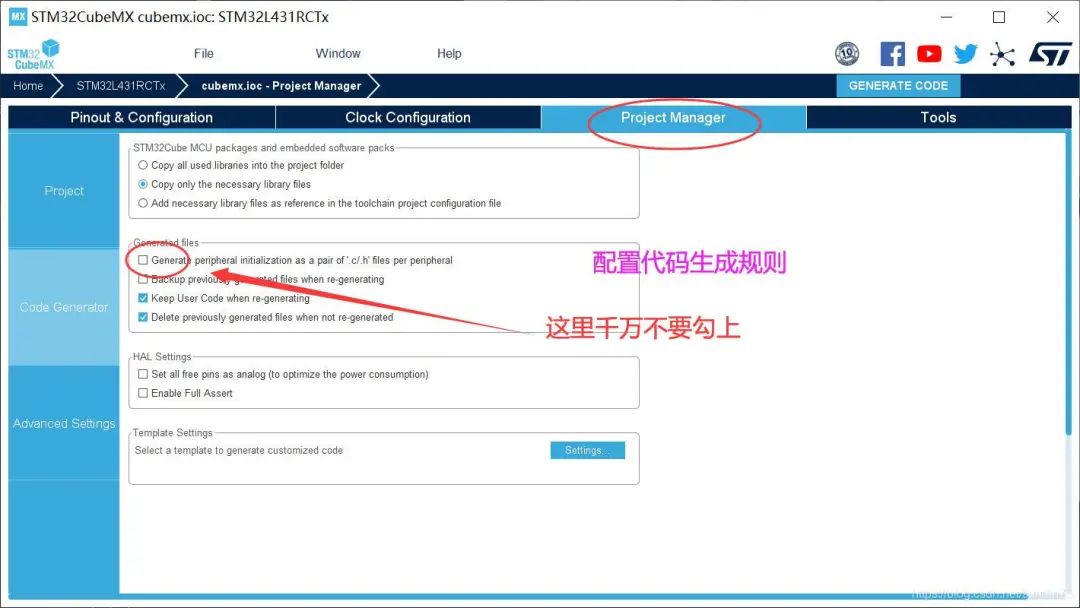 生成工程IDE及版本号
生成工程IDE及版本号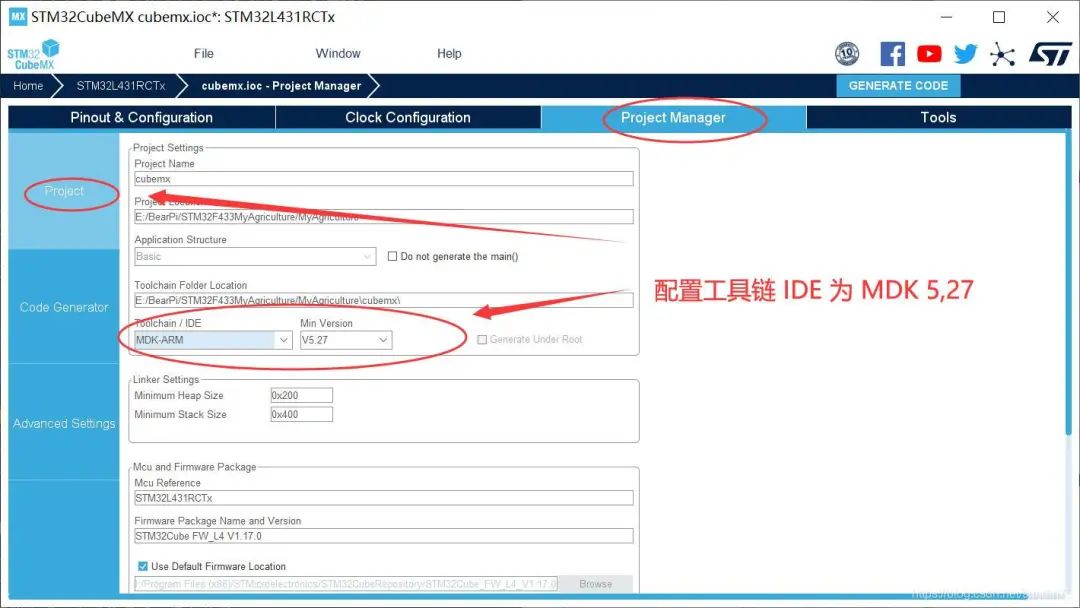 下面配置 串口,GPIO
下面配置 串口,GPIO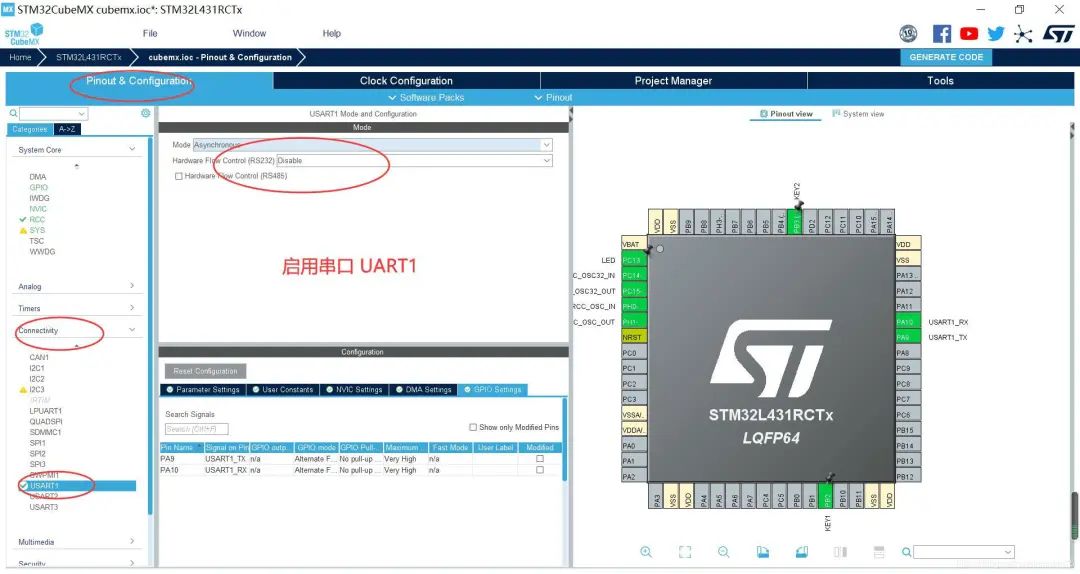 配置KEY
配置KEY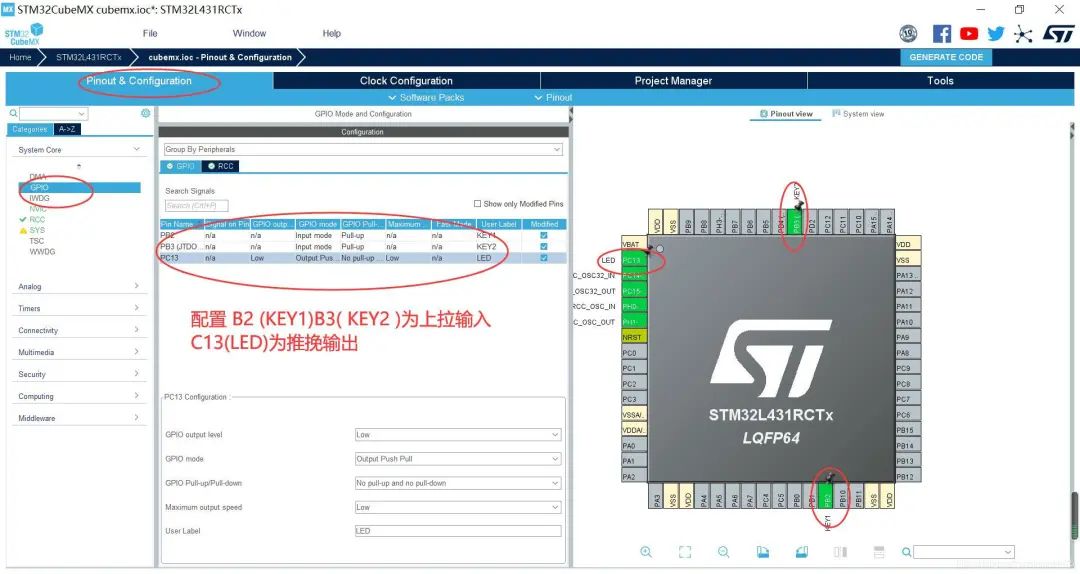 配置完成,生成代码后,保存关闭
配置完成,生成代码后,保存关闭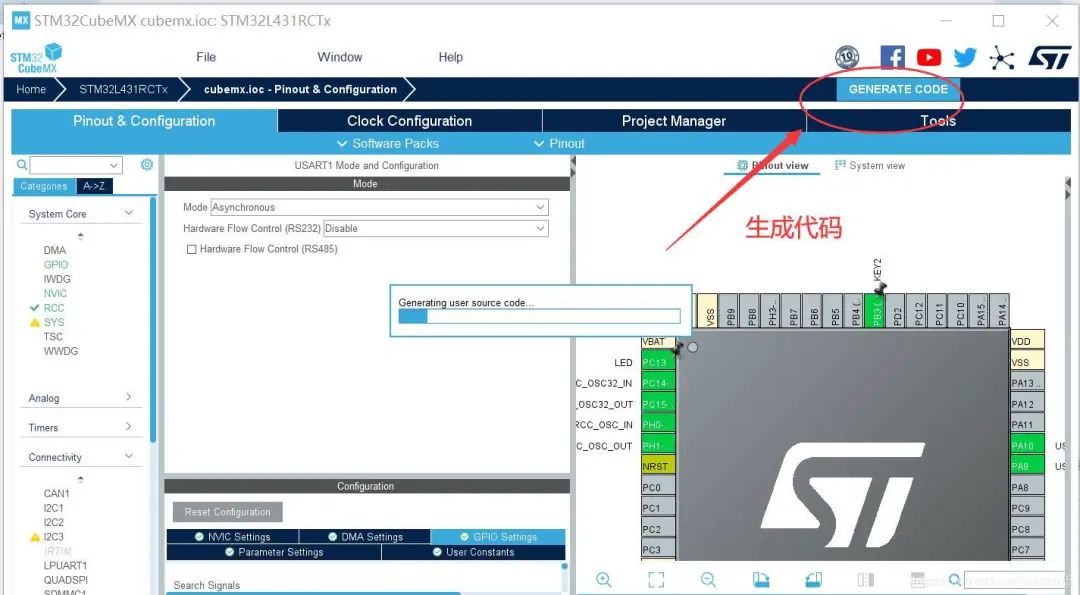 由CubeMx自动生成的初始化代码
由CubeMx自动生成的初始化代码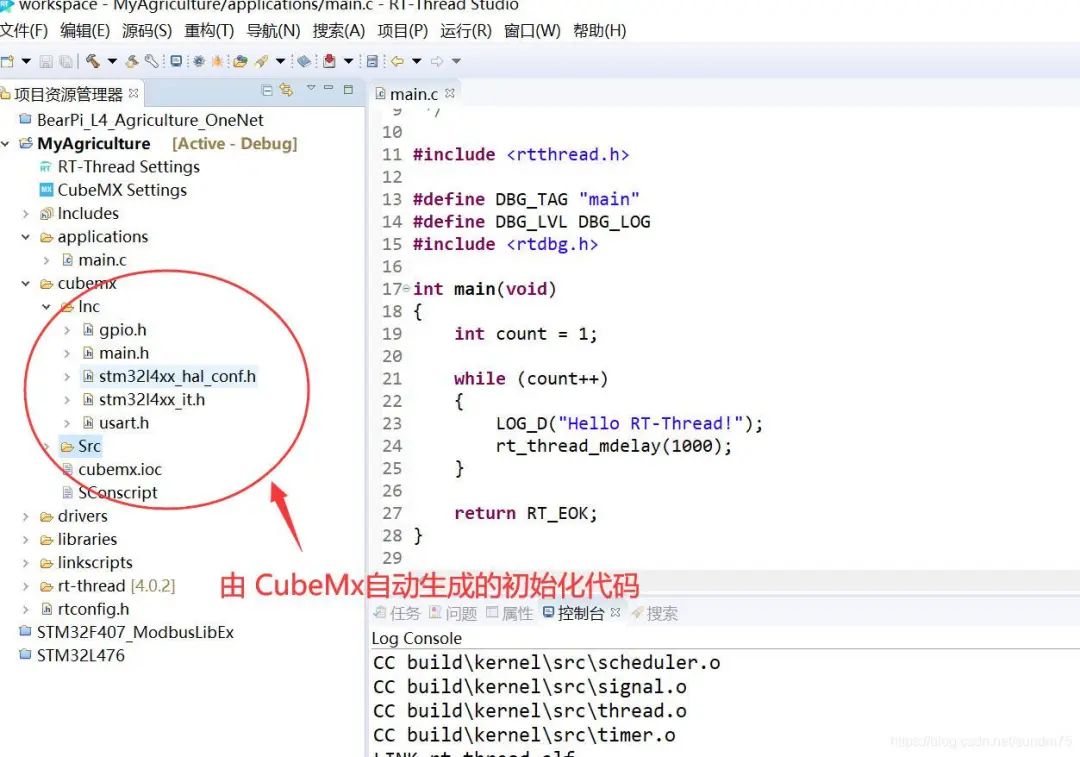 下面编译、下载程序
下面编译、下载程序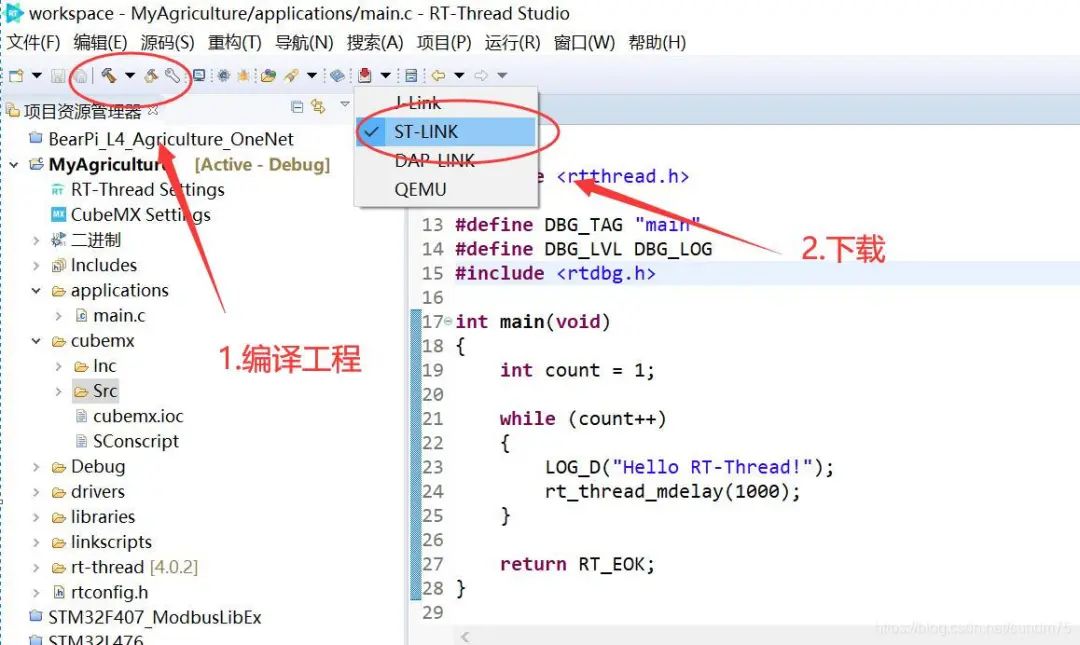 下载程序流程
下载程序流程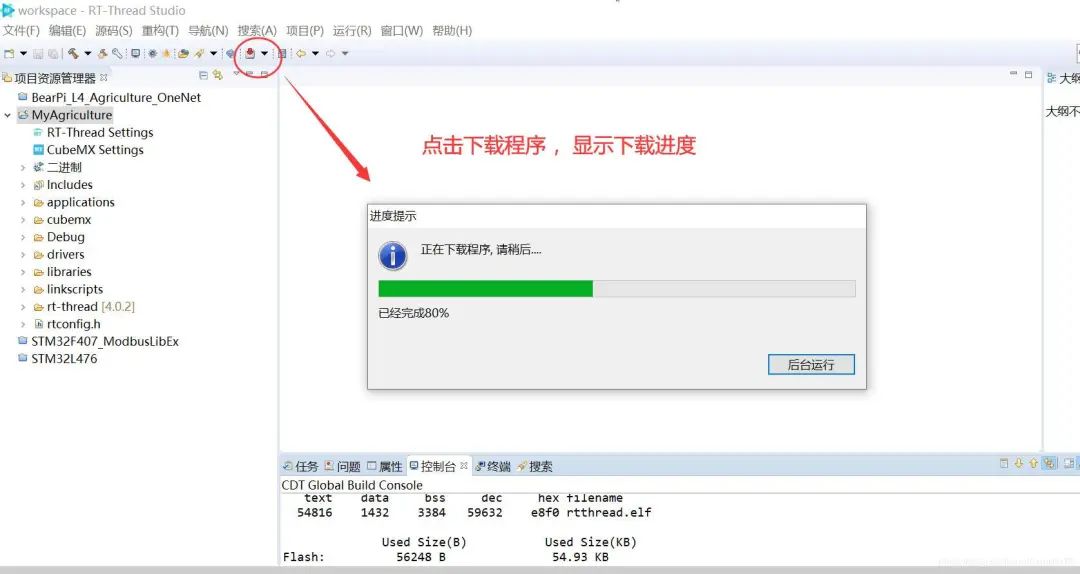 打开终端,配置终端串口
打开终端,配置终端串口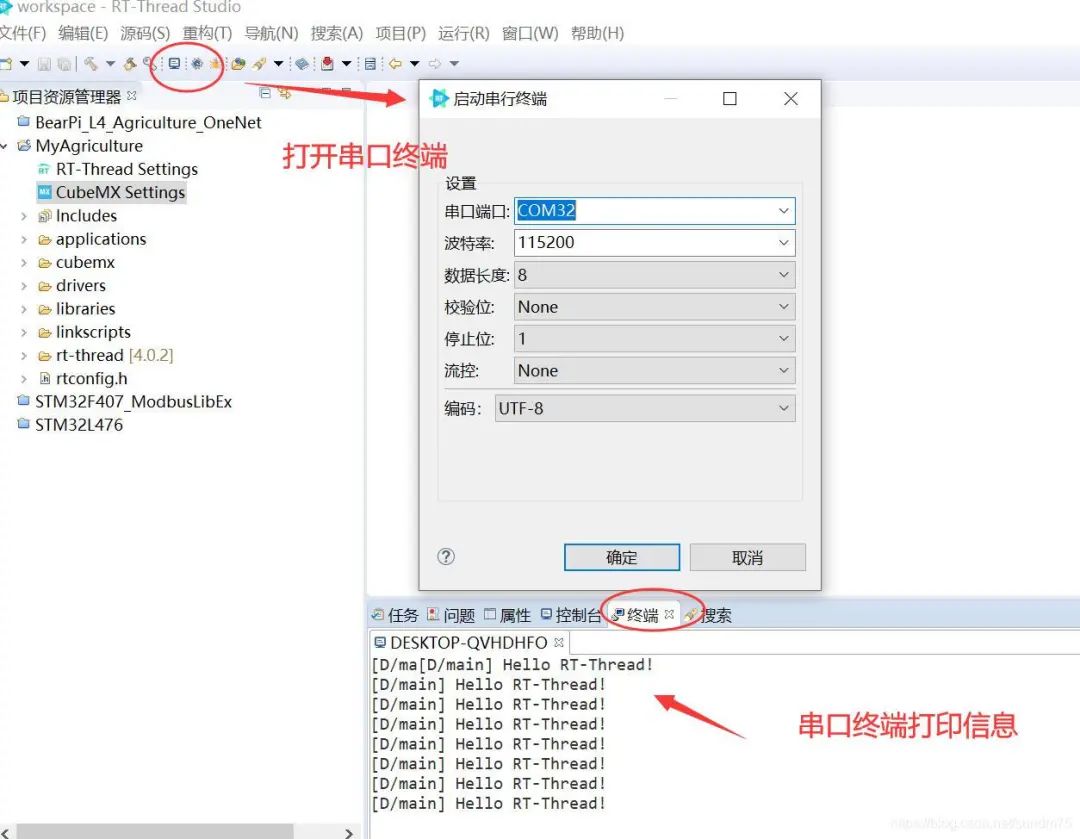
添加相关驱动配置宏,在 board.h 中添加
#define BSP_USING_I2C1
#define BSP_USING_LPUART1
#define BSP_LPUART1_TX_PIN "PC0"
#define BSP_LPUART1_RX_PIN "PC1"
#define RT_USING_SPI
#define BSP_USING_SPI2
进入RTT配置界面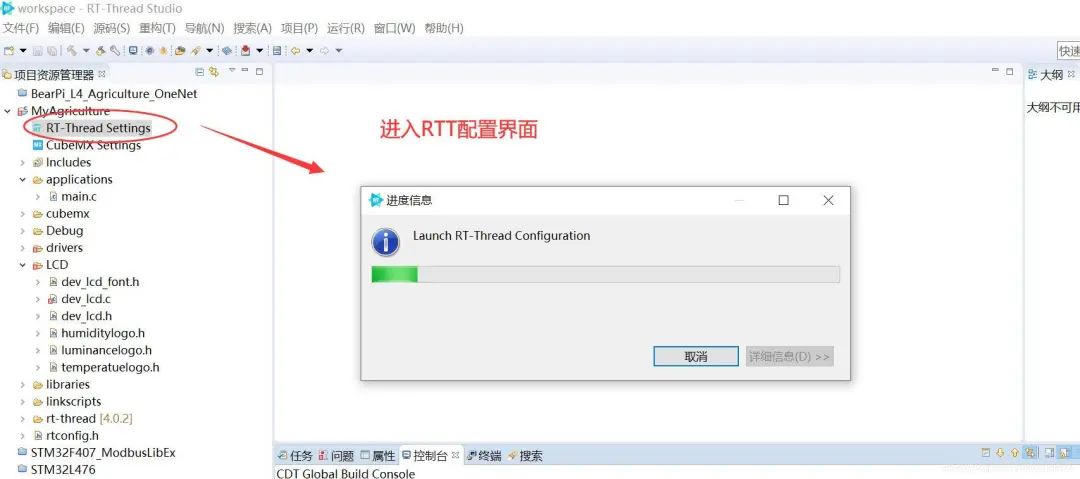
已经添加的组件
添加组件 SPI ,软件模拟 I2C , 传感器,软件包 cjson , webclient, pahomqtt, at_device, bh1750, onenet, sht3x
添加的过程
配置完成后,保存关闭。可进入详细配置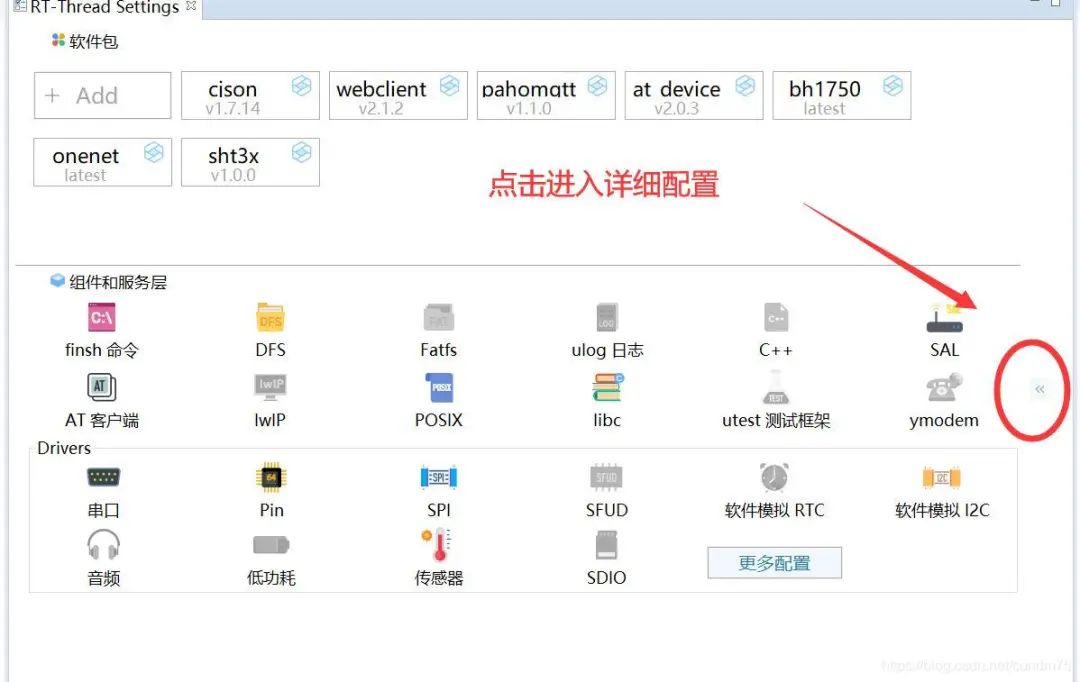
配置 wifi 用户名和密码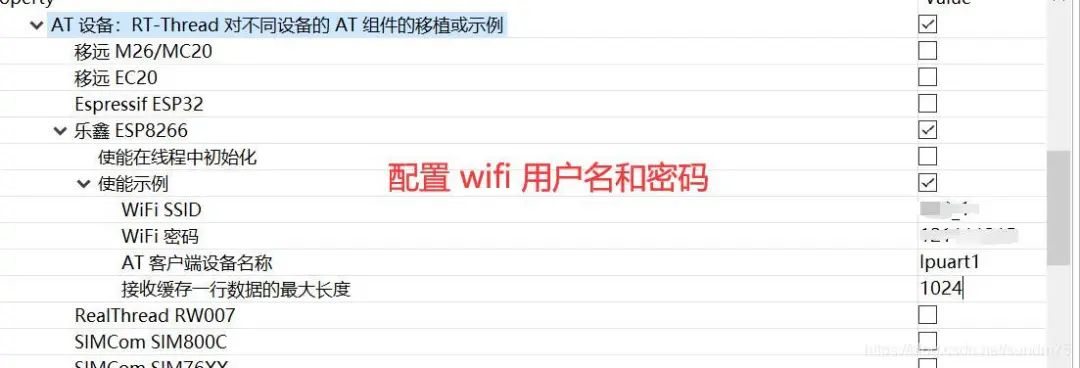
在 CubeMX 中添加 lpuart1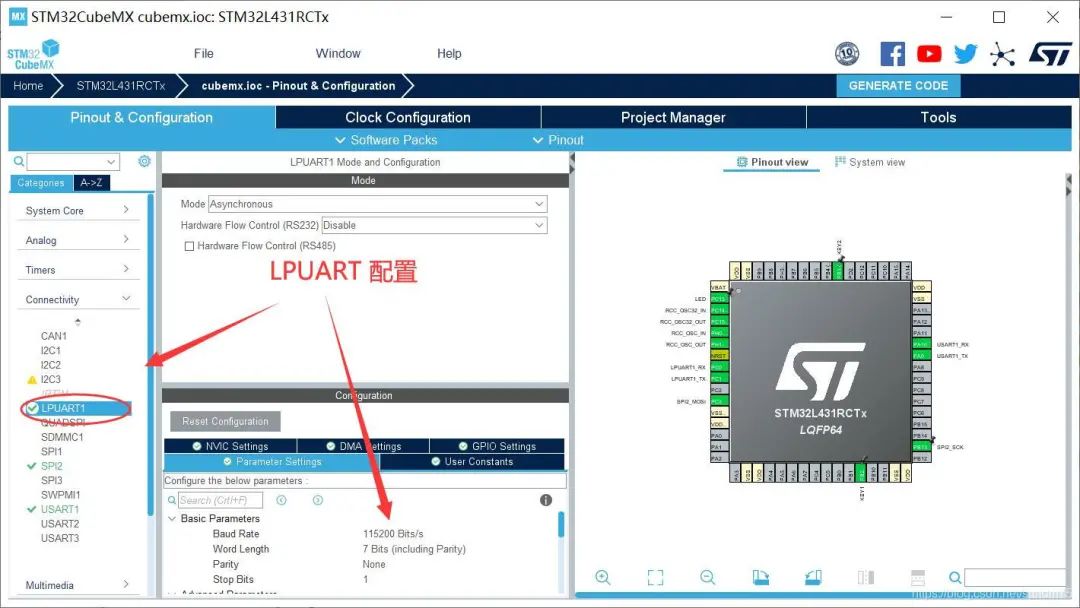
添加LCD使用的spi2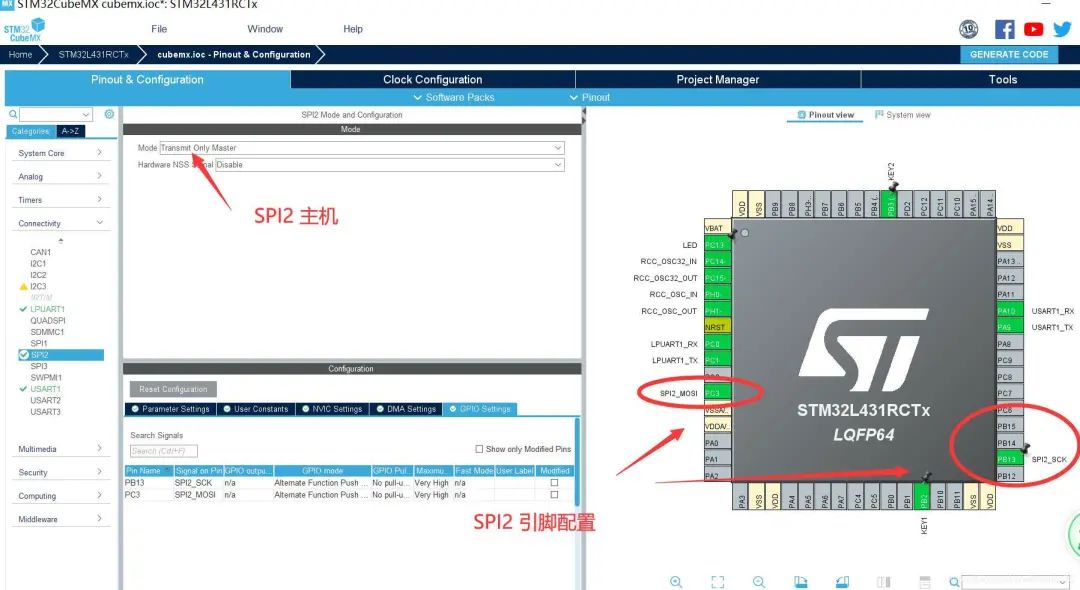
添加LCD的驱动代码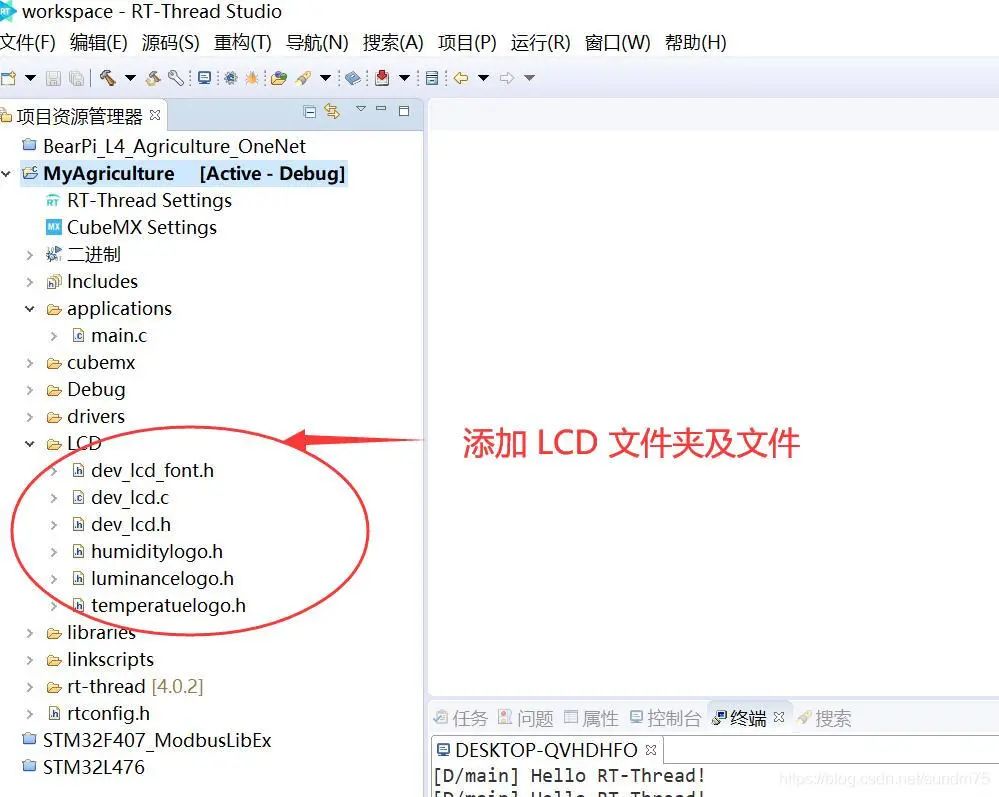
以下均使用i2c1
E53_IA1_bh1750_demo
E53_IA1_sht30_demo
在 RTT Settings 中添加 I2C1
添加LCD的头文件路径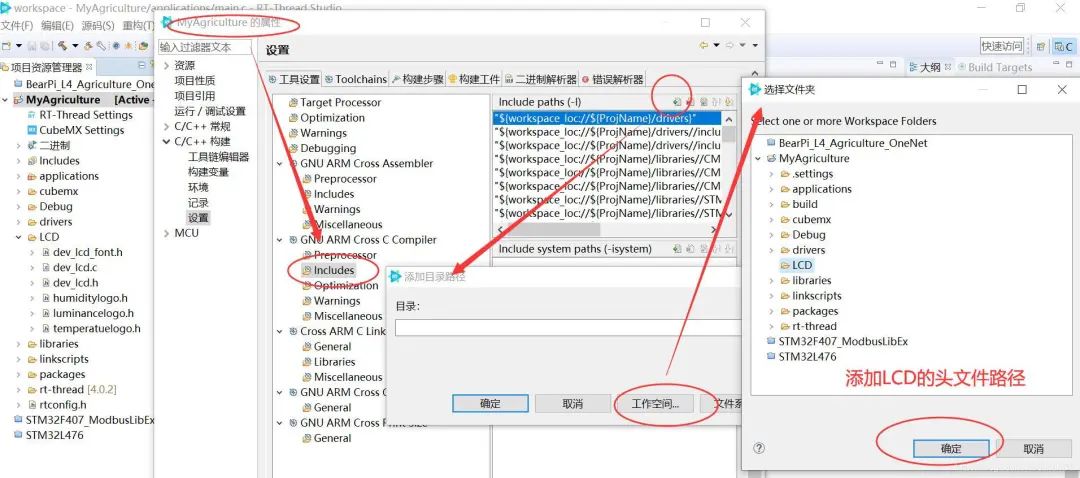
