

大家好,我是痞子衡,是正经搞技术的痞子。今天痞子衡给大家分享的是嵌入式里串口(UART)自动波特率识别程序设计与实现。
串口(UART)是嵌入式里最基础最常用也最简单的一种通讯(数据传输)方式,可以说是工程师入门通讯领域的启蒙老师,同时串口打印也是嵌入式项目里非常经典的调试与交互方式。
最精简的串口仅使用两根单向信号线:TXD、RXD,这两根信号线是独立工作的,因此数据收发既可分开也可同时进行,这就是所谓的全双工。串口没有主从机概念,并且没有专门的时钟信号 SCK,所以串口通信也属于异步传输。
说到异步传输,这就不得不提波特率(每秒钟传输bit数)的问题了,通信双方必须使用一致的波特率才能完成正确的数据传输。正常情况下,我们都是为两个串口设备事先约定好波特率,比如 MCU 与上位机通信,在 MCU 程序里按 115200 的波特率去初始化 UART 外设,然后上位机串口调试助手也设置 115200 波特率,双方再联合工作。
有时候,我们也希望能有一种灵活的波特率约定方式,比如建立通信前,在上位机串口调试助手里随意设置一种波特率,然后按这个波特率发送数据,MCU 端能自动识别出这个波特率,并用识别出来的波特率去初始化 UART 外设,然后再进行后续数据传输,这种方式就叫自动波特率识别。痞子衡今天要分享的就是在 MCU 里实现自动波特率识别的程序设计:
程序主页:https://github.com/JayHeng/cortex-m-apps/tree/master/components/autobaud
首先是设计自动波特率识别程序头文件:autobaud.h ,这个头文件里直接定义如下 3 个接口函数原型。涵盖必备的初始化流程 init()、deinit(),以及最核心的波特率识别功能 get_rate()。
//! @brief 初始化波特率识别
void autobaud_init(void);
//! @brief 检测波特率识别是否已完成,并获取波特率值
bool autobaud_get_rate(uint32_t *rate);
//! @brief 关闭波特率识别
void autobaud_deinit(void);
关于识别,因为上位机数据是从 RXD 引脚过来的,所以在 MCU 里需要先将 RXD 引脚配置成普通数字输入 GPIO(这个引脚需要上拉,默认保持高电平),然后检测这个 GPIO 的电平跳变(一般用下降沿)并计时。
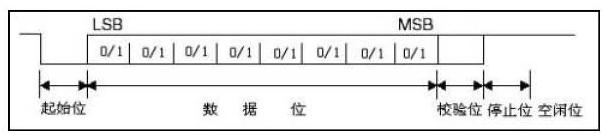
下图是典型的 UART 单字节传输时序,I/O 空闲状态是高电平,传输时总是由 1bit 低电平起始位开启,然后是从 LSB 到 MSB 的 8bit 数据位,校验位是可选项(我们暂不开启),最后由 1bit 高电平停止位结束,I/O 回归高电平空闲状态。
Note 1:检测下降沿跳变,是因为 I/O 空闲为高,起始位的存在保证了每 Byte 传输周期总是从下降沿开始。 Note 2:起始位和停止位两个 bit 的存在还兼有波特率容错的功能,通信双方波特率在 3% 的误差内数据传输均可以正常进行。
虽然我们不需要约定上位机波特率,但是要想实现波特率自动识别,上位机初始传输的数据却必须要事先约定好(可理解为接头暗号),这涉及到 MCU 里检测电平跳变次数与相应计时计算。MCU识别完成后将暗号发回给上位机确认。
痞子衡设计的接头暗号是 0x5A, 0xA6 两个字节,两字节暗号相比单字节暗号容错性更好一些(以防 I/O 上有干扰,导致误识别),根据指定的暗号和 UART 传输时序图,我们很容易得到如下常量定义:
enum _autobaud_counts
{
//! 0x5A 字节对应的下降沿个数
kFirstByteRequiredFallingEdges = 4,
//! 0xA6 字节对应的下降沿个数
kSecondByteRequiredFallingEdges = 3,
//! 0x5A 字节(从起始位到停止位)第一个下降沿到最后一个下降沿之间的实际bit数
kNumberOfBitsForFirstByteMeasured = 8,
//! 0xA6 字节(从起始位到停止位)第一个下降沿到最后一个下降沿之间的实际bit数
kNumberOfBitsForSecondByteMeasured = 7,
//! 两个下降沿之间允许的最大超时(us)
kMaximumTimeBetweenFallingEdges = 80000,
//! 对实际检测出的波特率值做对齐处理,以便于更好地配置UART模块
kAutobaudStepSize = 1200
};
上述常量定义里,kMaximumTimeBetweenFallingEdges 指定了两个下降沿之间允许的最大时间间隔,超过这个时间,自动波特率程序将丢掉前面统计的下降沿个数,重头开始识别,这个设计也是为了防止 I/O 上有电平干扰,导致误识别。
kAutobaudStepSize 常量是为了对检测出的波特率值做对齐处理,公式是 rounded = stepSize * (value/stepSize + 0.5),其中 value 是实际检测出的波特率值,rounded 是对齐后的波特率值,用对齐后的波特率值能更好地配置UART外设(这跟UART模块里波特率发生器SBR设计有关)。
最后就是 I/O 电平下降沿检测方法设计,这里既可以用软件查询(就是循环读取 I/O 输入电平,比较当前值与上一次值的差异),也可以使用GPIO模块自带的边沿中断功能。推荐使用后者,一方面计时更精确,另外也不用阻塞系统。检测到下降沿发生就调用一次如下 pin_transition_callback() 函数,在这个函数里统计跳变次数以及计时。
