



引 言
水下滑翔机(underwater glider)是一种典型的自治水下航行器,主要采用浮力驱动实现其在海洋中的上升或下潜,其工作原理如图 1 所示。在下潜起始阶段,通过浮力驱动单元减小自身排水体积,使重力大于浮力,开始下潜;到达设定深度后,在浮力驱动单元作用下,改变自身排水体积,使其所受浮力大于重力,从而实现下潜到上浮的转变。在下潜和上浮过程中,借助固定水平翼上的水动力产生水平运动,从而实现在纵平面内锯齿形滑翔运动。
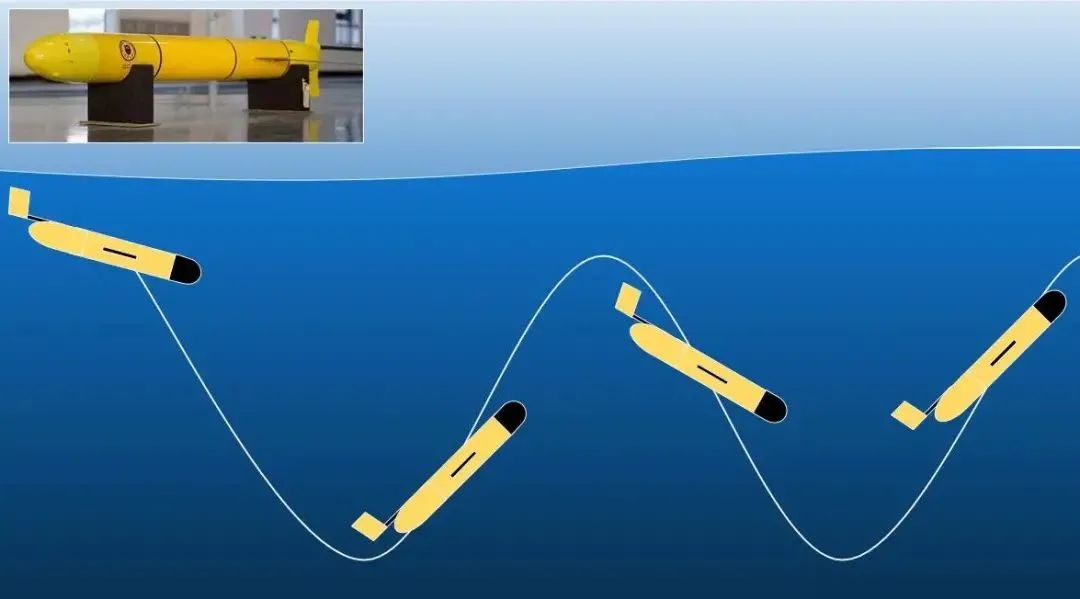
在滑翔过程中,通过调整内部偏心重物沿滑翔机主轴线前后移动或左右转动,实现滑翔机自身姿态的控制。水下滑翔机在实际工作过程中,会定期浮出水面,通过固定于尾部的天线进行定位与通信,实现数据传输与指令控制。在水下运动过程中,使用内部集成的电子罗盘和压力传感器,结合水面卫星定位信息,通过航位推算算法实现在水下的粗定位与导航。水下滑翔机作为小型的移动观测平台,具有低能耗、运行成本低等特点,能够满足长时序、大范围的海洋三维观探测需求,已广泛应用于海洋现场观测、科学研究、环境保护、国防安全等领域,在全球海洋观测与探测系统中发挥着重要作用。相比于传统的走航式和定点潜标式观测手段,水下滑翔机具有灵活机动、高效和低成本的优点,可摆脱对投放母船的依赖,大幅度降低海洋观测及水下探测成本。
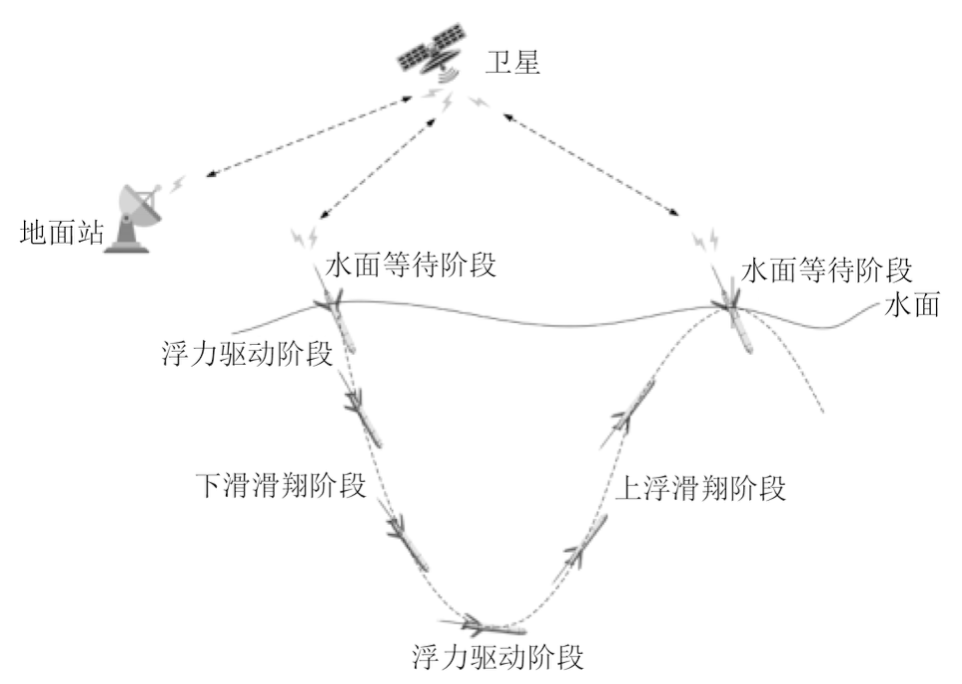
图1 水下滑翔机工作原理示意图
发展历程
1.1
国外发展历程
水下滑翔机设计概念与应用规划最早由美国海洋学家 Henry Stommel 于 1989 年提出[5]。1991 年,世界首台水下滑翔机 Slocum 在美国海军研究办公室(Officeof Naval Research,ONR)的资助下由伍兹霍尔海洋研究所(Woods Hole Oceanographic Institution,WHOI)成功研制,并先后在美国佛罗里达州和纽约州成功完成相关功能验证试验。1999 年,美国华盛顿大学应用物理实验室(Applied Physics Laboratory,APL)研制成功Seaglider 水下滑翔机。同年,美国斯克利普斯研究所(Scripps Institution of Oceanography,SIO)和 WHOI 共同研制成功 Spray 水下滑翔机。
经过十几年的发展,3 型水下滑翔机逐渐应用于大中尺度海洋现场调查中,并显示出在海洋观测中的巨大潜力,于 2002 年首次开始商业化产品销售应用。在随后几年时间内,Slocum,Seaglider,Spray 三型水下滑翔机通过技术转让分别通过 Teledyne Technologies,Kongsberg Maritime,Bluefin Robotics 公司开始市场化运作,成为当前国际上主流的水下滑翔机产品,并逐渐应用于全球各地的海洋观探测任务中。