添加 ES53 的引脚
LED_SW A0
Motor_SW B8
LED C13
KEY1 B2
KEY2 B3
修改B2 B3为中断输入 A0 B8 C13 推挽输出
board.h中添加
#define LED0_PIN GET_PIN(C,13)
#define LED1_PINK_PIN GET_PIN(A,0)
#define MOTOR_PIN GET_PIN(B,8)
#define KEY1_PIN GET_PIN(B,2)
#define KEY2_PIN GET_PIN(B,3)
源码:sht3x.c
sht3x_device_t dev_sht30 = RT_NULL;
void E53_IA1_sht30_task_entry(void* par)
{
rt_uint8_t sht_addr = SHT3X_ADDR_PD ;
dev_sht30 = sht3x_init("i2c1", sht_addr);
if(!dev_sht30)
{
rt_kprintf("sht3x probe failed, check input args\n");
}else
{
rt_kprintf("sht3x probed, addr:0x%x\n", sht_addr) ;
}
while(1)
{
if (dev_sht30)
{
/* read the sensor data */
sht3x_read_singleshot(dev_sht30);
// rt_kprintf("sht3x humidity : %d.%d \n", (int)dev_sht30->humidity, (int)(dev_sht30->humidity * 10) % 10);
// rt_kprintf("sht3x temperature: %d.%d \n", (int)dev_sht30->temperature, (int)(dev_sht30->temperature * 10) % 10);
}
else
{
rt_kprintf("Please using 'sht3x probe <i2c dev name> <pu/pd>' first\n");
}
rt_thread_mdelay(1000);
}
}
int E53_IA1_sht30_demo(void)
{
rt_thread_t tid;
tid=rt_thread_create("E53_IA1_sht30_demo", E53_IA1_sht30_task_entry, RT_NULL,2*1024, 20, 7);
if(tid!=RT_NULL)
{
rt_thread_startup(tid);
}
return 0;
}
/* 导出到 msh 命令列表中 */
MSH_CMD_EXPORT(E53_IA1_sht30_demo,E53_IA1_sth30 demo);
源码:bh17650.c
#include "sensor.h"
