作者:付汉杰,hankf@xilinx.com,文章转载自: 赛灵思中文社区论坛
Xilinx提供超低延时编解码方案,并提供了全套软件。MPSoC Video Codec Unit提供了详细说明。其中的底层应用软件是VCU Control-Software(Ctrl-SW)。
本文主要说明为Ctrl-SW增加输出NV12视频的功能。
1.1. VCU输入和输出格式
Video Codec Unit(VCU) 输入和输出都是是NV12/NV16格式的视频,Y分量存放在一块连续内存区,UV分量交替存放在Y分量后面的连续内存。具体信息,可以参考VCU Product Guide中的“Source Frame Format”和“Memory Format”。
Ctrl-SW的输入文件最好是NV12/NV16格式的视频文件,由于不需要做格式转换,帧率(FPS)最高。但是Ctrl-SW的输出文件缺省是图像真实分辨率的I420/I422的文件,其中的Y、U、V分量,各自存在一块连续内存,UV分量没有像NV12/NV16格式的视频交替在一起。可以使用FFMPeg等工具,将I420的文件,转换成NV12/NV16格式的文件。
1.2. VCU内存的高度和宽度要求
对于视频的输入内存区,VCU要求高和宽都按32向上对齐。对于1920x1080分辨率,输入的buffer大小至少是1920x1088字节;对于3840x2160分辨率,输入的buffer大小至少是3840x2176字节。
对于视频的输出内存区,VCU要求宽以256地址对齐,高以64地址对齐。对于1920x1080分辨率,输出的buffer大小是2048x1088字节;对于3840x2160分辨率,输出的buffer大小是3840x2176字节。
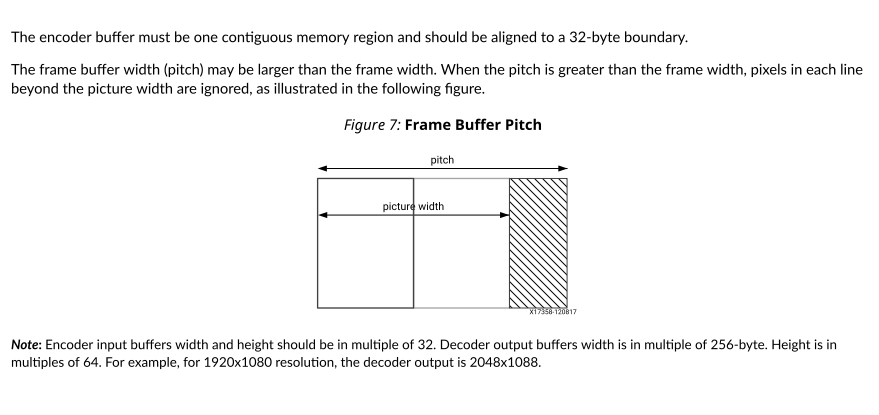
1.3. VCU内存的pitch
视频数据在内存区中存放时,两行之间的数据可以有间隔。对于每个像素的Y分量用8-bit表示的图像,每个像素的Y分量对应内存的一个字节,图像Y分量的每一行对应的内存大小就是其宽度代表的字节数。比如1920x1080,每一行图像的Y分量需要1920字节内存。如果以2048字节来存储一行1920x1080的图像数据,则在前面存放图像数据,后面的数据被VCU忽略。也可以参考PG252的“Figure 7: Frame Buffer Pitch”。
Github上的RAW yuv player 能显示YUV文件,它的旧版本Sourceforge RAW yuv player在Sourceforge上。RAW yuv player的菜单“Colour”下,有各种颜色格式,菜单“Size”下有各种分辨率;菜单"Zoom"下可以选择图像缩放比例。
RAW yuv player的YUV420(YV12)格式,就是I420格式,可以显示Ctrl-SW缺省输出的YUV文件。RAW yuv player的NV12格式,也是Ctrl-SW的NV12格式,可以显示修改后的Ctrl-SW输出的YUV NV12文件。
2.1.1. 技巧
各种YUV文件,第一片数据一般都是分量Y。如果发现YUV文件的显示有问题,可以设置好分辨率,在菜单“Colour”下选择“Y”,只看其中的分量Y,当成黑白图片看。如果黑白图片是正常的,说明分量Y是对的。
2.2. hexdump
如果图片内容不对,可以使用二进制比较工具比较错误图片和正确图片,比如Beyond Compare。比较的时候,注意取消对齐设置。
如果没有二进制比较工具,可以使用hexdump把YUV文件按HEX格式转换为文本文件,再用文本比较工具,比如kdiff3、meld进行比较。hexdump输出时,会输出星号"*"代替一样的行;多个重复行,也只输出一个星号。为hexdump加上"-v"选项,则会输出所有数据。
xilinx@XSZHANKF$ hexdump -x test_1080p_h264.264.1f.i420.1920x1080.yuv > test_1080p_h264.264.1f.i420.1920x1080.yuv.hex
xilinx@XSZHANKF$ hexdump -v -x test_1080p_h264.264.1f.i420.1920x1080.yuv > test_1080p_h264.264.1f.i420.1920x1080.yuv.v.hex
如果Ctrl-SW能输出NV12/NV16格式的文件,Ctrl-SW就能直接对自己的文件进行编码,测试时更加方便。
经过研究,在Ctrl-SW 2020.2里,实现了输出NV12/NV16格式文件的功能。
3.1. 选项
Ctrl-SW里有三种分辨率,分别是图像的真实分辨率,Meta数据分辨率,内存块(buffer)分辨率。
图像的真实分辨率,是真实显示的分辨率。