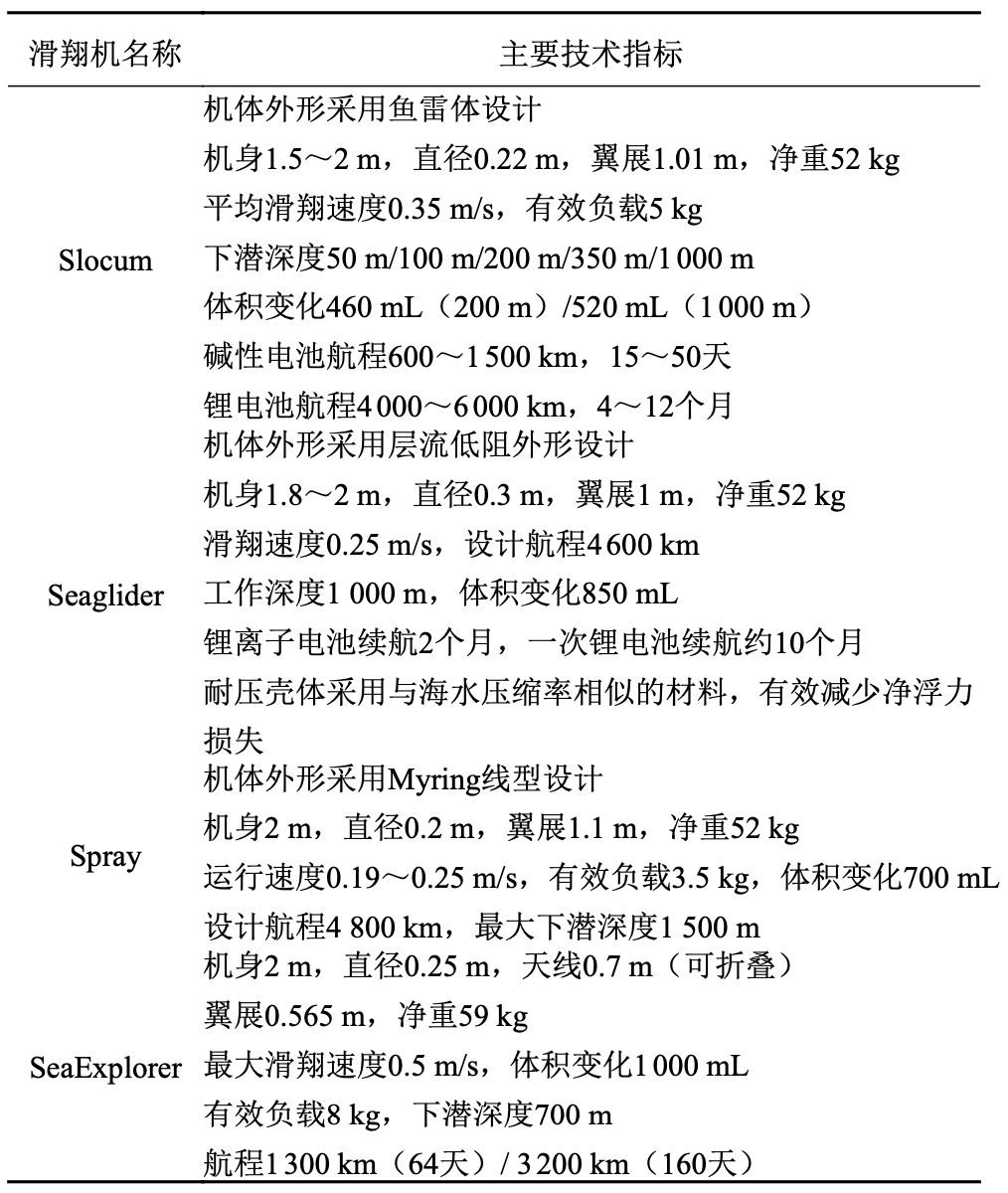
此外,法国 ACSA 公司在 2009 年研制成功 SeaEx-plorer 水下滑翔机,成为国外除美国外唯一实现商业化运行的水下滑翔机产品。各型水下滑翔机如图 2 所示,主要性能参数如表 1 所示。
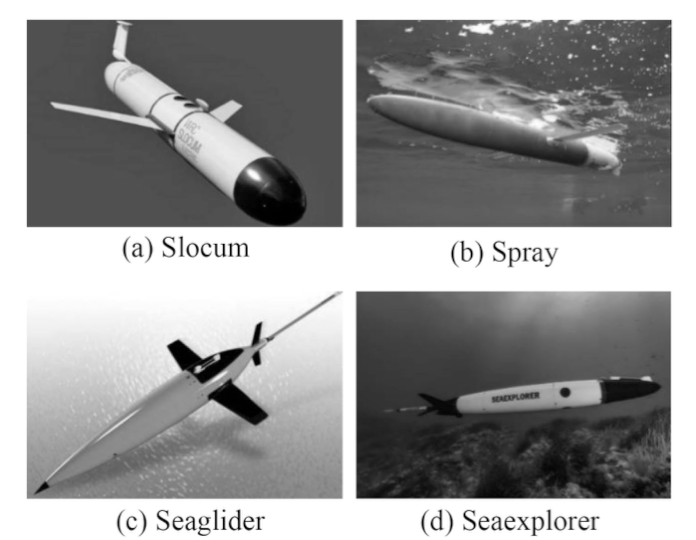
图2 国外商业化水下滑翔机产品
表 1 国外商业化水下滑翔机技术参数
1.2
我国发展历程
我国的水下滑翔机研发工作起步于 21 世纪初,天津大学研究团队最早于 2002 年开始首型水下滑翔机的探索研制,之后在多项科研项目的大力支持下进入高速发展时期。2012 年,天津大学、中科院沈阳自动化研究所、华中科技大学、中国海洋大学共同承担863 计划项目“深海滑翔机研制及海上试验研究”,开展了多型水下滑翔机工程样机的研制工作,加速推进了深海滑翔机技术工程化。
2015 年,在科技部组织的成果验收试验中,14 台水下滑翔机参加了南海滑翔机性能综合测试。天津大学“海燕-II”滑翔机连续无故障航行 42 天,覆盖超过1 100 km 的水域,最大下潜深度达到 1 500 m,创造了我国滑翔机当时的纪录。2017 年,中国科学院沈阳自动化研究所“海翼−7 000”深海滑翔机在马里亚纳海沟挑战者深渊完成了大深度下潜观测任务并安全回收,其最大下潜深度达到 6 329 m,刷新了水下滑翔机最大下潜深度 6 003 m 的世界纪录。2018 年,天津大学“海燕−10 000”万米级水下滑翔机在马里亚纳海沟附近海域完成一系列观测任务并安全回收,最大工作深度达到8213 m,创造了下潜深度最新世界纪录。
此外,浙江大学、上海交通大学、西北工业大学和华中科技大学等单位也积极开展了水下滑翔机相关研究工作。通过近 20 年的努力,我国水下滑翔机单机关键技术已较为成熟,我国研制的多型水下滑翔机已经达到工程化和实用化要求。
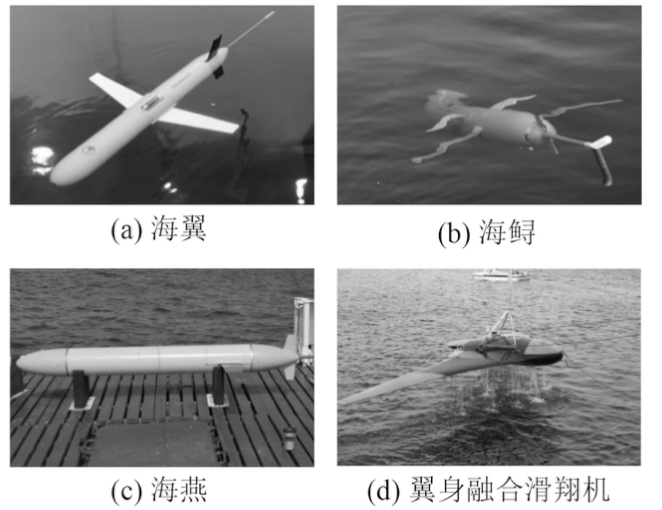
图3 我国研制的水下滑翔机产品
水下滑翔机集群组网应用现状
与单台水下滑翔机相比,多台滑翔机组成的集群编队可形成如下优势:增强水下滑翔机观探测覆盖范围和观探测能力;实现由点到区域空间的立体观测;可同时获取海洋中多点位信息,实现分布式信息感知;通过携带不同种类任务载荷,实现多尺度、多任务并行探测;提升了区域覆盖冗余度,增强组网方案的鲁棒性和自适应性。随着水下滑翔机单机技术发展日益成熟,具有效费比高、易于布放回收、操控便捷、通用性强等优势特点为水下滑翔机应用范围逐渐扩大,在各类海洋观探测网络的应用愈加广泛,并逐步应用于集群水下目标探测方面。
2.1
海洋环境观探测