struct rt_sensor_data bh1750_data;
void E53_IA1_bh1750_task_entry(void *par)
{
rt_device_t dev_bh1750=RT_NULL;
dev_bh1750 = rt_device_find("li_bh1750");
if (dev_bh1750 == RT_NULL)
{
rt_kprintf("Can't find li_bh1750 device\n");
return;
}
/* 以只读模式打开bh1750 */
if (rt_device_open(dev_bh1750, RT_DEVICE_FLAG_RDONLY) != RT_EOK)
{
rt_kprintf("open device failed!");
return;
}
while(1)
{
rt_device_read(dev_bh1750, 0, &bh1750_data, 1);
rt_kprintf("BH1750:%4d.%d lux\n", bh1750_data.data.light / 10, bh1750_data.data.light % 10);
rt_thread_mdelay(1000);
}
}
int E53_IA1_bh1750_demo(void)
{
rt_thread_t tid;
tid=rt_thread_create("E53_IA1_bh1750_demo", E53_IA1_bh1750_task_entry, RT_NULL, 2*1024, 20, 6);
if(tid!=RT_NULL)
{
rt_thread_startup(tid);
}
return 0;
}
/* 导出到 msh 命令列表中 */
//MSH_CMD_EXPORT(E53_IA1_bh1750_demo, E53_IA1_bh1750 demo);
修改 onenet_sample.c, 全部复制
修改main.c ,全部复制。
改rtconfig.h中, onenet的数据配置,这里的数据要根据自己的设备情况进行修改
/* IoT Cloud */
#define PKG_USING_ONENET
#define PKG_USING_ONENET_SAMPLE
#define ONENET_USING_MQTT
#define ONENET_INFO_DEVID "2************4"
#define ONENET_INFO_AUTH "w************e"
#define ONENET_INFO_APIKEY "T************************************="
#define ONENET_INFO_PROID "1************************************9"
#define ONENET_MASTER_APIKEY "X************************************="