在Ctrl-SW里,为YUV数据分配内存时,根据图像分辨率,并按对齐要求像是对齐图像分辨率后,得到YUV数据的内存块大小,这就是对应的内存块(buffer)分辨率。对于解码,1920x1080分辨率的内存块是2048x1088字节;3840x2160分辨率的buffer是3840x2176字节。
另外分配内存后,每个内存块有一个对应的Meta数据,保存YUV数据的分辨率。Meta数据分辨率可能比内存块分辨率低。1920x1080分辨率的Meta数据分辨率是2048x1088;而3840x2160分辨率的Meta数据分辨率却是3840x2160,在高度上并没有像1080p时向上对齐。
所以输出NV12/NV16的视频时,也有多种组合。为了测试方便,实现了输出各种组合的NV12/NV16的视频。
如果使用选项“-yuv-nvx”,按得到的Meta数据的分辨率信息,从Y和UV分量的地址,逐行写入到文件。
如果使用选项“-yuv-nvx-1buffer”,行依照pitch长度,高使用分辨率的高度并向上按64字节对齐,计算出YUV整个的内存区大小,相当于内存块(buffer)分辨率,一次性写入到文件。
如果使用选项“-yuv-nvx-stride”,行依照pitch长度,高使用分辨率的高度,从Y和UV分量的地址,逐行输出。相当于宽按内存块(buffer)分辨率,高按Meta数据分辨率输出。
如果使用选项“-yuv-nvx-dispay”,按得到的显示分辨率信息,从Y和UV分量的地址,逐行输出。
另外,还附带增加了输出YUV文件时跳帧、抽帧的功能。如果使用选项“--yuv-skip-num”,则前面的指定数量的帧不会被输出;比如指定5,前面的5帧不会被写入到YUV文件。如果使用选项“--yuv-skip-interval”,则指定数字的倍数序号的帧,才会被输出;比如指定数字3,则只有序号是3的倍数的帧才会被写入到YUV文件。
在Ctrl-SW 2020.2里,添加如下代码后,可以直接输出NV12/NV16格式的文件。
下面是增加的全局变量定义。
int gi_yuv_output_skip_frame_num=0;
int gi_yuv_output_skip_frame_interval=0;
int gi_yuv_output_nvx_flag=0;
int gi_yuv_output_nvx_1buffer_flag=0;
int gi_yuv_output_nvx_stride_flag=0;
int gi_yuv_output_nvx_dispay_flag=0;
int gi_yuv_output_dispay_width=0;
int gi_yuv_output_dispay_height=0;
下面是增加的ctrlsw_decoder的命令行选项。
opt.addInt("--yuv-skip-num", &gi_yuv_output_skip_frame_num, "Skip frame number before writing YUV file.");
opt.addInt("--yuv-skip-interval", &gi_yuv_output_skip_frame_interval, "Interval frame number when writing YUV file.");
opt.addFlag("-yuv-nvx", &gi_yuv_output_nvx_flag, "Output NV12/NV16 YUV file.", 1);
opt.addFlag("-yuv-nvx-1buffer", &gi_yuv_output_nvx_1buffer_flag, "Output one continuous NV12/NV16 buffer to YUV file.", 1);
opt.addFlag("-yuv-nvx-stride", &gi_yuv_output_nvx_stride_flag, "Output NV12/NV16 YUV file with VCU round-up padding/stride.", 1);
opt.addFlag("-yuv-nvx-dispay", &gi_yuv_output_nvx_dispay_flag, "Output NV12/NV16 YUV file with display width.", 1);下面是在UncompressedOutputWriter::ProcessFrame()内部增加的判断是否输出NV12/NV16格式的视频文件的判断代码。
if( gi_yuv_output_skip_frame_num_local < gi_yuv_output_skip_frame_num )
{
return;
}