水下滑翔机集群组网观测可在同一时刻不同位置对动态海洋现象实现多参数分布式感知和跟踪,显著提高海洋观测的作业效率和应用范围。目前,水下滑翔机网络在海洋调查中的应用可分为七大类:边界流区域持续断面观测、沿海和远洋过渡地带调查、中尺度和亚中尺度变异调查、浅海和边缘海调查、与现有的观测站相关的公海调查、偏远海区和极端环境调查、危险环境下的调查。国外大型海洋观测系统中几乎都出现了水下滑翔机集群编队的身影。典型组网应用如下:
1)自主海洋采样网(Autonomous Ocean SamplingNetwork,AOSN)
20 世纪 90 年代,在美国 ONR 的资助下,ASON项目汇集多种海洋观测平台(AUV,拖鱼,锚系,深海滑翔机,浮标等)在蒙特利湾构建了自适应耦合观测系统,以提高海洋观测和预测能力。2000 年8 月,ASON 一期试验跟踪了铁元素引起的浮游植物繁殖期内近岸上升流系统中生物地球化学特性的演变过程,验证了多水下滑翔机实现不同位置同步观测的技术可行性。2003 年夏季,为观测蒙特利湾上升流特征,ASON 二期试验开始实施。其中,5 台 Spray 滑翔机被应用于加利福尼亚洋流系统尺度及模式的观测中,相应的轨迹如图 4 所示。10 台 Slocum 浅海滑翔机则在 Spray 测量参数的基础上搭载了荧光计、光合有效辐射传感器,主要观测冷水羽流及其相关结构。AOSN 二期试验最具创新性的一点是将 3 台 Slocum 滑翔机组成三角队形,采用该队形对海洋特征进行自适应采样,通过 3 次编队试验验证了面向滑翔机编队的自适应控制策略的有效性。
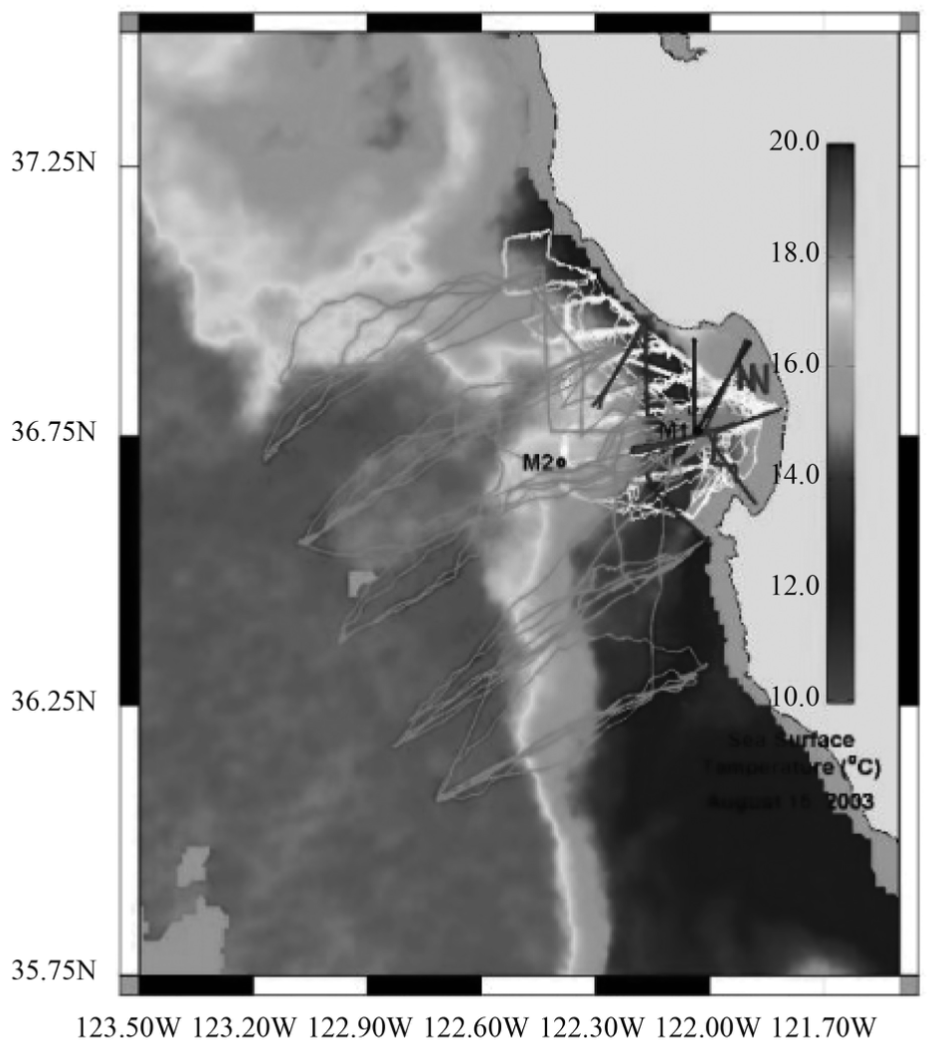
图4 ASON二期实验中的水下滑翔机轨迹
2)综合海洋观测系统(Integrated Ocean ObservingSystem,IOOS)
2002 年 3 月,美国海洋研讨会就组建综合海洋观测系统达成共识并向国会提交大会报告。2007 年2 月,NOAA 正式启动 IOOS 项目。IOOS 是国家-区域联合的全国性项目,致力于更好地获取海洋信息以提高人类跟踪、预测、管理和适应海洋环境变化的能力。为提供持续的海洋观测,2014 年 8 月,该项目制定了《U.S. IOOS® National Underwater Glider NetworkPlan》,指导水下滑翔机网络的搭建,改进数据管理系统及分发系统,构建更大的综合性三维海洋、海岸和五大湖观测系统。此外,IOOS 项目还组建了一个水下滑翔机用户组(Glider User Group,UG2)以扩大滑翔机的影响和价值。目前,滑翔机网络在 IOOS项目中主要用于生态系统动态监测、MBARI 染料跟踪试验、声学接收器及其他传感器的性能测试、红石斑鱼及其他鱼类存量测绘、墨西哥湾流中滑翔机的速度测试、有害藻华(Harmful Algal Blooms,HABs)测绘、标记鱼类声学监听、持续有针对性的海洋观测、美国加勒比海/大西洋经济专属区上层海洋监测、围绕ALOHA 及其他长期观测站的采样、水文测绘、海洋酸化采样、气候监测等。
