滴答
#define HZ 100时钟中断
set_intr_gate(0x20, &timer_interrupt);_timer_interrupt:
...
// 增加系统滴答数
incl _jiffies
...
// 调用函数 do_timer
call _do_timer
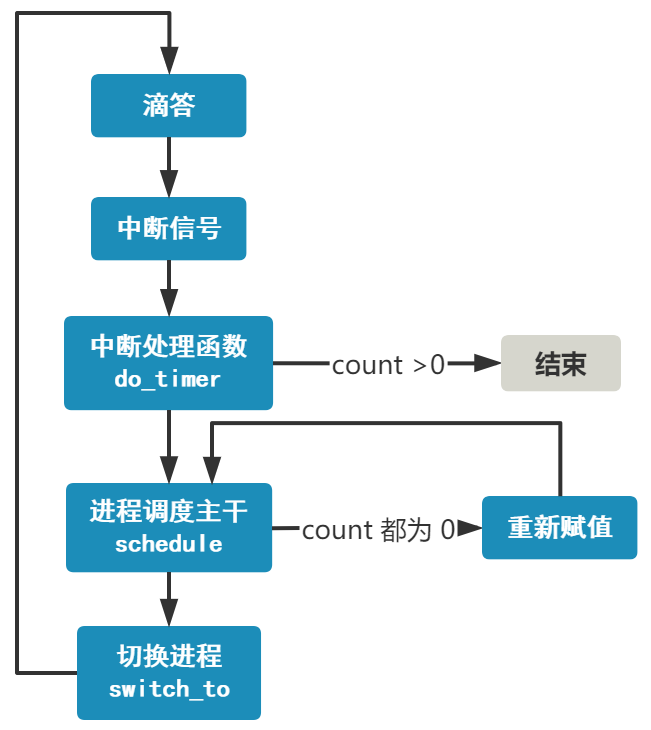
...void do_timer(long cpl) {
...
// 当前线程还有剩余时间片,直接返回
if ((--current->counter)>0) return;
// 若没有剩余时间片,调度
schedule();
}进程的调度
void schedule(void) {
int i, next, c;
struct task_struct ** p;
...
while (1) {
c = -1;
next = 0;
i = NR_TASKS;
p = &task[NR_TASKS];
while (--i) {
if (!*--p)
continue;
if ((*p)->state == TASK_RUNNING && (*p)->counter > c)
c = (*p)->counter, next = i;
}
if (c) break;
for(p = &LAST_TASK ; p > &FIRST_TASK ; --p)
if (*p)
(*p)->counter = ((*p)->counter >> 1) +
(*p)->priority;
}
switch_to(next);
}别看一大坨,我做个不严谨的简化,你就懂了。 void schedule(void) {
int next = get_max_counter_from_runnable();
refresh_all_thread_counter();
switch_to(next);
}
1. 拿到剩余时间片(counter的值)最大且在 runnable 状态(state = 0)的进程号 next。
2. 如果所有 runnable 进程时间片都为 0,则将所有进程(注意不仅仅是 runnable 的进程)的 counter 重新赋值(counter = counter/2 + priority),然后再次执行步骤 1。
3. 最后拿到了一个进程号 next,调用了 switch_to(next) 这个方法,就切换到了这个进程去执行了。
切换进程
#define switch_to(n) {\
struct {long a,b;} __tmp; \
__asm__("cmpl %%ecx,_current\n\t" \
"je 1f\n\t" \
"movw %%dx,%1\n\t" \
"xchgl %%ecx,_current\n\t" \
"ljmp %0\n\t" \
"cmpl %%ecx,_last_task_used_math\n\t" \
"jne 1f\n\t" \
"clts\n" \
"1:" \
::"m" (*&__tmp.a),"m" (*&__tmp.b), \
"d" (_TSS(n)),"c" ((long) task[n])); \
}1. 通过 ljmp 跳转指令跳转到新进程的偏移地址处。
2. 将当前各个寄存器的值保存在当前进程的 TSS 中,并将新进程的 TSS 信息加载到各个寄存器。(这部分是执行 ljmp 指令的副作用,并且是由硬件实现的)
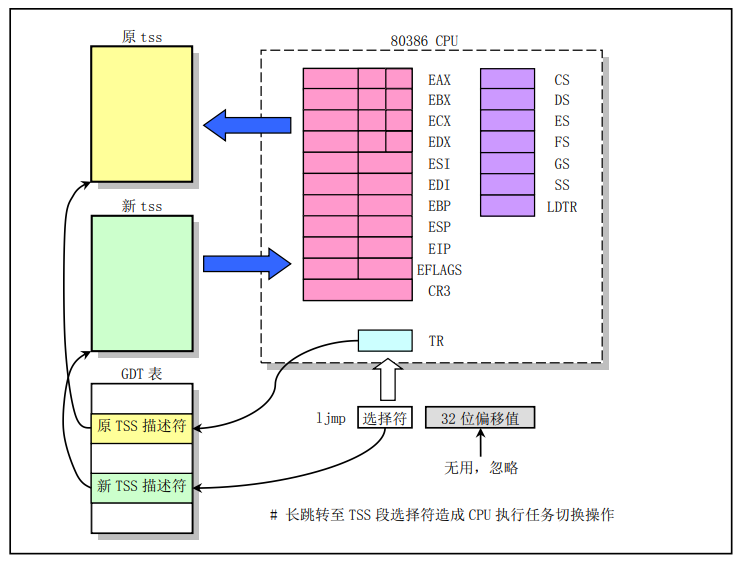
上图来源于《Linux内核完全注释V5.0》
struct task_struct * task[64] = {};struct task_struct {
long state;
long counter;
long priority;
struct tss_struct tss;
};#define TASK_RUNNING 0
#define TASK_INTERRUPTIBLE 1
#define TASK_UNINTERRUPTIBLE 2
#define TASK_ZOMBIE 3
#define TASK_STOPPED 4struct tss_struct {
...
long eip;
long eflags;
long eax,ecx,edx,ebx;
long esp;
long ebp;
...
};void main(void) {
...
// 第一步:进程调度初始化
sched_init();
...
// 第二步:创建一个新进程并做些事
if (!fork()) {
init();
}
// 第三步:死循环,操作系统正式启动完毕
for(;;) pause();
}void sched_init(void) {
// 初始化第一个进程的 tss
set_tss_desc(...);
// 将进程数组清零
for(i=1;i<64;i++) {
task[i] = NULL;
...
}
// 设置始终中断(滴答)
set_intr_gate(0x20,&timer_interrupt);
...
}后记
以上,分别从滴答视角、数据结构视角、操作系统启动流程视角,来讲解来进程调度的细节。
所谓滴答视角,可以理解为常说的进程调度视角。所谓数据结构视角,可以理解为常说的进程管理视角。
但我更喜欢我起的这两个名字,尤其是滴答视角,好可爱有木有!
不过本文是以 linux 最早的版本 linux-0.11 为例,在后来的操作系统演进过程中,进程调度的细节也在不断添枝加叶,比如选出下一个要调度的进程不再是简单地比较时间片大小,比如进程实际发生切换的时机改到了系统调用返回前,再比如对页表切换的变化等等。
但整个骨架和流程都是一样的,也即你再去研究更为复杂的现代操作系统进程调度原理时,只要按照这三个视角去分析,总是可以把握主干。