if( 0 == (gi_yuv_output_skip_frame_num_local%gi_yuv_output_skip_frame_interval) )
{
return;
}
if( ( 1 == gi_yuv_output_nvx_flag ) || ( 1 == gi_yuv_output_nvx_1buffer_flag )
|| ( 1 == gi_yuv_output_nvx_stride_flag ) || ( 1 == gi_yuv_output_nvx_dispay_flag ) )
{
ProcessFrameNVx( tRecBuf, info, iBdOut);
return;
}
下面是显示视频参数的代码,用于调试,可以被屏蔽掉。
void UncompressedOutputWriter::ShowVideoInfo(AL_TBuffer& tRecBuf, AL_TInfoDecode info, int iBdOut)
{
// only print one time.
static int i_call_time=0;
if( 0 != i_call_time )
{
return;
}
i_call_time++;
iBdOut = convertBitDepthToEven(iBdOut);
auto const iSizePix = (iBdOut + 7) >> 3;
TFourCC tRecFourCC = AL_PixMapBuffer_GetFourCC(&tRecBuf);
printFourCC( tRecFourCC, "Recorded frame buffer", __func__, __LINE__ );
int sx = 1, sy = 1;
AL_GetSubsampling(tRecFourCC, &sx, &sy);
int iPitchSrcY = AL_PixMapBuffer_GetPlanePitch(&tRecBuf, AL_PLANE_Y);
int iPitchSrcUV = AL_PixMapBuffer_GetPlanePitch(&tRecBuf, AL_PLANE_UV);
if( iPitchSrcY != iPitchSrcUV )
{
LogInfo("YUV Y Plane pitch: %d does not equal to UV Plane pitch:%d at %s:%d.\n",
iPitchSrcY, iPitchSrcUV, __func__, __LINE__ );
}
LogVerbose("YUV Y Plane pitch:%d, UV Plane pitch:%d at %s:%d.\n", iPitchSrcY, iPitchSrcUV, __func__, __LINE__ );
AL_TDimension tYuvDim = AL_PixMapBuffer_GetDimension(&tRecBuf);
int const iRoundUpYWidth = RoundUp(tYuvDim.iWidth, 256);
if( iPitchSrcY != iRoundUpYWidth )
{
LogInfo("YUV Y Plane pitch %d does not equal to Y Round-up Width:%d at %s:%d.\n",
iPitchSrcY, iRoundUpYWidth, __func__, __LINE__ );
}
// For 1920x1080, YuvDim.iHeight is always rounded up, it is 1920x1088.
// For 3840x2160, YuvDim.iHeight is not rounded up, it is 3840x2160.
int const iRoundUpHeight = RoundUp(tYuvDim.iHeight, 64);
if( tYuvDim.iHeight != iRoundUpHeight )
{
// For 4K video, tYuvDim.iHeight(2160) does not equal to Round-up Height(2176)
LogInfo("YUV Height: %d does not equal to Round-up Height:%d at %s:%d.\n",
tYuvDim.iHeight, iRoundUpHeight, __func__, __LINE__ );
}
//int const iNumPix = tYuvDim.iHeight * tYuvDim.iWidth; // For I420 without extra padding bytes.
