
在新版的裁判系统中,增加了感光条对于车模通过进行检测与计时。相比与原来的电磁感应方式,它具有一定的优点:比如,检测灵敏度高,对于外界的电磁干扰具有很强的免疫能力。而且由于是PCB定制,形状固定,一致性好。但它对于环境光线急剧变化较为敏感,特别是周围活动的人影变化也会误触发计时系统,这一点它又不如电磁感应稳定。
因此在新版的竞赛系统中兼容了这两种传感器以便应用到各自适合的场合。
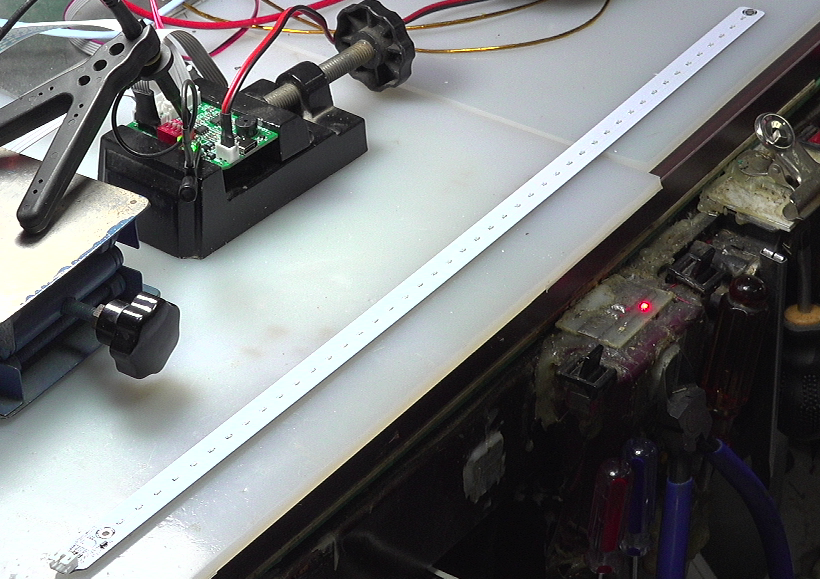
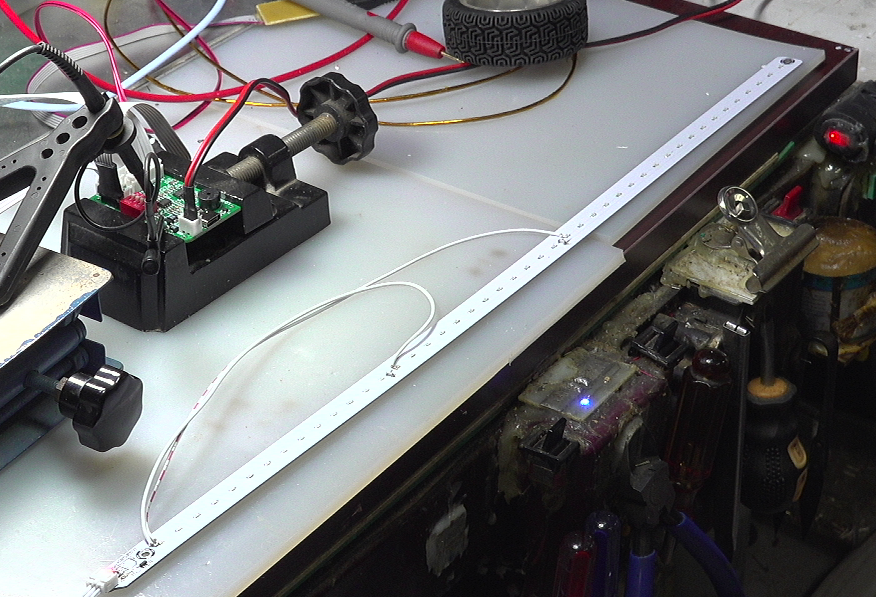
下图是一条焊接好的感光板,它应用了黄色LED对于光线比较敏感的特性来检测车模通过时所带来的光线变化。
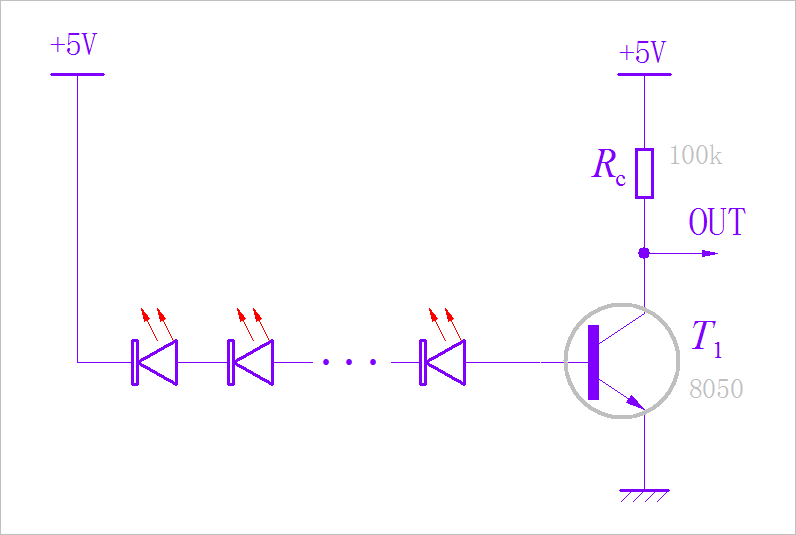
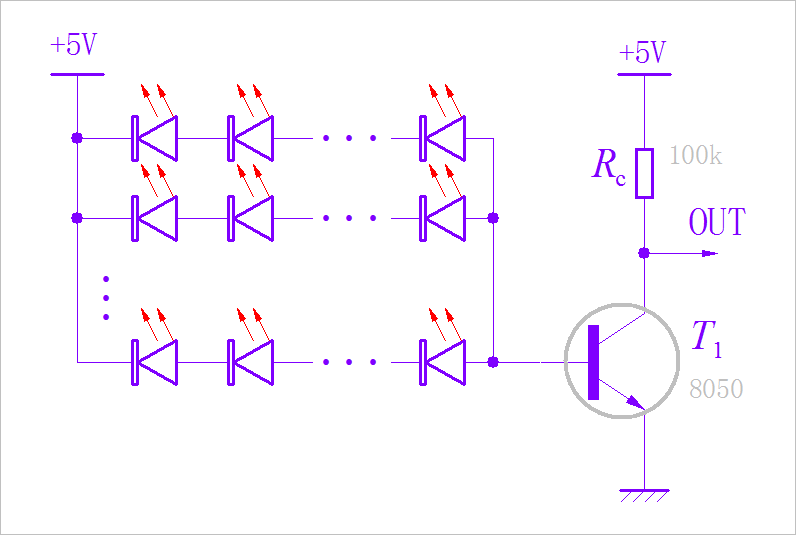
下面是上述感光板的电路图,将45个LED串联之后连接在电源与三极管的基极之间。在有光照的情况下,LED会有一定的反向电流流过。当任何一支LED被车模遮挡,它的反相电流就会降低,这个变化的电流经过三极管的放大之后,由Rc形成相应的变化电压送到裁判系统检测系统进行放大。