#define PKG_USING_ONENET_LATEST_VERSION
如下图所示,根据自己的OneNet产品、设备等填写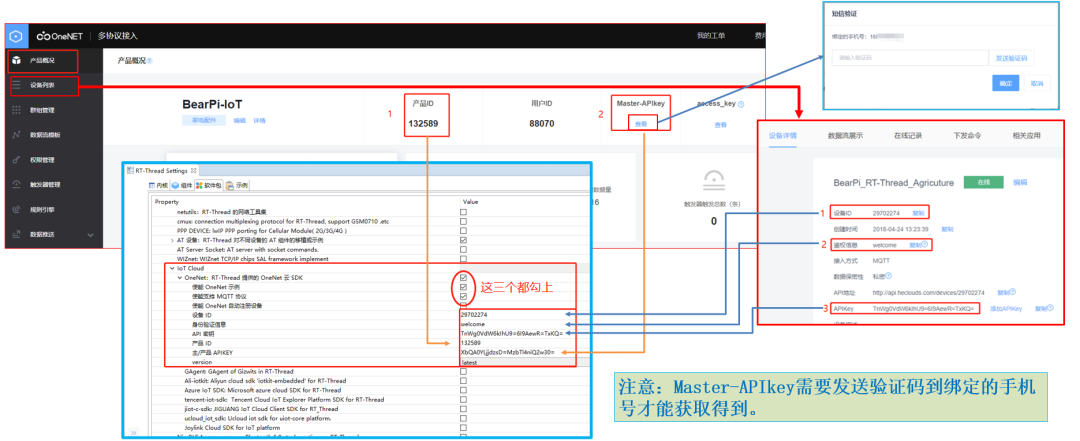
编译后下载,运行。上位机连接网络页面
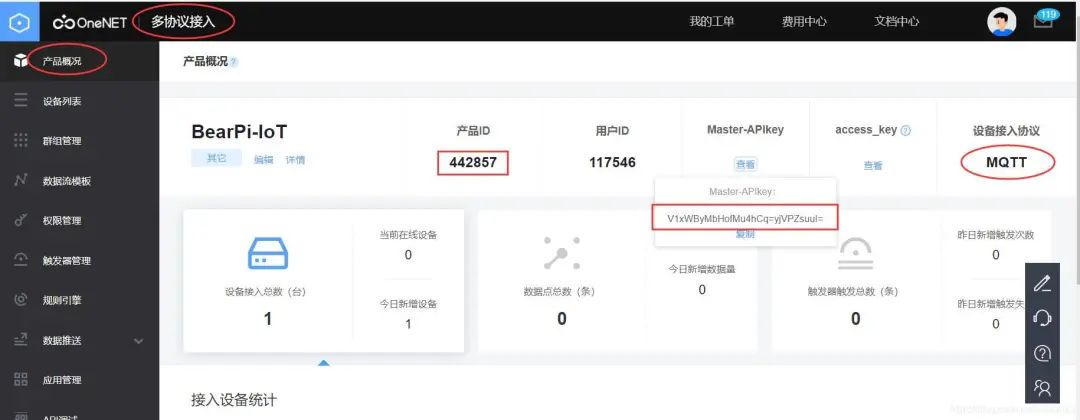
登录 https://open.iot.10086.cn/ 注册账号
从“控制台”进入 “控制台首页” 进入“全部产品服务”再进入“多协议接入” 创建 MQTT 协议的产品“BearPi-IoT”。产品ID PROID: _4******7_ Master-APIKey:_V************************************************=_
进入产品,创建设备“BearPi_RT-Thread_Agriculture”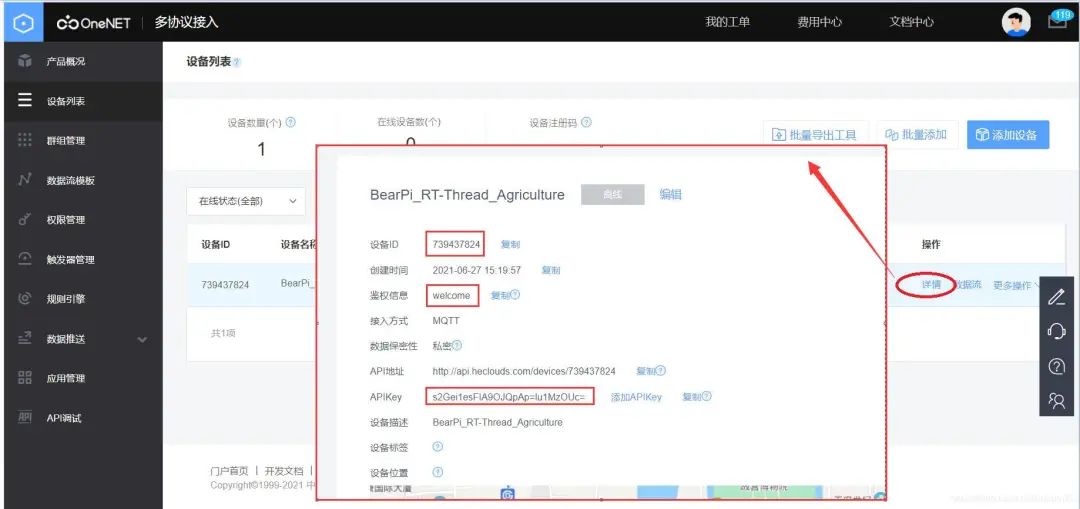
#define ONENET_INFO_DEVID "7************4"
#define ONENET_INFO_AUTH "w************e"
#define ONENET_INFO_APIKEY "s************************************="
#define ONENET_INFO_PROID "4************7"
#define ONENET_MASTER_APIKEY "V************************************="
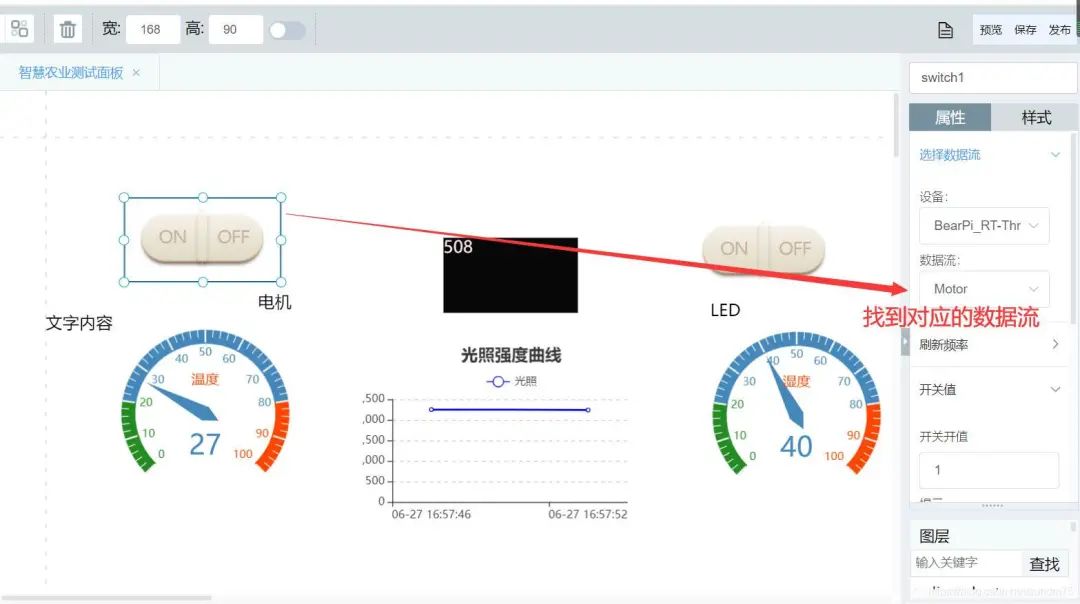
最后进行应用管理设置


本次测试过程从工程创建到系统完成,一共花费约2小时,RTT Studio属于高效、质量高的物联网构建方案
代码部分,自行添加的大型文件有: main.c 和 onenet_sample.c. 部分修改的代码有: bh17650.c 和 sht3x.c
其余均为参量等少量修改等,如wifi密码等
main.c源码:
/*
* Copyright (c) 2019-2021, BearPi IoT Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2021-04-17 BearPi IoT first version
*/
#include <rtthread.h>
#define DBG_TAG "main"
#define DBG_LVL DBG_LOG
#include <rtdbg.h>
#include <board.h>
#include <rtdevice.h>
#include "sensor.h"
#include "sht3x.h"
#include "dev_lcd.h"
#include "onenet.h"
extern int E53_IA1_sht30_demo(void);