const AL_EChromaMode stRecChromaMode = AL_GetChromaMode(tRecFourCC);
//int const iNumPixC = AL_GetChromaMode(tRecFourCC) == AL_CHROMA_MONO ? 0 : ((tYuvDim.iWidth + sx - 1) / sx) * ((tYuvDim.iHeight + sy - 1) / sy);
int const iLineNumPixC = (stRecChromaMode == AL_CHROMA_MONO) ? 0 : ((tYuvDim.iWidth + sx - 1) / sx) ;
int const iRoundUpLineNumPixC = (stRecChromaMode == AL_CHROMA_MONO) ? 0 : ((iPitchSrcUV + sx - 1) / sx) ;
// Get display in sResolutionFound()
int const iNumPix = tYuvDim.iHeight * tYuvDim.iWidth;
int const iRoundUpNumPix = iRoundUpHeight * iPitchSrcY;
int const iNumPixC = iLineNumPixC * ((tYuvDim.iHeight + sy - 1) / sy);
int const iRoundUpNumPixC = iRoundUpLineNumPixC * ((iRoundUpHeight + sy - 1) / sy);
int i_y_buffer_size = iRoundUpNumPix * iSizePix;
int i_uv_buffer_size = 2 * iRoundUpNumPixC * iSizePix;
int i_yuv_buffer_size = i_y_buffer_size + i_uv_buffer_size;
LogVerbose("Subsampling sx:%d, sy:%d at %s:%d.\n", sx, sy, __func__, __LINE__ );
LogVerbose("Height:%d, Width:%d at %s:%d.\n", tYuvDim.iHeight, tYuvDim.iWidth, __func__, __LINE__ );
LogVerbose("Roundup Height:%d, Width:%d at %s:%d.\n", iRoundUpHeight, iPitchSrcY, __func__, __LINE__ );
LogVerbose("iNumPix:%d, iLineNumPixC:%d, iNumPixC:%d, iSizePix:%d at %s:%d.\n", iNumPix, iLineNumPixC, iNumPixC, iSizePix, __func__, __LINE__ );
LogVerbose("iRoundUpNumPix:%d, iRoundUpLineNumPixC:%d, iRoundUpNumPixC:%d at %s:%d.\n", iRoundUpNumPix, iRoundUpLineNumPixC, iRoundUpNumPixC, __func__, __LINE__ );
LogVerbose("NV12/NV16 YUV Plane Y: %d, UV: %d YUV: %d bytes at %s:%d.\n",
i_y_buffer_size, i_uv_buffer_size, i_yuv_buffer_size, __func__, __LINE__ );
uint8_t* p_buff_y_plane = AL_PixMapBuffer_GetPlaneAddress(&tRecBuf, AL_PLANE_Y);
uint8_t* p_buff_uv_plane = AL_PixMapBuffer_GetPlaneAddress(&tRecBuf, AL_PLANE_UV);
LogVerbose("NV12/NV16 YUV Y Plane address: %p, UV Plane address: %p at %s:%d.\n",
p_buff_y_plane, p_buff_uv_plane, __func__, __LINE__ );
int const iOffsetY_UV_Plane = ( (unsigned long long)p_buff_uv_plane - (unsigned long long)p_buff_y_plane);
if( i_y_buffer_size != iOffsetY_UV_Plane )
{
LogInfo("YUV Y Plane sieze: %d does not equal to offset: %d between Y/UV plane at %s:%d.\n",
i_y_buffer_size, iOffsetY_UV_Plane, __func__, __LINE__ );
}
}
下面是增加的输出NV12/NV16格式的视频文件的主体代码。
void UncompressedOutputWriter::ProcessFrameNVx(AL_TBuffer& tRecBuf, AL_TInfoDecode info, int iBdOut)
{
if(!(YuvFile.is_open() || CertCrcFile.is_open()))
return;
static int i_call_time=0;
i_call_time++;
iBdOut = convertBitDepthToEven(iBdOut);
auto const iSizePix = (iBdOut + 7) >> 3;
TFourCC tRecFourCC = AL_PixMapBuffer_GetFourCC(&tRecBuf);
#if 1
ShowVideoInfo( tRecBuf, info, iBdOut);
#endif
int sx = 1, sy = 1;
AL_GetSubsampling(tRecFourCC, &sx, &sy);
int iPitchSrcY = AL_PixMapBuffer_GetPlanePitch(&tRecBuf, AL_PLANE_Y);
int iPitchSrcUV = AL_PixMapBuffer_GetPlanePitch(&tRecBuf, AL_PLANE_UV);
AL_TDimension tYuvDim = AL_PixMapBuffer_GetDimension(&tRecBuf);
const AL_EChromaMode stRecChromaMode = AL_GetChromaMode(tRecFourCC);
int const iLineNumPixC = (stRecChromaMode == AL_CHROMA_MONO) ? 0 : ((tYuvDim.iWidth + sx - 1) / sx) ;
uint8_t* p_buff_y_plane = AL_PixMapBuffer_GetPlaneAddress(&tRecBuf, AL_PLANE_Y);
LogVerbose("NV12/NV16 YUV data Y Plane address: %p at %s:%d.\n", p_buff_y_plane, __func__, __LINE__ );
LogVerbose("YUV data with VCU padding Height:%d, Y Width:%d, UV Width:%d at %s:%d.\n",
tYuvDim.iHeight, iPitchSrcY, iPitchSrcUV, __func__, __LINE__ );
if( 1 == gi_yuv_output_nvx_1buffer_flag )
{
// For 1920x1080, YuvDim.iHeight is always rounded up, it is 1920x1088.