在实际的测试中,发现一个奇怪的现象。那就是感光板的不同位置的LED对于经过的车模检测灵敏度不同。越是靠近三极管的基极,灵敏度越高;远离三极管的基极则灵敏度降低。
这就奇怪了,这些LED串联在一起,任何一个所引起的电流变化对于三极管的基极电流影响都应该是相同的。为什么会有这样的区别呢?这个现象开始的时候让人百思不得其解。
下图显示了使用手在感光板上方快速通过,模拟车模经过时对于感光板的遮挡。
通过示波器观察三极管输出电压放大后的波形,对比在感光板不同位置所产生的电压变化情况。
下图显示了原理三极管基极的LED被遮挡所产生的电压变化,会看到电压有比较缓慢的上升沿和下降沿。

下图显示了靠近三极管基极LED被遮挡时,电流变化波形,可以看到它对应的波形变化则是非常迅速。

正是由于感光板不同位置LED被遮挡所引起三极管电流波形变化速度不同,就会使得检测灵敏度有很大差别。靠近三极管基极的LED引起电流变化速度快,则灵敏度高;原理三极管基极的LED引起电流变化速度慢,则灵敏度降低。特别是对于快速通过的车模,如果速度很快,缓慢变化的电流就有可能无法响应。
那么问题来了,为什么不同位置的LED所引起电流变化的速度不同呢?
