对于线程的栈空间,相信各位小伙伴都不陌生。它有下面的这几项特性:
由操作系统分配固定的空间;
使用一个栈寄存器来保存实时位置;
后进先出。

今天,我们不聊操作系统层面对栈的管理,只从应用程序的角度,来看一下如何实时获取栈的使用情况。
在一般的单片机/嵌入式程序开发过程中,在创建一个线程(或者称作任务)的时候,是可以指定给该线程分配多少栈空间的。
然后在调试的时候呢,周期性的打印出栈区的使用情况:消耗了多少空间,还剩余多少空间。
这样的话,跑完每一个测试用例之后,就能得到一个大致的统计数据,从而最终决定:需要给这个线程分配多少栈空间。
例如:在 ucOS 系统中,提供了函数 NT8U OSTaskStkChk(INT8U prio, OS_STK_DATA *p_stk_data),来获取一个任务的栈使用信息。
但是在 Linux 系统中,并没有这样类似的函数,来直接获取栈使用信息。
因此,为了得到此线程的已使用和空闲栈空间,必须通过其他的方式来获取。
下面,就提供 2 种解决方案:正规军方式和杂牌军方式!

在 Linux 系统中,在创建一个线程的时候,是可以通过线程属性来设置:为这个线程分配多少的栈(stack)空间的。
如果应用程序不指定的话,操作系统就设置为一个默认的值。
线程创建完毕之后,操作系统在内核空间,记录了这个线程的一切信息,当然也就包括给它分配的栈空间信息。
为了让应用层能够获取到这个信息,操作系统也提供了相应的系统函数。代码如下:
pthread_attr_t attr;
void *stack_addr;
int stack_size;
memset(&attr, 0, sizeof(pthread_attr_t));
pthread_getattr_np(pthread_self(), &attr);
pthread_attr_getstack(&attr, &stack_addr, &stack_size);
pthread_attr_destroy(&attr);
printf("statck top = %p \n", stack_addr);
printf("stack bottom = %p \n", stack_addr + stack_size);
从上面这段代码中可以看到,它只能获取栈空间的地址开始以及总的空间大小,仍然不知道当前栈空间的实际使用情况!
我找了一下相关的系统调用,Linux 似乎没有提供相关的函数。
怎么办?只能迂回操作。

我们知道,在 Linux x86 平台上,寄存器 ESP 就是来存储栈指针的。对于一个满递减类型的栈,这个寄存器里的值,就代表了当前栈中最后背使用的、那个栈空间的地址。
因此,只要我们能够获取到 ESP 寄存器里的值,就相当于知道了当前这个栈有多少空间被使用了。
那么怎样来获取 ESP 寄存器的值呢?既然是寄存器,那就肯定是使用汇编代码了。
很简单,就 1 行:
size_t esp_val;
asm("movl %%esp, %0" : "=m"(esp_val) :);
对不起,我错了!应该是 2 行代码,忘记变量定义了。
对于汇编代码不熟悉的小伙伴,可以参考之前总结的一篇文章:内联汇编很可怕吗?看完这篇文章,终结它!
找到第 4 个示例,直接抄过来就行。
好了,拿到了以上的所有信息,就可以计算出栈的已使用和空闲空间的大小了:

把以上代码放在一起:
#include <unistd.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <pthread.h>
#include <sys/resource.h>
void print_stack1()
{
size_t used, avail;
pthread_attr_t attr;
void *stack_addr;
int stack_size;
// 获取栈寄存器 ESP 的当前值
size_t esp_val;
asm("movl %%esp, %0" : "=m"(esp_val) :);
// 通过线程属性,获取栈区的起始地址和空间总大小
memset(&attr, 0, sizeof(pthread_attr_t));
pthread_getattr_np(pthread_self(), &attr);
pthread_attr_getstack(&attr, &stack_addr, &stack_size);
pthread_attr_destroy(&attr);
printf("espVal = %p \n", esp_val);
printf("statck top = %p \n", stack_addr);
printf("stack bottom = %p \n", stack_addr + stack_size);
avail = esp_val - (size_t)stack_addr;
used = stack_size - avail;
printf("print_stack1: used = %d, avail = %d, total = %d \n",
used, avail, stack_size);
}
int main(int argc, char *agv[])
{
print_stack1();
return 0;
}

上面的正规军方法,主要是通过系统函数获取了线程的属性信息,从而获取了栈区的开始地址和栈的总空间大小。
为了获取这两个值,调用了 3 个函数,有点笨重!
不知各位小伙伴是否想起:Linux 操作系统会为一个应用程序,都提供了一些关于 limit 的信息,这其中就包括堆栈的相关信息。

这样的话,我们就能拿到一个线程的栈空间总大小了。
此时,还剩下最后一个变量不知道:栈区的开始地址!
我们来分析一下哈:当一个线程刚刚开始执行的时候,栈区里可以认为是空的,也就是说此时 ESP 寄存器里的值就可以认为是指向栈区的开始地址!
是不是有豁然开朗的感觉?!