2010 年墨西哥湾石油泄漏事件中,联邦政府、工业界和学术界等多家单位自愿提供多台滑翔机,观测事发海域海水温度、盐度和速度等参数,以确定石油随洋流运动的扩散方向(见图 5),显示了滑翔机网络相对于其他观测设备所具有的优越的应急响应能力。

图5 2010年墨西哥湾石油泄漏事件中画相机跟踪路径
IOOS 项目在加利福尼亚洋流系统中搭建了加州水下滑翔机网络(the California Underwater Glider Net-work,CUGN),开展了相应的观测任务(见图 6),可持续获取与气候变异相关的海洋物理/生物参数,并基于 50 m 深度处的温度生成了一个简单的气候变化指数。
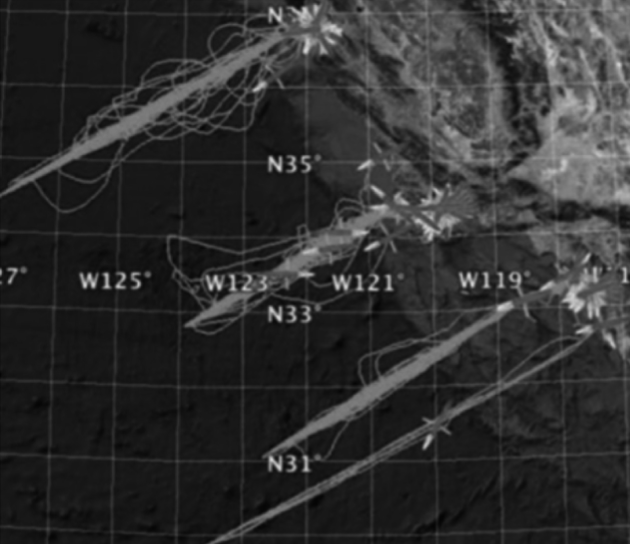
图6 2006 年以来加州海域水下滑翔机轨迹
2011 年,飓风 Irene 和 Sandy 袭击大西洋中部海湾地区,滑翔机被布放到 2 个飓风中,收集风暴来临之前、期间及过后的海洋数据。滑翔机采集到的 Irene 温度数据揭示了飓风引起的海表温度急速下降现象,此外,由于外部风带的强风接近,海水冷却发生在风眼到达之前,滑翔机轨迹如图 7 所示。
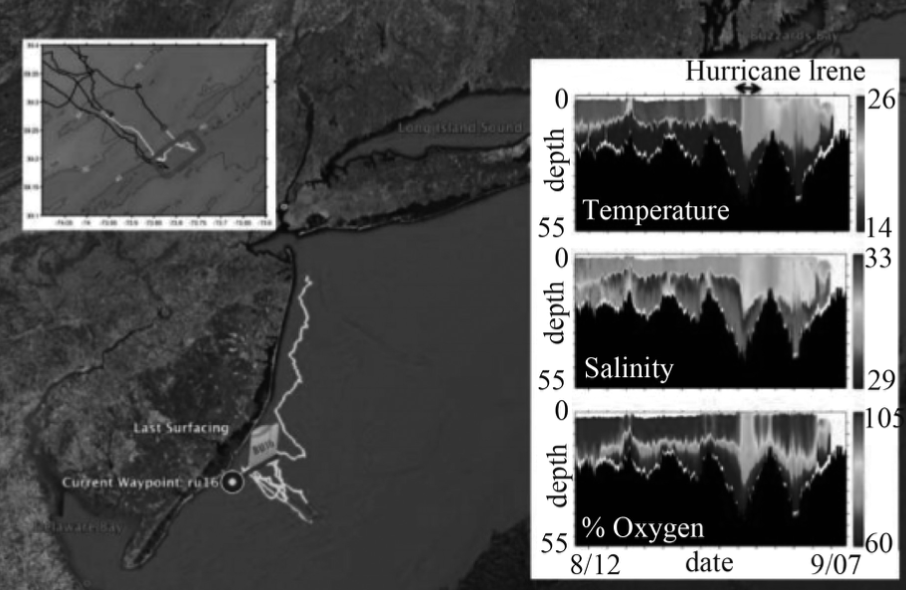
图7 2011年Irene期间滑翔机跟踪轨迹
3)欧洲滑翔机观测站(European Gliding Observat-ories,EGO)
2006 年,来自于法国、德国、意大利、挪威、西班牙和英国的海洋学家们发起了组建 EGO(Everyone\\\\\\\\\\\'sGliding Observatories)的倡议,旨在协调滑翔机应用研究,在全球范围内建立多级合作,实现全球、区域和近岸海域等不同范围内的长期多参数海洋监测任务,随后,澳大利亚、加拿大、南非和美国的海洋学家们也加入其中。迄今为止,共计 600 多台滑翔机成功执行各种海洋观测任务,完成 2 000 000 多个剖面的采集。EGO 观测中水下滑翔机轨迹,如图 8 所示。

图 8 EGO 观测中水下滑翔机轨迹
4)澳大利亚综合海洋观测系统(Australia\\\\\\\\\\\'s Integ-rated Marine Observing System,IMOS)
IMOS 始建于 2006 年,是由澳大利亚政府支持的国家性合作研究组织。ANFOG(The Australian Nation-al Facility for Ocean Gliders)作为 IMOS 下辖的一个子系统,负责运行和维护 Slocum 和 Seaglider 等多台水下滑翔机组成的机群。其中,Slocum 滑翔机主要被布放在大陆架水域,Seaglider 滑翔机则被投放于较深海域。