

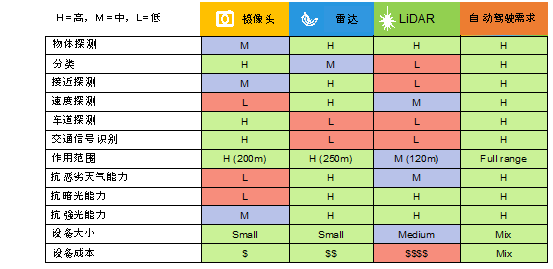
摄像头和人眼工作最相似,在物体识别和分类上表现最好,采用多目摄像头还可以增加“深度”感知的能力,但是其对于外界天气、光线等环境因素影响比较敏感;
毫米波雷达在测速(特别是远距离)方面表现最佳,且不易受环境因素影响,但是在静态物体检测、3D空间建模、物体和交通信号识别等方面较弱;
激光雷达(LiDAR)通过向探测区域发射和接收激光信号,可以构建起3D空间模型,在高精度静态物体检测方面无出其右者。
视觉信号的处理对于算力的消耗非常大,为此特斯拉开发了自己专用的自动驾驶计算平台。
在数据方面,特斯拉会采集用户实际驾驶中的数据,用“影子模式”去学习用户的驾驶逻辑,认识各种各样的驾驶场景,确保有充足的数据去做系统的优化。
使用的用户越多,收集的数据也越多,基于数据不断优化的算法也会越智能。
往期相关文章回顾:
长按识别二维码关注安富利
获取更多精彩内容