但是,这仍然需要调用汇编代码来获取。
再想一步,既然此时栈区里可以认为是空的,那么如果在线程的第一个函数中,定义一个局部变量,然后通过获取这个局部变量的地址,不就相当于是获取到了栈区的开始地址了吗?
如下图所示:
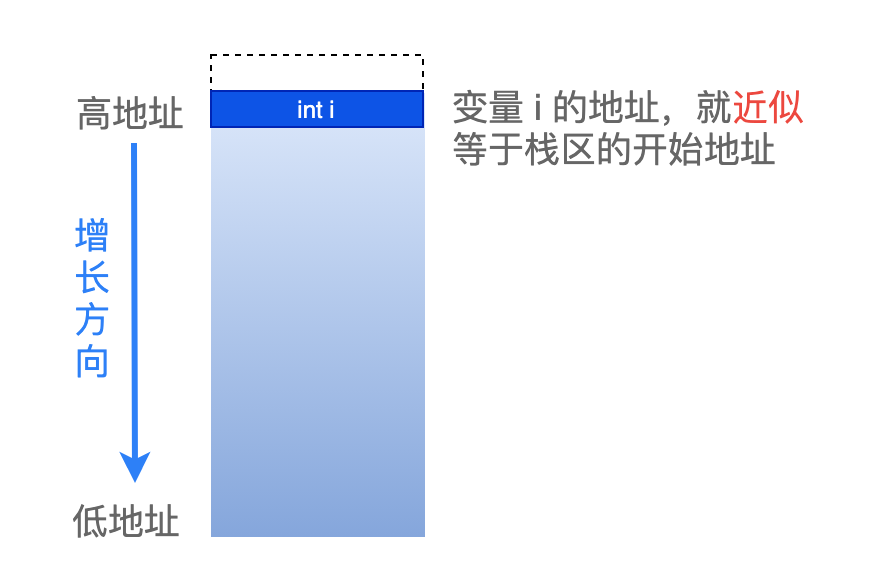
我们可以把这个局部变量的地址,记录在一个全局变量中。然后在应用程序的其他代码处,就可以用它来代表栈的起始地址。
知道了 3 个必需的变量,就可以计算栈空间的使用情况了:
// 用来存储栈区的起始地址
size_t top_stack;
void print_stack2()
{
size_t used, avail;
size_t esp_val;
asm("movl %%esp, %0" : "=m"(esp_val) :);
printf("esp_val = %p \n", esp_val);
used = top_stack - esp_val;
struct rlimit limit;
getrlimit(RLIMIT_STACK, &limit);
avail = limit.rlim_cur - used;
printf("print_stack2: used = %d, avail = %d, total = %d \n",
used, avail, used + avail);
}
int main(int argc, char *agv[])
{
int x = 0;
// 记录栈区的起始地址(近似值)
top_stack = (size_t)&x;
print_stack2();
return 0;
}
在上面的两种方法中,获取栈的当前指针位置的方式,都是通过汇编代码,来获取寄存器 ESP 中的值。
是否可以继续利用刚才的技巧:通过定义一个局部变量的方式,来间接地获取 ESP 寄存器的值?

void print_stack3()
{
int x = 0;
size_t used, avail;
// 局部变量的地址,可以近似认为是 ESP 寄存器的值
size_t tmp = (size_t)&x;
used = top_stack - tmp;
struct rlimit limit;
getrlimit(RLIMIT_STACK, &limit);
avail = limit.rlim_cur - used;
printf("print_stack3: used = %d, avail = %d, total = %d \n",
used, avail, used + avail);
}
int main(int argc, char *agv[])
{
int x = 0;
top_stack = (size_t)&x;
print_stack3();
return 0;
}
以上的几种方式,各有优缺点。
我们把以上 3 个打印堆栈使用情况的函数放在一起,然后在 main 函数中,按顺序调用 3 个测试函数,每个函数中都定义一个整型数组(消耗 4K 的栈空间),然后看一下这几种方式的打印输出信息:
// 测试代码(3个打印函数就不贴出来了)
void print_stack1()
{
...
}
void print_stack2()
{
...
}
void print_stack3()
{
...
}
void func3()
{
int num[1024];
print_stack1();
printf("\n\n ********* \n");
print_stack2();
printf("\n\n ********* \n");
print_stack3();
}
void func2()
{
int num[1024];
func3();
}
void func1()
{
int num[1024];
func2();
}
int main(int argc, char *agv[])
{
int x = 0;
top_stack = (size_t)&x;
func1();
return 0;
}
打印输出信息:
espVal = 0xffe8c980
statck top = 0xff693000
stack bottom = 0xffe90000
print_stack1: used = 13952, avail = 8362368, total = 8376320
*********
esp_val = 0xffe8c9a0
print_stack2: used = 12456, avail = 8376152, total = 8388608
*********
print_stack3: used = 12452, avail = 8376156, total = 8388608让知识流动起来,越分享越幸运!
本文转载自道哥公众号IOT物联网小镇:
Hi~,我是道哥,嵌入式开发老兵。
星标公众号,能更快找到我!
更多精彩,尽在"Linux阅码场",扫描下方二维码关注