ANFOG 系统中每台滑翔机均搭载 CTD、三参数光学传感器和溶解氧传感器,承担澳大利亚大陆架和近岸海域的测量任务,对该海域海洋现象,如涡旋内部物理和生物地球化学特性,内潮汐和沉积物再悬浮以及东澳大利亚洋流对陆架动力学影响等方面的研究做出了重大贡献。迄今为止,ANFOG 系统共布放超过180 台 Slocum 滑翔机和 40 台 Seaglider 滑翔机,执行滑翔机观测任务超过 225 次,航行时间超过 6 400 天。澳大利亚周围滑翔机的布放位置和航行轨迹如图 9 所示。
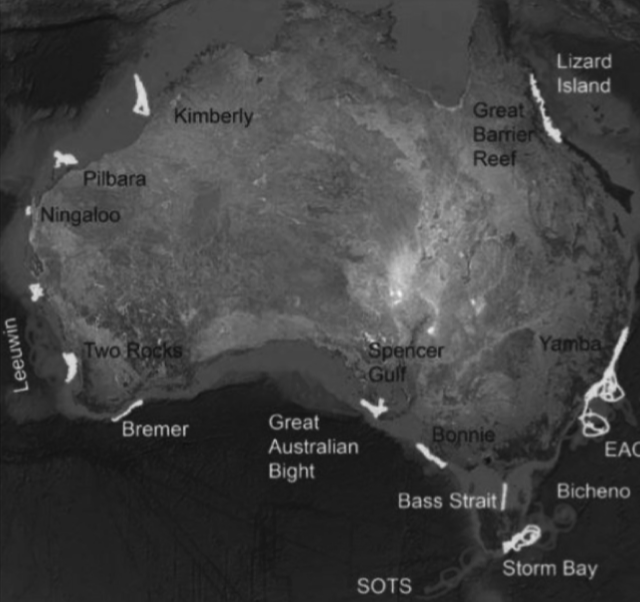
图9 澳大利亚周围滑翔机位置和轨迹
5)我国水下滑翔机集群组网应用现状
天津大学于 2014 年 9 月在西沙群岛附近开展了水下滑翔机编队与协同控制试验,本次观测任务中,3 台“海燕-II”滑翔机组成三角形队形,通过甲板控制软件同步控制,验证了滑翔机多层级协调控制策略的有效性,如图 10 所示。2017 年 8 月,天津大学依托青岛海洋科学与技术国家实验室,与中国海洋大学、中船重工第 710 研究所、中山大学、复旦大学等高校和研究机构合作,在南海北部海域布放了 12 台“海燕-II”滑翔机、各型波浪滑翔机等共计 30 余套国产海洋观测装备(见图 11),开展了面向海洋中尺度涡的多参数、综合、立体、协作、异构组网同步观测,有效提高了我国海洋观测的能力和水平。本次试验中 12 台滑翔机搭载多种传感器沿网格形轨迹对南海北部反气旋涡进行了为期 26 天的高精度采样。
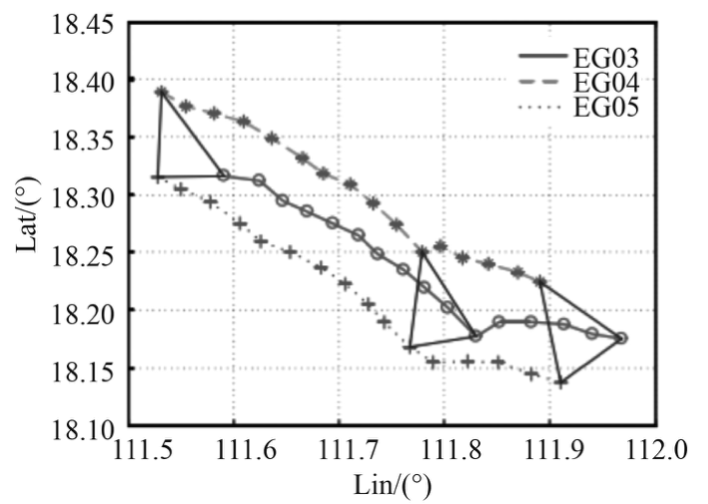
图 10 2014 年 3 台“海燕-II”滑翔机三角形队形轨迹
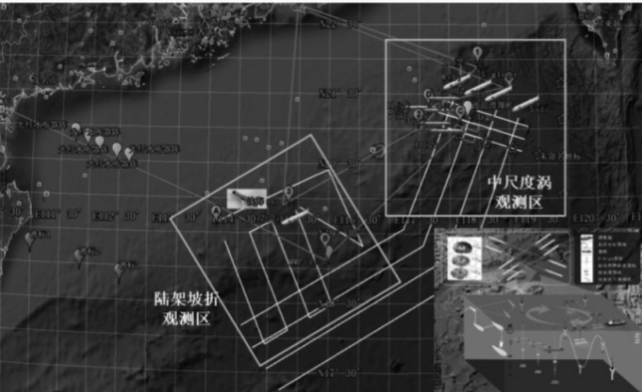
图11 2017 年“海燕”水下滑翔机南海北部立体综合观测网
2017 年 7 月,中国科学院沈阳自动化研究所在南海北部布放了 12 台“海翼”号滑翔机观测反气旋涡的三维结构和时间演变过程,如图 12 所示。本次试验中,滑翔机机群沿网格形轨迹航行,共计采集到 3 720 个温盐剖面,该数据与同时期 62 个抛弃式 XCTD 采集到的数据对比,结果显示两者均体现了中尺度涡场的特征。
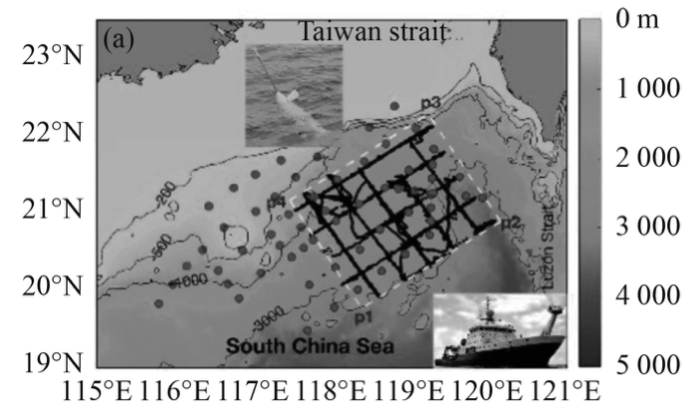
图12 2017年“海翼”水下滑翔机集群轨迹
2019 年 10 月,在我国第 10 次北极考察期间,自然资源部第一海洋研究所实施了我国首次水下滑翔机北极海域组网观测,采用 3 台“海燕”水下滑翔机搭载温盐深和溶解氧传感器,对北极海域水体与生化要素进行了组网观测。期间“海燕”完成了台风过境的全过程观测,完整记录了强气旋过程对海洋环境的影响数据。经过 22 天的组网观测,“海燕”获取到白令海公海东西方向断面连续、高密度水文和生化观测数据。2020 年初,在自然资源部印度洋联合海洋与生态研究(JAMES)计划的相关科考任务中,布放 12 台“海翼”水下滑翔机完成了我国在印度洋多参数水下滑翔机协同组网观测应用。