//! @brief 管脚下降沿跳变回调函数
static void pin_transition_callback(void);
根据上一小节描述的设计思想,我们很容易写出下面的主代码(autobaud_irq.c),代码里痞子衡都做了详细注释。有一点要提的是关于其中系统计时,可参考痞子衡旧文 《嵌入式里通用微秒(microseconds)计时函数框架设计与实现》 。
//! @brief 使能GPIO管脚中断
extern void enable_autobaud_pin_irq(pin_irq_callback_t func);
//! @brief 关闭GPIO管脚中断
extern void disable_autobaud_pin_irq(void);
//!< 已检测到的下降沿个数
static uint32_t s_transitionCount;
//!< 0x5A 字节检测期间内对应计数值
static uint64_t s_firstByteTotalTicks;
//!< 0xA6 字节检测期间内对应计数值
static uint64_t s_secondByteTotalTicks;
//!< 上一次下降沿发生时系统计数值
static uint64_t s_lastToggleTicks;
//!< 下降沿之间最大超时对应计数值
static uint64_t s_ticksBetweenFailure;
void autobaud_init(void)
{
s_transitionCount = 0;
s_firstByteTotalTicks = 0;
s_secondByteTotalTicks = 0;
s_lastToggleTicks = 0;
// 计算出下降沿之间最大超时对应计数值
s_ticksBetweenFailure = microseconds_convert_to_ticks(kMaximumTimeBetweenFallingEdges);
// 使能GPIO管脚中断,并注册中断处理回调函数
enable_autobaud_pin_irq(pin_transition_callback);
}
void autobaud_deinit(void)
{
// 关闭GPIO管脚中断
disable_autobaud_pin_irq();
}
bool autobaud_get_rate(uint32_t *rate)
{
if (s_transitionCount == (kFirstByteRequiredFallingEdges + kSecondByteRequiredFallingEdges))
{
// 计算出实际检测到的波特率值
uint32_t calculatedBaud =
(microseconds_get_clock() * (kNumberOfBitsForFirstByteMeasured + kNumberOfBitsForSecondByteMeasured)) /
(uint32_t)(s_firstByteTotalTicks + s_secondByteTotalTicks);
// 对实际检测出的波特率值做对齐处理
// 公式:rounded = stepSize * (value/stepSize + .5)
*rate = ((((calculatedBaud * 10) / kAutobaudStepSize) + 5) / 10) * kAutobaudStepSize;
return true;
}
else
{
return false;
}
}
void pin_transition_callback(void)
{
// 获取当前系统计数值
uint64_t ticks = microseconds_get_ticks();
// 计数这次检测到的下降沿
s_transitionCount++;
// 如果本次下降沿与上次下降沿之间间隔过长,则从头开始检测
uint64_t delta = ticks - s_lastToggleTicks;
if (delta > s_ticksBetweenFailure)
{
s_transitionCount = 1;
}
switch (s_transitionCount)
{
case 1:
// 0x5A 字节检测时间起点
s_firstByteTotalTicks = ticks;
break;
case kFirstByteRequiredFallingEdges:
// 得到 0x5A 字节检测期间内对应计数值
s_firstByteTotalTicks = ticks - s_firstByteTotalTicks;
break;
case (kFirstByteRequiredFallingEdges + 1):
// 0xA6 字节检测时间起点
s_secondByteTotalTicks = ticks;
break;
case (kFirstByteRequiredFallingEdges + kSecondByteRequiredFallingEdges):
// 得到 0xA6 字节检测期间内对应计数值
s_secondByteTotalTicks = ticks - s_secondByteTotalTicks;