extern int E53_IA1_bh1750_demo(void);
extern int onenet_mqtt_init(void); //初始化onenet
extern int onenet_upload_cycle(void); //循环上报温湿度数据
extern void onenet_upload_entry(void *parameter); //循环上报
extern int onenet_upload_cycle(void); //循环上报任务
extern int onenet_set_cmd_rsp(int argc, char **argv); //接收云端指令信息
extern int cloud_connect_flag;
extern sht3x_device_t dev_sht30;
extern struct rt_sensor_data bh1750_data;
int motor_status;
int led_pink_status;
int motor_flag = 0;
int led_flag = 0;
int send_flag1 = 0, send_flag2 = 0;
void key1_recall(void *args)
{
if (motor_status)
{
rt_pin_write(MOTOR_PIN, PIN_LOW);
motor_flag = 0;
}
else
{
rt_pin_write(MOTOR_PIN, PIN_HIGH);
motor_flag = 1;
}
rt_kprintf("KEY1 test!---\n");
motor_status = ~motor_status;
send_flag1 = 1;
}
void key2_recall(void *args)
{
if (led_pink_status)
{
rt_pin_write(LED1_PINK_PIN, PIN_LOW);
led_flag = 0;
}
else
{
rt_pin_write(LED1_PINK_PIN, PIN_HIGH);
led_flag = 1;
}
rt_kprintf("KEY2 test!+++\n");
led_pink_status = ~led_pink_status;
send_flag2 = 1;
}
int main(void)
{
int count = 1;
rt_pin_mode(LED0_PIN, PIN_MODE_OUTPUT); //输出模式
rt_pin_mode(LED1_PINK_PIN, PIN_MODE_OUTPUT); //输出模式
rt_pin_mode(MOTOR_PIN, PIN_MODE_OUTPUT); //输出模式
/*KEY1中断初始化*/
rt_pin_mode(KEY1_PIN, PIN_MODE_INPUT); //输入模式