“海翼”水下滑翔机搭载了多种类型的水文与生物化学传感器,在 300 n mile×300 n mile 观测海域内执行集群协同观测,12 台水下滑翔机累计海上工作 550 台天,航行距离 12 000 km,完成了 3 400 多个剖面的科学观测,此次任务为揭示北印度洋海水缺氧、海洋中尺度涡旋动力过程、海洋水文环境变化等方面研究提供了第一手资料。
2.2
集群水下目标探测现状
水下滑翔机在巡航中利用自身的净浮力来实现向前滑动、推进,所产生的噪声低,具有较强的隐蔽性和很好的水声探测效果。因此,基于水下滑翔机的水声探测集群,能够对任务海域的水下目标、海洋环境进行长时间、大范围的隐蔽侦察、探测和数据收集。国内外单位开展了滑翔机平台集成声学载荷并开展水下探测、通信技术的研究,取得了显著进展。近年来,主要对水下声学滑翔机集群组网探测技术开展研究。
广域海网(Seaweb)[25] 是一种典型的海底水声传感器网络,将固定节点、移动节点和网关节点通过水声通信链路连接成网。自 1998 年起,美国海军多次进行了 Seaweb 水声通信网络试验,旨在推进海军的作战能力。近年来,美军开始尝试在无人水下滑翔机 Slocum平台上搭载声学载荷,实施水下目标,水下多节点的信息交互试验。
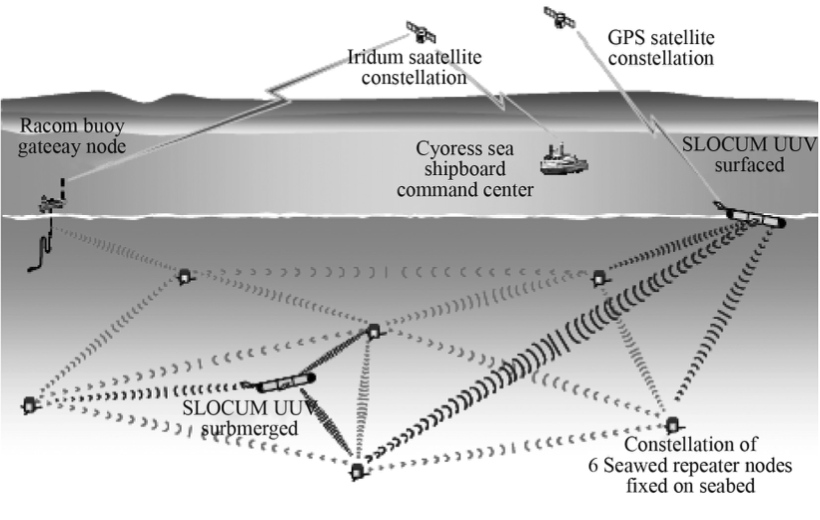
图 13 Seaweb 网络中的水下滑翔机集群示意图
PLUSNet是由美国宾夕法尼亚大学研发的一种半自主控制的海底固定和水中机动的网络化设施。该系统以核潜艇为母节点,核潜艇携带的 UUV 为移动子节点,潜标、浮标、水声探测阵为固定子节点,可获取海洋环境信息,进行水下目标探测。在“蒙特利湾2006”试验期间进行的 4 个项目试验中,PLUSNet 进行了该项目有史以来规模最大的试验,10 多艘舰艇、30 多个 UUV 以及各种浮标、潜标参加。在 2011—2014 年的欧盟合作项目 GROOM(Glidersfor Research,Ocean Observation and Management)中,评估了极限环境下声学技术用于滑翔机导航和数据传输的可行性,为现有全球海洋观测系统(Global OceanObserving System,GOOS)提供了重要的补充信息,填补了当前全球、区域和沿海观测范围内海洋观测系统所留下的空白。
2014 年,在加拿大海洋环境观测与预测响应网络中心(Marine Environmental Observation Prediction andResponse Network Centre,MEOPAR)的鲸鱼习性与听觉试验项目(Whale Habitat and Listening Experiment,简称 WHaLE)资助下,11 台搭载被动水听器滑翔机开展了为期 2 年的集群组网部署任务,任务中使用水下滑翔机执行区域内鲸鱼声特征记录与数据分析任务。