// 关闭GPIO管脚中断
disable_autobaud_pin_irq();
break;
}
// 记录本次下降沿发生时系统计数值
s_lastToggleTicks = ticks;
}
前面讲的都是硬件无关设计,但最终还是要落实到具体 MCU 平台上的,其中 GPIO 中断部分是跟 MCU 紧相关的。我们以恩智浦 i.MXRT1011 为例来介绍硬件实现。
恩智浦 MIMXRT1010-EVK 有板载调试器 DAPLink,这个 DAPLink 中也集成了 USB 转串口的功能,对应的 UART 引脚是 IOMUXC_GPIO_09_LPUART1_RXD 和 IOMUXC_GPIO_10_LPUART1_TXD,我们就选用这个管脚 GPIO1[9] 做自动波特率检测,实现代码如下:
BSP程序:https://github.com/JayHeng/cortex-m-apps/tree/master/apps/autobaud_imxrt1011/bsp/src/pinmux_utility.c
typedef void (*pin_irq_callback_t)(void);
static pin_irq_callback_t s_pin_irq_func;
//! @brief UART引脚功能切换函数
void uart_pinmux_config(bool setGpio)
{
if (setGpio)
{
IOMUXC_SetUartAutoBaudPinMode(IOMUXC_GPIO_09_GPIOMUX_IO09, GPIO1, 9);
}
else
{
IOMUXC_SetUartPinMode(IOMUXC_GPIO_09_LPUART1_RXD);
IOMUXC_SetUartPinMode(IOMUXC_GPIO_10_LPUART1_TXD);
}
}
//! @brief 使能GPIO管脚中断
void enable_autobaud_pin_irq(pin_irq_callback_t func)
{
s_pin_irq_func = func;
// 开启GPIO1_9下降沿中断
GPIO_SetPinInterruptConfig(GPIO1, 9, kGPIO_IntFallingEdge);
GPIO1->IMR |= (1U << 9);
NVIC_SetPriority(GPIO1_Combined_0_15_IRQn, 1);
NVIC_EnableIRQ(GPIO1_Combined_0_15_IRQn);
}
//! @brief GPIO中断处理函数
void GPIO1_Combined_0_15_IRQHandler(void)
{
uint32_t interrupt_flag = (1U << 9);
// 仅当GPIO1_9中断发生时
if ((GPIO_GetPinsInterruptFlags(GPIO1) & interrupt_flag) && s_pin_irq_func)
{
//执行一次回调函数
s_pin_irq_func();
GPIO_ClearPinsInterruptFlags(GPIO1, interrupt_flag);
}
}
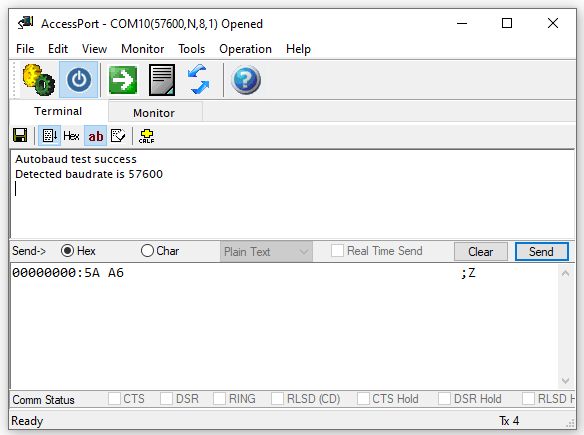
一切就绪,我们现在来实测一下,主函数流程很简单,测试结果也表明达到了预期效果,每次将 MCU 程序复位运行后,串口调试助手里可任意设置波特率。
int main(void)
{
// 略去系统时钟配置...
// 初始化定时器
microseconds_init();
// 将GPIO1_9先配成输入GPIO
bool setGpio = true;
uart_pinmux_config(setGpio);
// 初始化波特率识别
autobaud_init();
// 检测波特率识别是否已完成,并获取波特率值
uint32_t baudrate;
while (!autobaud_get_rate(&baudrate));
// 关闭波特率识别
autobaud_deinit();
// 配置UART1引脚
setGpio = false;
uart_pinmux_config(setGpio);
// 初始化UART1外设
uint32_t uartClkSrcFreq = BOARD_DebugConsoleSrcFreq();
DbgConsole_Init(1, baudrate, kSerialPort_Uart, uartClkSrcFreq);
PRINTF("Autobaud test success\r\n");
PRINTF("Detected baudrate is %d\r\n", baudrate);
while (1);
}
至此,嵌入式里串口(UART)自动波特率识别程序设计与实现痞子衡便介绍完毕了,掌声在哪里~~~

1.报名啦!构建安全的嵌入式系统--从FreeRTOS到SAFERTOS线上课程
2.2021年第6期《单片机与嵌入式系统应用》电子刊新鲜出炉!
3.华为官方通知:鸿蒙不再属于华为!
4.妙用MCU中SystemReset不复位的通用寄存器!
5.单片机就那点资源,为啥那么多人想用RTOS?
6.儿童节之际回忆痴迷技术的大学时光!
免责声明:本文系网络转载,版权归原作者所有。如涉及作品版权问题,请与我们联系,我们将根据您提供的版权证明材料确认版权并支付稿酬或者删除内容。