rt_pin_attach_irq(KEY1_PIN, PIN_IRQ_MODE_FALLING, key1_recall, RT_NULL); //下降沿检测并调用回调函数
rt_pin_irq_enable(KEY1_PIN, PIN_IRQ_ENABLE); //使能中断
/*KEY2中断初始化*/
rt_pin_mode(KEY2_PIN, PIN_MODE_INPUT); //输入模式
rt_pin_attach_irq(KEY2_PIN, PIN_IRQ_MODE_FALLING, key2_recall, RT_NULL); //下降沿检测并调用回调函数
rt_pin_irq_enable(KEY2_PIN, PIN_IRQ_ENABLE); //使能中断
lcd_set_color(WHITE, BLUE); //背景白色,字体蓝色
onenet_mqtt_init(); //初始化onenet云平台
E53_IA1_sht30_demo(); //E53_IA1智慧农业扩展板温湿度传感器监测任务
E53_IA1_bh1750_demo(); //E53_IA1智慧农业扩展板光照强度传感器监测任务
onenet_set_cmd_rsp(RT_NULL, RT_NULL); //启动接收接收云平台指令并解析进行控制
onenet_upload_cycle(); //循环上报数据到云平台任务
while (count++)
{
lcd_show_string(180, 60, 32, "%2d% ", (int)dev_sht30->humidity); //湿度数据LCD显示
lcd_show_string(60, 60, 32, "%d.%d", (int)dev_sht30->temperature, (int)(dev_sht30->temperature * 10) % 10); //温度数据LCD显示
lcd_show_string(60, 125, 32, "%4d", bh1750_data.data.light / 10); //光照强度数据LCD显示
/*通过上传数据到云平台成功来判断是否上云成功*/
if (cloud_connect_flag == 1)
{
lcd_set_color(GREEN, BLUE);
lcd_show_string(140, 125, 32, "OneNET");
lcd_set_color(WHITE, BLUE);
}
else
{
lcd_set_color(RED, YELLOW);
lcd_show_string(140, 125, 32, "OneNET");
lcd_set_color(WHITE, BLUE);
}
/*E53_IA1 电机运行开关状态显示*/
if (motor_flag == 1)
{
lcd_set_color(BLUE, GREEN);
lcd_show_string(10, 210, 24, "FAN:ON ");
lcd_set_color(WHITE, BLUE);
}
else if (motor_flag == 0)