2018 年 9 月,中国科学院沈阳自动化研究所研制的 2 台“海翼 1 000”声学水下滑翔机完成为期 1 个多月的南海联合观测与通信试验。2 台水下滑翔机对试验区域的海洋环境参数与声场信息进行连续精细观测,同时通过水声通信机获取时效潜标的观测数据,并将数据通过卫星通信发回岸基监控中心。此次海上试验实施拓展了“海翼”水下滑翔机的探测功能,并验证了一种移动-固定联合观测作业新模式,为解决潜标观测数据实时化问题提供全新解决途径。
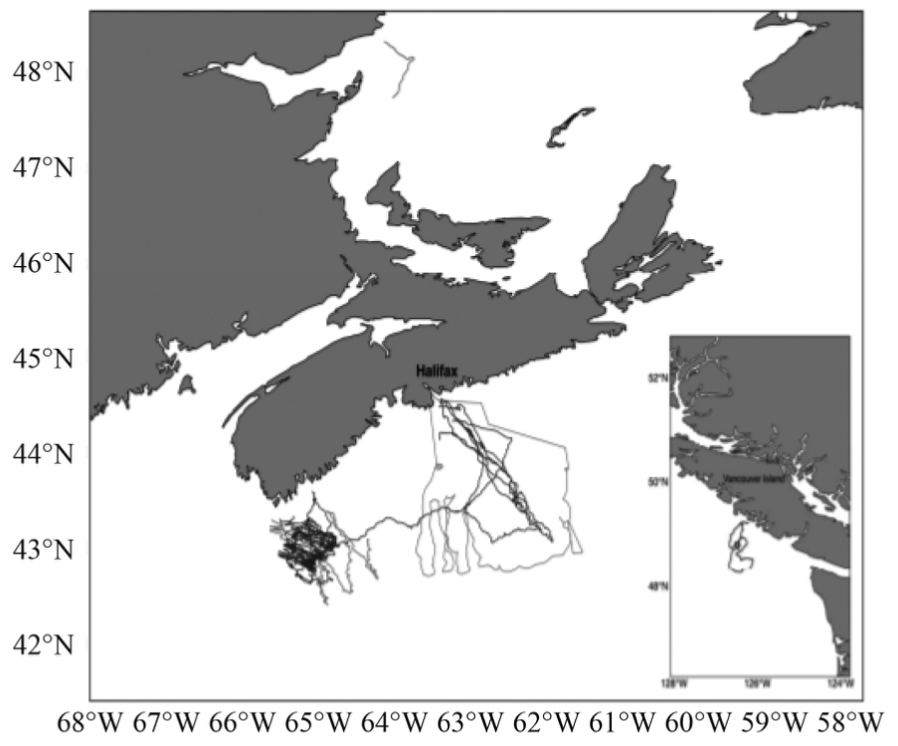
图14 滑翔机集群在WHaLE项目中的航迹图
集群探测关键技术
近年来,随着水下滑翔机集群探测观测技术的提升,行业内正在拓展将其应用于集群水下探测等方面,实现一定范围内具备对部分声学目标的探测和警戒能力。然而,鉴于水下环境的特殊性和复杂性,决定了水下声学滑翔机还面临着本体干扰、功耗高、通信能力和计算能力相对较弱等技术瓶颈。为充分发挥声学水下滑翔机集群在集群探测特别是协同组网水下声学探测体系中的作用,需要重点攻克多项关键技术。
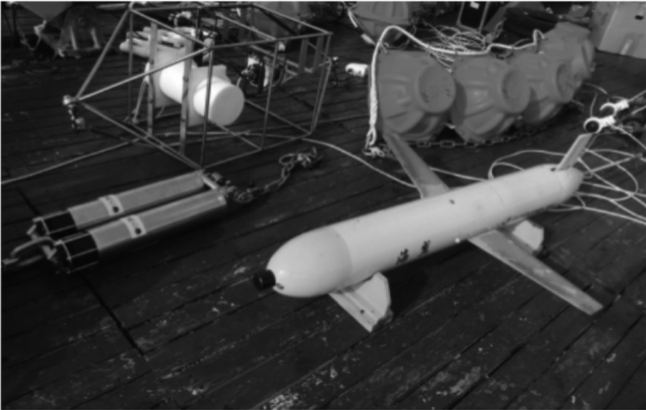
图15 “海翼”声学水下滑翔机
3.1
平台集成技术
声学任务载荷在水下滑翔机平台中的适配性对发挥探测效能起到重要作用。水下滑翔机作为运动平台,本体产生各类噪声,如机械噪声、电磁噪声、流噪声等并对任务载荷产生干扰,影响探测效能与目标解算精度,突破水下滑翔机总体集成控制技术,是研制高性能水下声学滑翔机平台的关键。
总体集成技术应开展水下滑翔机搭载平台及声学任务载荷电磁兼容性设计,降低电磁噪声干扰;优化水动力外形,水下滑翔机平台具备层流低阻水动力特性;进行水下滑翔机航行扰动噪声特性研究,开展平台高鲁棒性动稳定航行控制技术研究,削弱平台晃动对水下目标探测的影响;基于平台航行状态与功能阶段,开展平台总体、功能系统、单元器件三级振动特性、机械噪声分析,实施结构减振动降噪设计,优选设计平台共振点位,最大限度地保证水下滑翔机平台与任务载荷性能的完整性。
3.2
人工智能技术
随着大数据分析、深度学习与人工智能等技术的发展,人工智能近年来在智能感知、识别、控制领域取得了突破性进展。水下滑翔机向着“智能一代”跃进,人工智能技术将取代当前的逻辑控制器,成为未来水下滑翔机单机平台与多机集群的操控大脑。
由于海洋应用场景的特殊性,决定了水下滑翔机面临着严峻的功耗、通信能力和计算能力的限制。基于水下滑翔机平台,发展人工智能技术,可基于海洋环境场信息、声探测信息及滑翔机本体、集群状态信息,结合新兴发展的人工智能先进理论,实现水下滑翔机对海洋水体环境、敌我势能场的准实时感知、分析成像,进而增强其完成复杂水下探测任务、集群管控的能力,实现水下滑翔机对突发任务的在位应急处置和集群智能协同。
3.3