这就需要考虑到电路中的分布的寄生电容所带来的影响了。在感光板的背面,铺设有地线层,它可有效的降低周围电磁场对于电路板的影响。但这层地线也给电路带来了很多寄生电容。如下图中红色电路所显示的寄生电容,是每个LED以及相关的引线与背面的底层之间的电容。
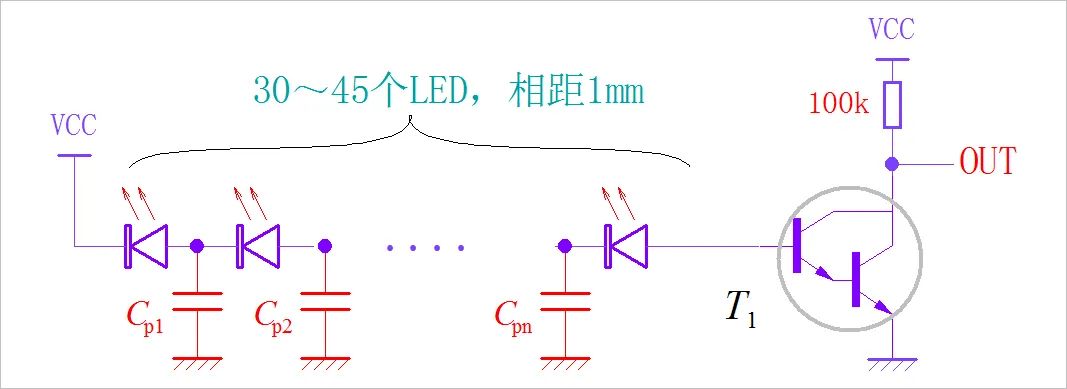
通过上图可以明显的看出,不同位置上的LED所引起的电流变化信号,达到三极管基极的电路不同。远离三极管基极LED所引起的电流变化信号需要通过很多级的寄生电容的低通滤波才能够达到三极管的基极,因此引起输出放大信号就会比较缓慢。反之,靠近三极管基极的LED所引起的变化电流信号引起三极管的放大信号就非常快。
问题到此为止,应该是找到了原因。那么怎么来验证这个解释?如何改进电路呢?
一种简单的方法就是把原来的单条LED串联支路改成拆解成若干并联的支路,这样可以有效缩短每个LED所产生的电流变化到三极管基极的距离,进而可以提高整个电路相应速度。如下图所示。
当然,这种并联也会带来一定的代价,那就是其中任何一个支路所产生的电流变化信号除了会影响三极管基极电流之外,也会由于其它电路的分流而减少,从而降低整个输出信号的幅度。所以将LED串联分解成若干支路的数量也不能够太多。
下面是通过飞线将原来的单个LED串联支路拆成三个并联支路。测试一下感光电路板的性能。
通过实际测试,可以看到这三段LED检测输出信号的速度都基本一致了,而且不同部分的LED之间差异变得更小,整个感光板的灵敏度都得到了提高。
有的时候,这些看不到寄生电容所带来的麻烦实际上更加的诡秘。吃一堑,长一智,碰到的问题越多,经验也就越丰富。