{
lcd_set_color(BLUE, RED);
lcd_show_string(10, 210, 24, "FAN:OFF ");
lcd_set_color(WHITE, BLUE);
}
/*E53_IA1 LED紫色灯开关状态显示*/
if (led_flag == 1)
{
lcd_set_color(BLUE, GREEN);
lcd_show_string(140, 210, 24, "LED:ON ");
lcd_set_color(WHITE, BLUE);
}
else if (led_flag == 0)
{
lcd_set_color(BLUE, RED);
lcd_show_string(140, 210, 24, "LED:OFF");
lcd_set_color(WHITE, BLUE);
}
if (send_flag1 == 1) //将本地按键控制状态上传到云平台来判定控制的设备:E53_IA1智慧农业扩展板电机
{
send_flag1 = 0;
if (onenet_mqtt_upload_digit("Motor_status", motor_flag))
{
LOG_E("upload has an error, stop uploading");
}
else
{
LOG_D("buffer : {\"Motor_status\":%d}", motor_flag);
}
}
if (send_flag2 == 1) //将本地按键控制状态上传到云平台来判定控制的设备:E53_IA1智慧农业扩展板LED紫色灯
{
send_flag2 = 0;
if (onenet_mqtt_upload_digit("LED_status", led_flag))
{
LOG_E("upload has an error, stop uploading");
}
else
{
LOG_D("buffer : {\"LED_status\":%d}", led_flag);
}
}
/*板载蓝灯闪烁*/
rt_pin_write(LED0_PIN, PIN_HIGH);
rt_thread_mdelay(500);
rt_pin_write(LED0_PIN, PIN_LOW);
rt_thread_mdelay(500);
}
return RT_EOK;
}
onenet_sample.c 源码
/*
* File : onenet_sample.c
* COPYRIGHT (C) 2006 - 2018, RT-Thread Development Team
*
* This program is free software; you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation; either version 2 of the License, or
* (at your option) any later version.