能源补给技术
水下滑翔机依靠机体携载的电池实现运行工作。因携载电池能量有限,水下滑翔机自持力、续航力受到制约。声探测载荷及附属数据处理分析系统将显著增加水下滑翔机的客栈负载能耗,导致水下滑翔机的部署频次与成本增加,降低水下声学滑翔机及集群的使用效能。
能量密度是制约当前电池发展的最大瓶颈。一方面,加强电池制造工艺、材料性能的研究,开发新材料和新化学体系,寻找短期、中期和长期的电池技术解决方案,同时发展小型化燃料电池与平台集成技术,实现水下滑翔机携载电池能量密度能够达到一个全新量级。另一方面,强化水下充电站、水下接驳入坞、水下无线充电等技术研发,并达到实用化水平,实现水下滑翔机在设定区域内值守与在位能量补给。
此外,海洋中蕴藏着巨大能量,海洋通过各种物理过程接收、储存和散发能量,也为水下滑翔机利用海洋环境能源提供了可能。海洋能包括潮汐能、波浪能、海流能、海洋温差能等多种形式,推动小型化海洋能俘获利用技术研究,突破水下滑翔机海洋自供能关键技术,可显著提升水下滑翔机的能量自给水平,增强其续航力、自持力。
3.4
水声通信技术
水下声学滑翔机在执行探测任务期间,因作业时间长,收集信息数量大,传送数据与接收决策指令的需求显著增加,对通信手段及性能提出了更高要求。目前,水下滑翔机主要采取滑翔上浮至水面,经卫星通信与岸站建立数据交互通道,并基于岸站施集中控制,开展各类数据的汇总、后处理、任务下发及水下滑翔机的调控、航线调配等工作。然而,现有通信方式难以实现水下探测数据的及时报送,且各台水下滑翔机间无法直接通信,集群难以对水下目标实施长时跟踪探测。
未来,应开展面向水下移动平台的水声通信及水声组网技术研究,突破水声中距离高速率、低功耗通信、时变信道条件下的高速水声通信编解码、时变信道下水声组网与路由及移动节点动态接入、多节点水声时空同步等关键技术,研制可满足水下滑翔机平台搭载能力与功耗负载约束的水声通信机。
发展展望
受水下环境的复杂性和水声探测技术的局限性影响,水下声学滑翔机单机平台的探测距离较近,难以形成区域覆盖能力。因此,通过技术升级和使用方案优化,将水下滑翔机进行梯次配置、组合使用,构建具备互通信能力的水下滑翔机探测集群,可以更好地发挥水下滑翔机在水声探测体系中的优势,以弥补单机平台不足,增强水下滑翔机对水下目标预警探测能力。未来,水下滑翔机探测集群可作为有人、无人系统协同探测网的重要组成部分,打造分布式的水下传感器节点,形成广域、持久的水下预警探测体系。


免责声明:本公众号目前所载内容为本公众号原创、网络转载或根据非密公开性信息资料编辑整理,相关内容仅供参考及学习交流使用。由于部分文字、图片等来源于互联网,无法核实真实出处,如涉及相关争议,请跟我们联系。我们致力于保护作者知识产权或作品版权,本公众号所载内容的知识产权或作品版权归原作者所有。本公众号拥有对此声明的最终解释权。
↓↓↓ 戳#阅读原文# ,精彩继续,你若喜欢,#分享/点赞/在看#!