// For 3840x2160, YuvDim.iHeight is not rounded up, it is 3840x2160.
int const iWriteHeight = RoundUp(tYuvDim.iHeight, 64);
//int const iNumPix = tYuvDim.iHeight * tYuvDim.iWidth; // For I420 without extra padding bytes.
int const iRoundUpNumPix = iWriteHeight * iPitchSrcY; // For NV12/NV16 with extra padding bytes.
//int const iNumPixC = AL_GetChromaMode(tRecFourCC) == AL_CHROMA_MONO ? 0 : ((tYuvDim.iWidth + sx - 1) / sx) * ((tYuvDim.iHeight + sy - 1) / sy);
int const iRoundUpLineNumPixC = (stRecChromaMode == AL_CHROMA_MONO) ? 0 : ((iPitchSrcUV + sx - 1) / sx) ;
int const iRoundUpNumPixC = iRoundUpLineNumPixC * ((iWriteHeight + sy - 1) / sy);
int i_y_buffer_size = iRoundUpNumPix * iSizePix;
int i_uv_buffer_size = 2 * iRoundUpNumPixC * iSizePix;
int i_yuv_buffer_size = i_y_buffer_size + i_uv_buffer_size;
// Display YUV file: 1920x1080: 2048x1088; 3840x2160: 3840 x 2176
if( 1 == i_call_time )
{
LogInfo("Diplay NV12/NV16 YUV file of one continuous buffer with Height:%d, Y Width:%d, UV Width:%d at %s:%d.\n",
iWriteHeight, iPitchSrcY, iPitchSrcUV, __func__, __LINE__ );
}
YuvFile.write((const char*)p_buff_y_plane, i_yuv_buffer_size);
}
else
{
int iWriteHeight;
int iWriteYWidth;
int iWriteUVWidth;
// For 1920x1080, YuvDim.iHeight is always rounded up, it is 1920x1088.
// For 3840x2160, YuvDim.iHeight is not rounded up, it is 3840x2160.
if( 1 == gi_yuv_output_nvx_stride_flag )
{
iWriteHeight = tYuvDim.iHeight;
iWriteYWidth = iPitchSrcY;
iWriteUVWidth = 2 * ((iPitchSrcUV + sx - 1) / sx);
LogVerbose("Diplay NV12/NV16 YUV file of stride with Height:%d, Y Width:%d, UV Width:%d at %s:%d.\n",
tYuvDim.iHeight, iPitchSrcY, iPitchSrcUV, __func__, __LINE__ );
}
else
{
if( 0 != gi_yuv_output_dispay_height )
{
// Display YUV file: 1920x1080: 1920x1080.
iWriteHeight = gi_yuv_output_dispay_height;
}
else
{
// Display YUV file: 1920x1080: 1920x1088.
iWriteHeight =tYuvDim.iHeight;
}
if( 0 != gi_yuv_output_dispay_width )
{
iWriteYWidth = gi_yuv_output_dispay_width;
iWriteUVWidth = 2 * ((gi_yuv_output_dispay_width + sx - 1) / sx);
}
else
{
iWriteYWidth =tYuvDim.iWidth;
iWriteUVWidth = 2 * iLineNumPixC;
}
}
if( 1 == i_call_time )
{
LogInfo("Diplay NV12/NV16 YUV file with Height: %d, Y Width: %d, UV Width: %d at %s:%d.\n",
iWriteHeight, iWriteYWidth, iWriteUVWidth, __func__, __LINE__ );
}
// two writes, skipp padding bytes between Y plane and UV plane.
uint8_t* p_buff_y=p_buff_y_plane;
int iYBytes=0;
for( int i=0; i<iWriteHeight; i++ )
{
// Write each line of Y plane, and skipp padding bytes between each line.