*
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License along
* with this program; if not, write to the Free Software Foundation, Inc.,
* 51 Franklin Street, Fifth Floor, Boston, MA 02110-1301 USA.
*
* Change Logs:
* Date Author Notes
* 2018-04-24 chenyong first version
*/
#include <stdlib.h>
#include <rtdevice.h>
#include <board.h>
#include <onenet.h>
#include <sensor.h>
#include <CJSON.h>
#define DBG_ENABLE
#define DBG_COLOR
#define DBG_SECTION_NAME "onenet.sample"
#if ONENET_DEBUG
#define DBG_LEVEL DBG_LOG
#else
#define DBG_LEVEL DBG_INFO
#endif /* ONENET_DEBUG */
#include <rtdbg.h>
#include <sht3x.h>
#ifdef FINSH_USING_MSH
#include <finsh.h>
extern sht3x_device_t dev_sht30;
extern struct rt_sensor_data bh1750_data;
extern int motor_flag;
extern int led_flag;
int cloud_connect_flag = 0;
void onenet_upload_entry(void *parameter)
{
int value1 = 0;
int value2 = 0;
int value3 = 0;
uint32_t count1 = 0;
uint32_t send_cnt = 0;
while (1)
{
value1 = dev_sht30->temperature;
value2 = dev_sht30->humidity;
value3 = bh1750_data.data.light;
switch (send_cnt++)
{
case 0:
if (onenet_mqtt_upload_digit("temperature", value1) < 0)
{
LOG_E("upload has an error, stop uploading");
cloud_connect_flag = 0;
}
else
{
LOG_D("buffer : {\"temperature\":%d}", value1);
cloud_connect_flag = 1;
}
break;
case 1:
if (onenet_mqtt_upload_digit("humidity", value2))
{
LOG_E("upload has an error, stop uploading");
}
else
{
LOG_D("buffer : {\"humidity\":%d}", value2);
}
break;
case 2:
if (onenet_mqtt_upload_digit("luminance", value3))
{
LOG_E("upload has an error, stop uploading");
}
else
{
LOG_D("buffer : {\"luminance\":%d}", value3);
}
break;
case 3:
if (count1++ >= 999999)
{
count1 = 0;
}
if (onenet_mqtt_upload_digit("Count", count1))
{
LOG_E("upload has an error, stop uploading");
}
else
{
LOG_D("buffer : {\"Count\":%d}", count1);
}
break;
}
if (send_cnt >= 4)
send_cnt = 0;
rt_thread_mdelay(rt_tick_from_millisecond(500));
}
}
int onenet_upload_cycle(void)
{
rt_thread_t tid;
tid = rt_thread_create("onenetupload", onenet_upload_entry, RT_NULL, 5 * 1024, 20, 6);
if (tid != RT_NULL)
{
rt_thread_startup(tid);
}
return 0;
}
MSH_CMD_EXPORT(onenet_upload_cycle, send data to OneNET cloud cycle);
int onenet_publish_digit(int argc, char **argv)
{
if (argc != 3)
{
LOG_E("onenet_publish [datastream_id] [value] - mqtt pulish digit data to OneNET.");
return -1;
}
if (onenet_mqtt_upload_digit(argv[1], atoi(argv[2])) < 0)
{
LOG_E("upload digit data has an error!\n");
}
return 0;
}
MSH_CMD_EXPORT_ALIAS(onenet_publish_digit, onenet_mqtt_publish_digit, send digit data to onenet cloud);
int onenet_publish_string(int argc, char **argv)
{
if (argc != 3)
{
LOG_E("onenet_publish [datastream_id] [string] - mqtt pulish string data to OneNET.");
return -1;
}
if (onenet_mqtt_upload_string(argv[1], argv[2]) < 0)
{
LOG_E("upload string has an error!\n");
}
return 0;
}
MSH_CMD_EXPORT_ALIAS(onenet_publish_string, onenet_mqtt_publish_string, send string data to onenet cloud);
/* onenet mqtt command response callback and analysis function */
static void onenet_cmd_rsp_cb(uint8_t *recv_data, size_t recv_size, uint8_t **resp_data, size_t *resp_size)
{
char res_buf[] = {"cmd is received!\n"};
cJSON *cjson_test = NULL;
cJSON *cjson_ctl = NULL;
LOG_D("recv data is %.*s\n", recv_size, recv_data);
char temp[] = {25};
/* user have to malloc memory for response data */
*resp_data = (uint8_t *)ONENET_MALLOC(strlen(res_buf));
strncpy((char *)*resp_data, res_buf, strlen(res_buf));
*resp_size = strlen(res_buf);
cjson_test = cJSON_Parse((char *)recv_data);
cjson_ctl = cJSON_GetObjectItem(cjson_test, "LED");
printf("OneNet Command %d\r\n", cjson_ctl->valueint);
if (cjson_ctl->valueint == 1)
{
rt_pin_write(LED1_PINK_PIN, PIN_HIGH);
led_flag = 1;
sprintf(temp, "LED?");
printf("OneNet Command LED ON\r\n");
if (onenet_mqtt_upload_digit("LED_status", led_flag))
{
LOG_E("upload has an error, stop uploading");
}
else
{
LOG_D("buffer : {\"LED_status\":ON}");
}
}
if (cjson_ctl->valueint == 0)
{
rt_pin_write(LED1_PINK_PIN, PIN_LOW);
led_flag = 0;
printf("OneNet Command LED OFF\r\n");
if (onenet_mqtt_upload_digit("LED_status", led_flag))
{
LOG_E("upload has an error, stop uploading");
}
else
{
LOG_D("buffer : {\"LED_status\":OFF}");
}
}
cjson_ctl = cJSON_GetObjectItem(cjson_test, "Motor");
printf("OneNet Command %d\r\n", cjson_ctl->valueint);
if (cjson_ctl->valueint == 1)
{
rt_pin_write(MOTOR_PIN, PIN_HIGH);
motor_flag = 1;
printf("OneNet Command Motor ON\r\n");
if (onenet_mqtt_upload_digit("Motor_status", motor_flag))
{
LOG_E("upload has an error, stop uploading");
}
else
{
LOG_D("buffer : {\"Motor_status\":ON}");
}
}
if (cjson_ctl->valueint == 0)
{
rt_pin_write(MOTOR_PIN, PIN_LOW);
motor_flag = 0;
printf("OneNet Command Motor OFF\r\n");
if (onenet_mqtt_upload_digit("Motor_status", motor_flag))
{
LOG_E("upload has an error, stop uploading");
}
else
{
LOG_D("buffer : {\"Motor_status\":OFF}");
}
}
}
/* set the onenet mqtt command response callback function */
int onenet_set_cmd_rsp(int argc, char **argv)
{
onenet_set_cmd_rsp_cb(onenet_cmd_rsp_cb);
return 0;
}
MSH_CMD_EXPORT(onenet_set_cmd_rsp, set cmd response function);
#endif /* FINSH_USING_MSH */
作者介绍:
孙冬梅:女,博士/博士后,副教授,2004年获南京理工大学测试计量技术及仪器专业博士学位;2011.1~2015.12进入南京工业大学“动力工程及工程热物理”博士后流动站从事研究工作。现任职于南京工业大学电控学院,兼任江苏省仪器仪表学会理事,江苏省射频识别技术标准化技术委员会委员。
文中所对应程序源码以及PPT,关注小熊派开源社区公众号,后台回复:210629 获取

你可以添加微信17775982065为好友,注明:公司+姓名,拉进 RT-Thread 官方微信交流群!