YuvFile.write((const char*)p_buff_y, iWriteYWidth);
p_buff_y = p_buff_y + iPitchSrcY;
iYBytes+=iWriteYWidth;
}
uint8_t* p_buff_uv_plane = AL_PixMapBuffer_GetPlaneAddress(&tRecBuf, AL_PLANE_UV);
LogVerbose("NV12/NV16 YUV data UV Plane address: %p at %s:%d.\n", p_buff_uv_plane, __func__, __LINE__ );
uint8_t* p_buff_uv=p_buff_uv_plane;
int iUVBytes=0;
for( int i=0; i<(iWriteHeight/sy); i++ )
{
// Write each line of UV plane, and skipp padding bytes between each line.
YuvFile.write((const char*)p_buff_uv, iWriteUVWidth);
p_buff_uv = p_buff_uv + iPitchSrcUV;
iUVBytes+=iWriteUVWidth;
}
LogVerbose("write NV12/NV16 YUV data Y: %d bytes, UV: %d bytes at %s:%d.\n",
iYBytes, iUVBytes, __func__, __LINE__ );
}
}
在开发过程中,测试了1920x1080、3840x2160分辨率的NV12图像。
5.1. 1080分辨率
1920x1080分辨率时,以内存块分辨率输出,分辨率是1920x1088;以pitch长度和分辨率高度向上对齐后输出,分辨率是2048x1088;以pitch长度和Meta分辨率的高度输出,分辨率是2048x1088;以显示分辨率输出,分辨率是1920x1080。如果没有特殊说明,图像都是NV12格式的,也是以NV12格式显示。
查看YUV文件时,必须设置正确的分辨率和格式,否则数据显示会混乱。
以分辨率1920x1080显示选项“-yuv-nvx-dispay”输出的图片,结果正常。
以分辨率2048x1088显示选项“-yuv-nvx-1buffer”输出的图片,结果正常。右边有一块红色图像,是因为对应的内存区没有真实图像数据。
以分辨率2048x1088显示选项“-yuv-nvx-stride”输出的图片,结果正常。右边也有一块红色图像。
5.1.1. 分辨率显示格式错误的现象
以分辨率1920x1080显示分辨率2048x1088图片,图像混乱了。因为实际图像数据每行2048字节,显示时每行1920字节,所以读出的数据混乱了,上面的连续红色块变成了小块,分布到了图像各处。
以分辨率2048x1080显示分辨率2048x1088图片,最上面有绿条,因为把8行的Y分量数据当成了UV分量数据。这8行的实际图像是黑色的。
5.2. 3840x2160分辨率
3840x2160分辨率时,以pitch长度和分辨率高度向上对齐后的分辨率输出,分辨率是3840x2176;其它模式输出,分辨率都是3840x2160。
以分辨率3840x2160显示选项“-yuv-nvx-dispay”输出的图片,结果正常。
以分辨率3840x2176显示选项“-yuv-nvx-1buffer”输出的图片,结果正常。下面有一条绿色,也是因为对应的内存区没有有效的图像数据。
5.2.1. x2160分辨率显示格式错误的现象
以分辨率3840x2176格式显示分辨率3840x2160的图片,最下面有绿条,是因为把部分UV分量数据当成了Y分量数据,导致最下面部分图像缺少UV分量数据。
以分辨率3840x2160、I420格式显示选项“-yuv-nvx-stride”输出的NV12分辨率3840x2176图片,轮廓正常,色彩异常。轮廓正常,是因为对Y分量数据的解析是对的;色彩异常是因为对UV分量数据的解析是错的。
未来可以继续测试NV16的图像,也可以测试其它分辨率的图像。
XilinxPG252 (v2020.2) H.264/H.265 Video Codec Unit v1.2 Solution
》》》点击“阅读原文”下载参考文档